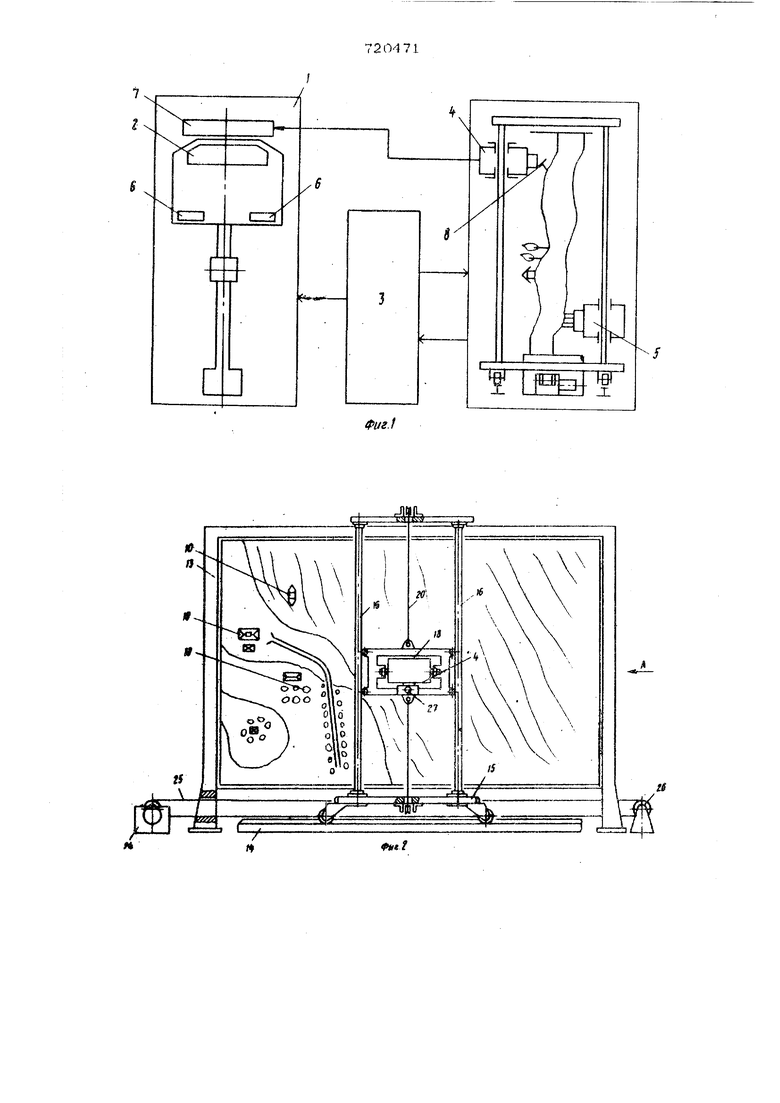
Изобретение относится к устройствам для обучения управлению транспортными средствами. Известен тренажер транспортного сред ства, содержащий вычислительное устройство и соединенные с ним кабину водите ля с органами управления и телеприемником, макет участка местности с препятст виями и. моделью транспортного средства, средства перемещения модели по макету, передающую телекамеру с входным оптическим устройством, установленным на модели, датчики линейных перемещений модели l . Известный тренажер не позволяет при обучении учитывать специфику вождения транспортного средства на воздушной подушке. Цель изобретения - является расширение функциональных возможностей при обу чении вождению транспортного средства на воздушной подушке. Поставленная цель достигается тем, что тренажер имеет устройство отображения условий движения, состоящее из экрана с участками различной проводимости, расположенными в соответствии с расположением препятствий и р ельефа макета местности, и второй модели транспортного устройства, размещенной над ним с соединенной со средствами перемещения первой модели, при этом вторая модель транспортного средства выполнена в виде блока щупов-датчиков линейных перемещений модели, а макет участка местности с препятствиями выполнен из эластичного материала. Сущность изобретения поясняется чертежами, где на фиг. 1 изображена блоксхема тренажера; на фиг. 2 - вид на макет сбоку; на фиг. 3 - вид по А. Тренажер содержит (фиг. J.) кабину 1 с органами управления - пультом управления движением 2, установленную на трехстепенном стенде связанную с вычислительным устройством 3 и со средствами перемещения моделей 4 и 5, В кабине установлены также имитаторы
3720471
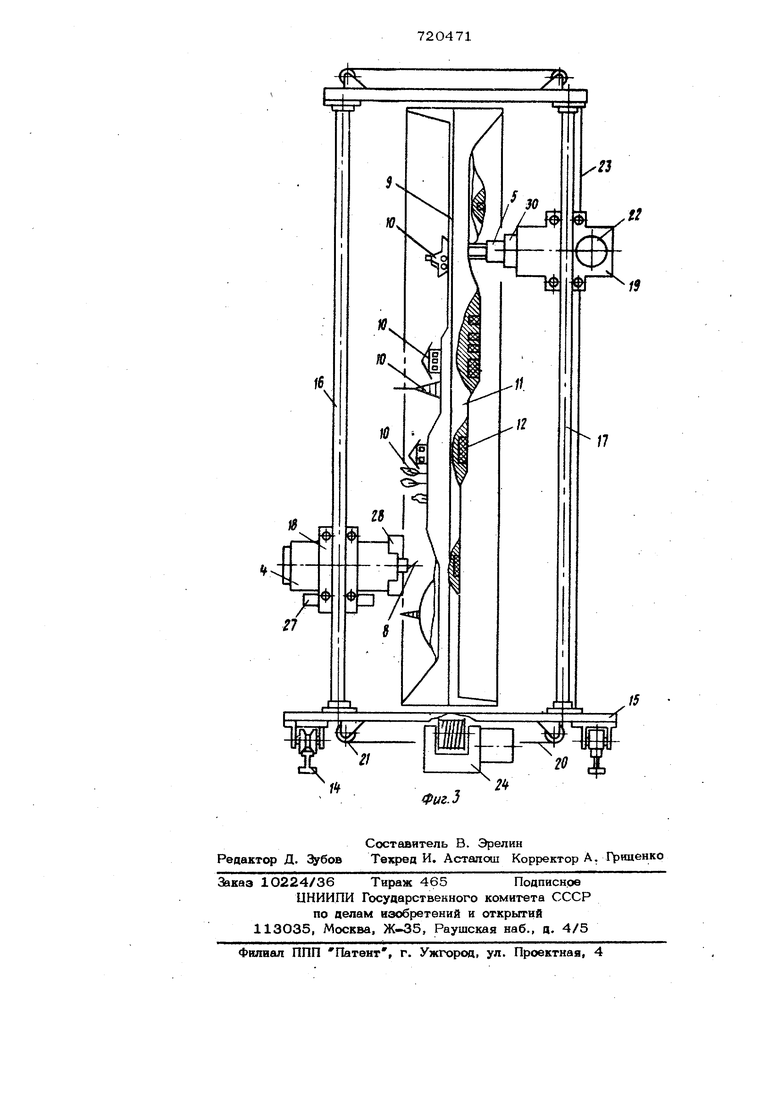
:шумо® 6 и телеприемник 7, соедмпенный ,;X;jie)SCT o;/J телевизионной снстемь с не рецающеЭ телекамерой. Бкодпое опткчес- кое устройство 8 которой размещено на первой недели транспорт11О10 срецства, над f faseTOM участка ;десгности У; вы числктейьноб: устройство 3 соецяпено с устройстЕок отображения условий иваже™ ния и со средствами перемещения кюаеле Макет участка мостпесги О с препятс BUsviH (фиг. 2) 10 BbmoiuieH нз :-)ласт5Чного материала, напрямер, ;э поролона. Устройство етраженяя цв-тсения (фиг. 3) содержит экран 11. из твердого материала электропроводящим покрытием, например, из полированной металлической пластины (могут быть использованы также фольга, электропроводящие лаки и краски), нанесенный на подходящую изоляционную основу, например бума гу. На поверхности экрана, заподлицо с ней,. размещены участки (площадки) 12, выполненные из изоляционного материала Границы этих участков и их положение н модели приведены в соответствие