теля с одним из щупов-измерителеи, при этом счетчик импульсов через элемент блокировки иодсоединен с исполиителы-юму механизму.
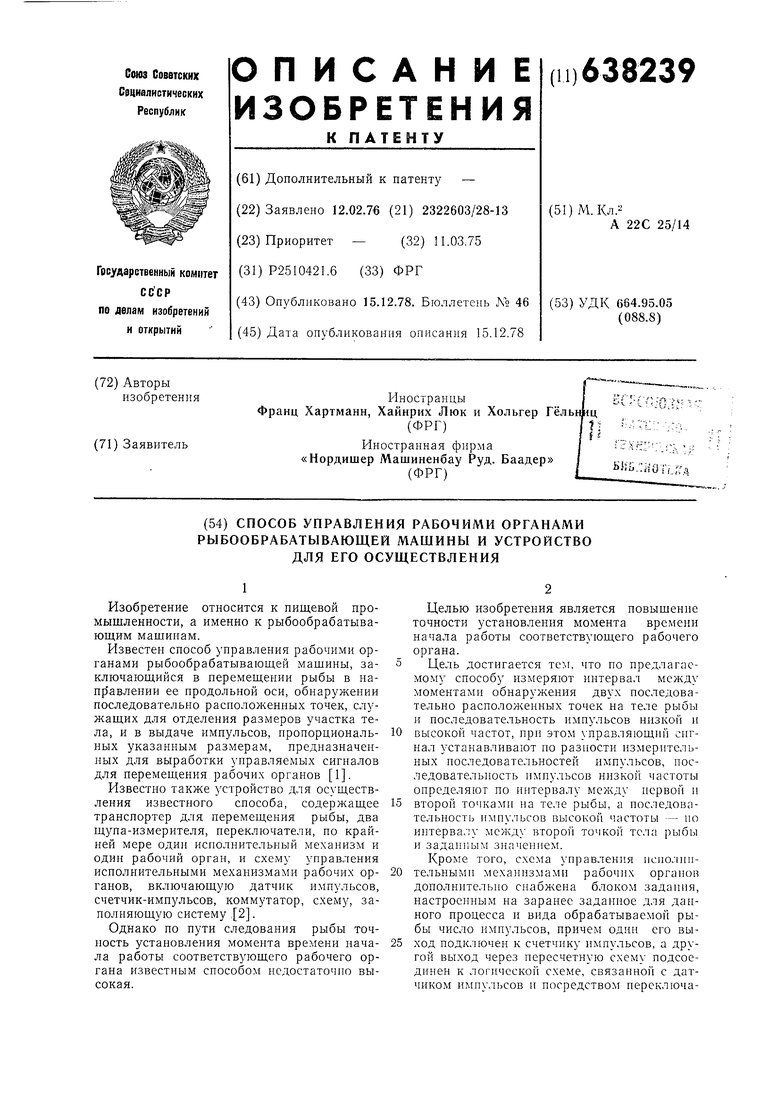
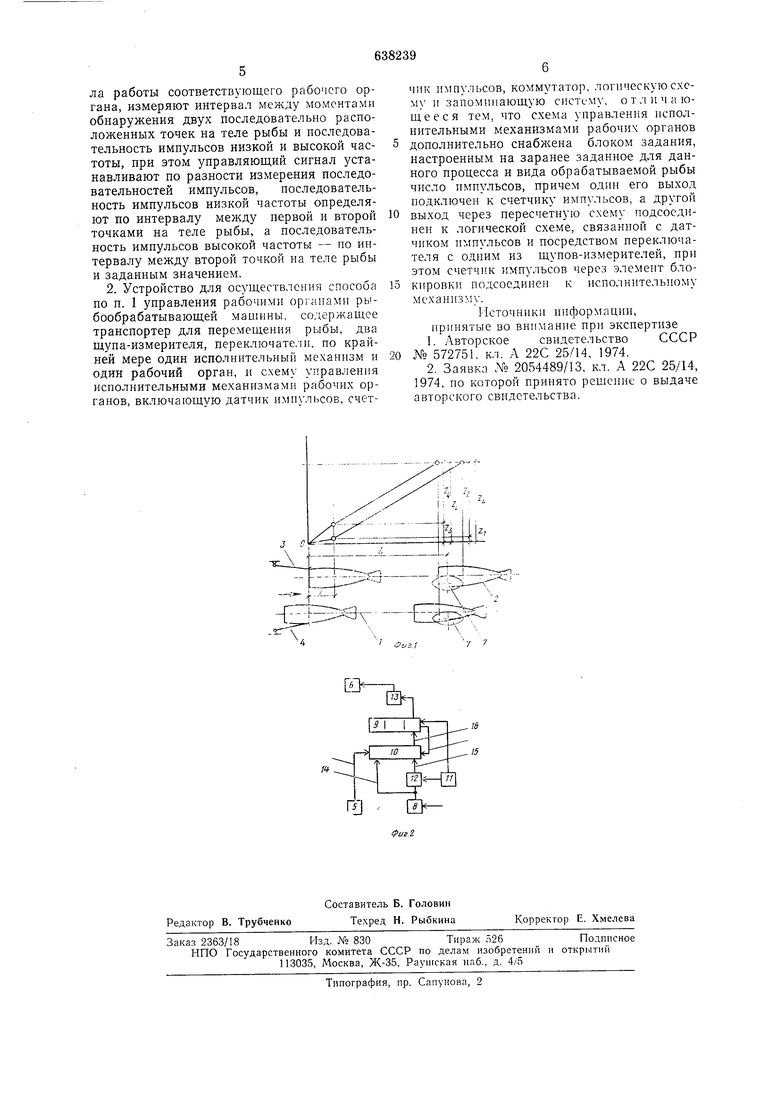
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - схема нути следования рыбы Б обрабатывающей машине.
Устройство для осуш.ествления снособа содержит транспортер 1 (условно изображен штрих-нунктирной линией) для перемещения рыбы 2, два щупа-измерителя 3 и 4, переключатели 5, иснолнительный механизм 6, рабочий орган 7 и схему унравлепия иснолнител ного механнзма рабочих органов.
Схема управления включает в себя датчик 8 импульеов, счетчик 9 импульсов, логическую схему 10, блок 11 задания, настроенный на заранее заданное для данного процесса и вида обрабатываемой рыбы число импульсов, причем один его выход подключен к счетчику 9 импульсов, а второй выход через нересчетную схему 12 подсоединен к логической схеме 10, связанной с датчиком 8 импульсов и посредством переключателя 5 с одннм из Н1,упов измерителей, прн этом счетчик 9 импульсов через элемент 13 блокпровки подсоединен к исполнительному механизму 6.
Для рыбы, измеренной посредством щупа
3у своего первого места, подсчет импульсов нервой частоты начинается нрп О и следует ио нрямой до места точки, в которой рыба вторым онределенным меетом проходит щуп
4и отложенный путь на графпке соответствует длине / полости живота. От этого момента времени с достигнутым числом Zi импульсов первой (низкой) частоты складываются импульсы 2ч второй частоты, которые следуют по нрямой и у места определенной точки оси времени достигают общего числа ZL, импульсов и вызывают введение в действие рабочего органа 7. При этом рыба :онщ)м полости живота уже достигла положения, которое лежит сзади рабочего органа, так что последний сможет выполнять разрез лишь в оставшейся - со стороны головы - части рыбы. Это соответствует, иапример, вырезанию рыбных костей из мяеа в зажатой рыбе.
Если подсчет времени начинается нри нрохожденин нервого определенного места рыбы у щупа 3 при О и следует по прямой с первой, по более высокой частотой, то число импульсов, достигшее после прохождеиия второго определенного места рыбы у щупа 4 на месте оси времени, достигнет величины Zs, с которой затем онять сложится последовательность имнульсов второй частоты, которые после числа Z4 оиять достигают общего числа Z/, н нри последнем вызывают введение в действие рабочего органа 7. Рабочий орган 7 начинает свой разрез уже перед прибытием конца полости живота рыбы н может, нанример, служить в качестве рабочего органа для вырезания
стебля рыбиых костей для переработкп рыбы.