с кон. турами н положением макетов 9 препятс ВИЙ. Электропроводящее покрытие электр чески связано с ВУ 2. Дпя учета характеристик разп ::чных участков макета 9 на электропроводящем покрытии экрана 11 размещены также участки, конфигурация и положение кото рых соответствуют зонам макета, выпол ненные из покрь тий с заданным соотношением проводимостей. Эти участки свя заны с вычислительным устройством 3. Вторая модель 5 транспортного средства размещена над экраном 11 а выполнена в виде блока, например щупов«-датчиков линейных перемещений, расположенны по периметру модели 5, например, в вер шинах прямоугольника. Держатель блока имеет постоянный заданный уровень относительно нулевой плоскости экрана 1О, При перемещении модели 5 по рельефу экрана 11 изменяется только положение щупов. Макет 9 и экран 11 закреплены на вертикальном неподвижном каркасе 13, при этом они расположены вертив:аг1ьно, параллельно друг другу, во вне своими рельефными. сторонами, а один из них повернут на 18О относительно другого. С каркасом 13 жестко связаны сред ства перемещения моделей, соаер}Кйщие неподвижные горизонтальные направляющ
14 для тележки 15, расположенные .вдоль плоскости каркаса 13. Тележка 15 несет нп себе вертикальные направляющие 16, 17 для кареток 18, 19 соответственно. Вертикальные направляющие 10 распопо- ;кены со стороны м 1кета 9, направляющие 17 - со стороны экрана 11. .Оля синхронизации положений кареток 18, 19 относительно макета 9 и экрана 11 они связаны друг с другом нерастя- жимой гибкой нитью 20, например тросом, на направляющих роликах 21, На каретке 19 установлен привод 22, вал которого связан с вертикальной нерастяжнмой нитью 23, например тросом, закрепленным своими концами на тележке 15, С помощью привода 22 каретки 18,, 19 перемещаюгся по вертикальным напрарляющим 16, 17 относительно макета 9 и экрана 11 соответственно. -Для nepefviemeHHa тележки 15 по го ризонтальныгя направляющим 14 на каркасе 13 устаноЕчЛек привод 24, вьгходной вал которого нирастяжимой гибкой нитью 25; например тросом, на направляющих полмкак 26 соединен с тележкой 15, На керетке 18 усганозлено оптическое устройство 8 и привод 27 следящей системы удержания заданного урспня оп- ТИЧ9СХОГО устройстБа относительно макета 9. Зпткчепкоб устройство 8 снабжено приводим 28 для перэмеи1ений зхсаного его зеркала 20 по углам крена, G.Hf;|xj)e-. рента и ло курсу по сигналам вычисли- тельгзого устройства 3. ffa 19 аакойплена модель 5 и siDrfaoQ, оО :4ля перемеьчения ее по курсу п- ...:игкалам вычислительного устройст;:-;;; 3 синхронно s синфазно с соответствухОД.иу перемещением входного зерка. 9гтажер работает -сшедующим обра-- jpa6o bo очередной учебной за 3 ц.Сгьтр rios устройство 3 ВV t t -.м -tir,j внешних условий (око лрэзлезиь ветра, температуру Hdc - чого , Дальность водной по- зсгглзка, количество топлива). Зыбрацные обучаемым текущие парамелги. г зиженая тргшспортного средства на воздушной также вводят вычислительное устройство 3 с пульта управления движением 2, По введенным параметрам внешних условий текущим параметрам движения 572 вычислительное устройство 3 отрабатывает параметры цвиження транспортного средства в заданной обстановке и выдает управляющие сигналы в различные устрой ства тренажера, в том числе на приводы 22, 24 для соответствующего перемещения кареток 18, 19, несущих модели 4 и 5, по координатам плоскости и на приводы ЗО, 28 для разворота модели 5 и входного зеркала 29 по курсу. Очевидно, что любое изменение водителем параметров движения найдет свое отражение в характере перемещения модели 4 и входного зеркала 29. При перемещении модели 5 по рельефу экрана 11 щупы независимо друг от друга изменяют свое положение и, следовательно, изменяются сигналы на входы вычислительного устройства 3 от связанных с ними датчиков линейных перемещений. Величины сигналовот датчиков характертзуюг значения уровня и углов ник лона модели 5 по дифференту и крену Исходное положение блока щупов-датчиков 5 отрегулировано таким образом, что, когда модель 5 находится на некотором контрольном уровне (уровень водной поверхности) датчики не выдают сигналов, поэтому вычислительное устройство 3 определяет по сигналам от датчиков как среднюю высоту площадки местности, над которой в данный момент време- ни находится модель 5, так и углы ее наклонов по крену и дифференту. При этом, учитьтая особенности расположения кабины на реальном транспортнсм/ средстве (слева впереди), угол наклона по дифференту определяют по сигналам от датчиков, связанных с левыми носовым и кормовым щупами, а угол наклона по крену - левым и правым носовыми щупами. Отработанная вычислительным устройством 3 средняя высота местности, суммируется с высотой висения транспор ного средства над экраном, которая вычисляется по известным зависимостям от характеристик транспортного средства. Сигнал, пропорциональный суммарной высоте, поступает на привод 27 оля изменения уровня модели 4 относительно плос кости макета 9. Аналогично вычислительное устройство 3 суммирует текущие углы продольных и поперечных уклонов рельефа экрана 11 с текущими углами по дифференту и крену транспортного средства и выдает соответствующие сигналы на привод 28 1 для угловых перемещений по дифференту и крену входного зеркала 29. При наезде модели 4 на любое из препятствий 1О соответствующий щуп модели 5 попадает на изолированную площадку 12, моделирующую это препятствие, электрическая цепь между экраном 11 и щупом рвется и сигнал