Блок 11 задания в соответствии с видом подлежащей обработке рыбы настраивается на определенное значение, например на значенне . При этой настройке частота идущих через импульсную линию 14 от датчика 8 имнульсов в пересчетную схему 12 уменьшается пропорционально числу Р и
через ответвляющую линию 15 прикладывается к сопрягающей логической схеме 10. При срабатывании переключателя 5 нри помощи щупа 3, контролирующего первое место, нанрнмер конец полости ее живота рыбы, схема совпадений сопрягающей логической схемы 10 открывает подачу проходящих через линию ответвления 15 импульсов иервой частоты. Последние через линию 16 счета попадают в счетчик 9 имиульсов. При
произошедщем посредством измерения второго места рыбы, иапрнмер ее головной части, с помощью щупа 4 размыканий переключателя 5 схема совпадений сопрягающей логической схемы 10 переключается с
ответвляющей линии 15 на импульсную линию 14 так, что с этого мгновения импульсы с частотой, нолучаемой из датчика 8 импульсов, попадают в счетчик 9 импульсов и в пос.леднем складываются с уже со считанным здесь до заранее выбранного общего числа Z, имнульсов. При достижении общего числа ZL счетчик 9 импульсов выдает включающий имнульс на элемент 13 блокировки.
Однако счетчик 9 имнульсов одновременно выдает также и стирающий импульс через стирающую линию на логическую схему 10, вседствие чего происходит стирание информации со счетчика импульсов.
Для того, чтобы можно было использовать измерение величины в плотной последовательпости проходящей рыбы для управления рабочими органами или , иеобходимом параллельио со счетчиком имнульсов включить еще один или неско.тько счетчиков импульсов, которые в этом случае соответственно при иомощи переключателя 5 включаются вместе со счетчиком импульсов и элемеит 13 блокировки в готовность счета или готовность управления.
Формула изобретения
1. Способ унравлепия рабочими органами рыбообрабатывающей машины, заключающийся в перемещении рыбы в направлении ее продольной оси, обнаружении последовательно расположенных точек, служащих для определения разм::ров участка тела рибы, и в выдаче имиульсов, пропорциональных указанным размерам, предназначенных для выработки управляющих сигналов для перемещеиия рабочих органов, отличающийся тем, что, с целью повышения точностп устаиовлепия момента времени начала работы соответствующего рабочего органа, измеряют интервал между моментами обнаружения двух последовательно расположенных точек на теле рыбы и последовательность импульсов низкой и высокой частоты, при этом управляющий сигнал устанавливают по разности измерения последовательностей импульсов, последовательность импульсов низкой частоты определяют по интервалу между первой и второй точками на теле рыбы, а последовательность импульсов высокой частоты - по интервалу между второй точкой на теле рыбы и заданным значением.
2. Устройство для осуществления способа по п. 1 управления рабочими органами рыбообрабатывающей машины, содержащее транспортер для перемещения рыбы, два щупа-измерителя, переключатели, по крайней мере один исполнительный механизм и один рабочий орган, и схему управления исполнительными механизмами рабочих органов, включающую датчик импульсов, счетчик импульсов, коммутатор, логическую схему и запоминающую систему, отличающееся тем, что схема управления исполнительными механизмами рабочих органов дополнительно снаблсена блоком задания, настроенным на заранее заданное для данного процесса и вида обрабатываемой рыбы число импульсов, причем один его выход подключен к счетчику импульсов, а другой выход через пересчетную схему подсоединен к логической схеме, связанной с датчиком импульсов и посредством переключателя с одним из щупов-измерителей, ири этом счетчик импульсов через элемент блокировки подсоединен к исполнительному механизму.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 572751. кл. А 22С 25/14, 1974.
2.Заявка 2054489/13, кл. А 22С 25/14, 1974, по которой принято о выдаче авторского свидетельства.
7 7
..

| название | год | авторы | номер документа |
|---|---|---|---|
| Электронное управляющее устройство с исполнительными элементами рыбообрабатывающей машины | 1987 |
|
SU1716945A3 |
| Рыборазделочная машина | 1973 |
|
SU506368A1 |
| Система для испытания транспортных средств на топливную экономичность | 1985 |
|
SU1587367A1 |
| Система автоматизированного вождения машинно-тракторных агрегатов | 1982 |
|
SU1060130A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2016 |
|
RU2645979C2 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ РЫБЫ | 1996 |
|
RU2104647C1 |
| АНАЛИЗАТОР КООРДИНАЦИИ ДЕЙСТВИЙ | 1970 |
|
SU280066A1 |
| ПРИЕМНОЕ ЧАСТОТНОЕ УСТРОЙСТВО | 1971 |
|
SU290463A1 |
| Устройство для регистрации графической информации | 1973 |
|
SU499571A1 |
| ЦИФРОВОЙ СЕРВОПРИВОД | 2016 |
|
RU2643179C1 |