об этом поступает в вычислитеоьное устройство 3, которое отрабатывает по известным зависимостям соответствующие этой ситуации параметры движения транспортного средства , например скорость движения, по курсу в ту или другую сторсжу, в зависимости от того, какой щуп нахоактся на изолированной площадке 12. Сигналы вычислительного устройства 3 о наезде или изменении параметров движения поступают на устройства, которые отрабатывают соответствующие шумовые эффекты (имитаторы 6 шумов), производят наклоны и развороты кабины 1 воаителя (трехстепенный стенд), и на привопы 22, 24, 27, 28 для изменения зрительного восприятия при указанных перемещениях кабины 1 водителя. Ф о р м ула изобретения Тренажер транспортного средства, содержащий вычислительное устройство и . соединенные с ним кабину водителя с органами управления и телеприемником, макет участка местности с препятствиями и моделью транспортного средства, средства перемещения модели по макету, передающую телекамеру с входным оптическим устройством, установленным на модели, датчики линейных перемещений модели, отличающийся тем, что, с целью расширения гшшиональных возможностей при обучении вождению транспортного средства на воздушной подушке, он имеет устройство отображения условий движения, состоящее из экрана с участками различной проводимости, рас-положенными в соответствии с расположением препятствий и рельефа макета местности, и второй модели транспортного средства, размещенной над ним и соединенной со средствами перемещения первой модели, при этом вторая модель л-ранспортного средства выполнена в виде блока щупов-датчиков линейных перемещений модели, а макет участка местности с препятствиями выполнен из эластичного материала. Источники информации, принятые во внимание при экспертизе 1. Патент Франции № 2О44859, кл. G 09 В 9/ОО, 1971.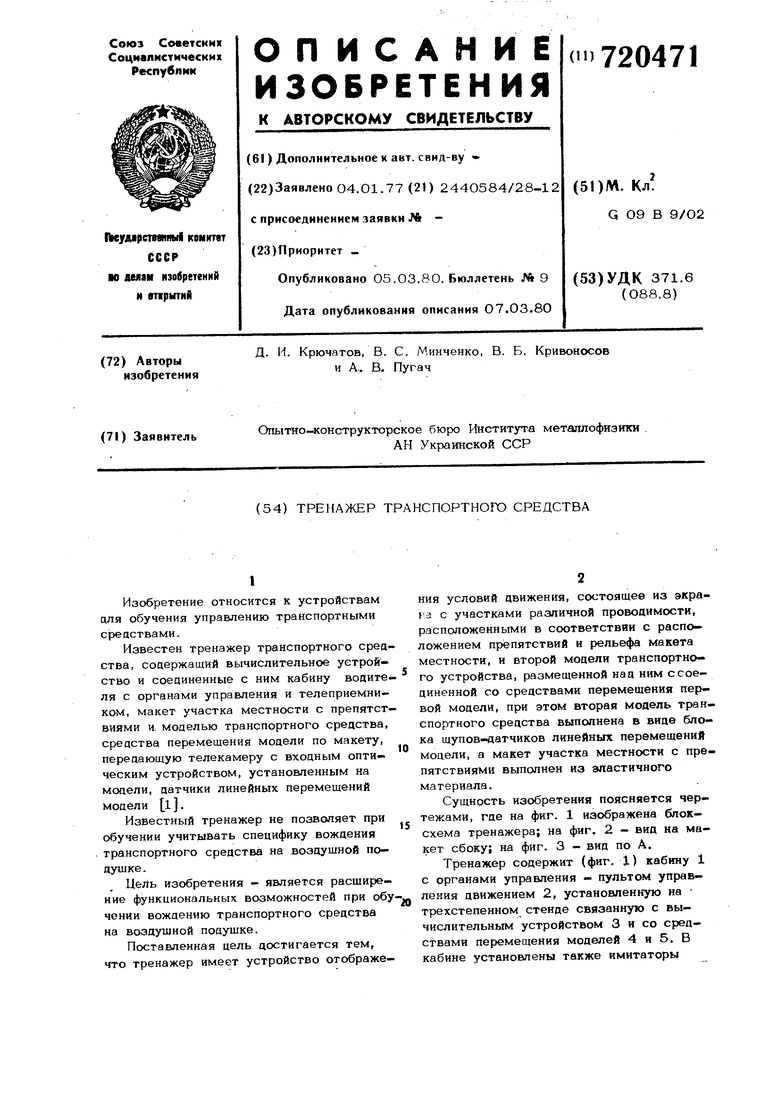
| название | год | авторы | номер документа |
|---|---|---|---|
| Тренажер транспортного средства | 1983 |
|
SU1141442A1 |
| Тренажер водителя транспортного средства | 1980 |
|
SU938298A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1401503A1 |
| Система имитации визуальной обстановки на транспортном тренажере | 1976 |
|
SU636660A1 |
| Тренажер транспортного средства | 1981 |
|
SU1054829A1 |
| ТРЕНАЖЕР ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2008 |
|
RU2367027C1 |
| Устройство имитации визуальной обстановки тренажера оператора транспортного средства | 1981 |
|
SU1010641A1 |
| Устройство имитации условий движения транспортного средства для тренажера | 1990 |
|
SU1798810A2 |
| Устройство имитации условий движения транспортного средства для тренажера | 1984 |
|
SU1365109A1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |