2. Система по п. 1, отличающаяся тем, что программный блок снабжен тремя одновибраторами, связанными своими выходами с усилителями выглубления рабочих органов, подъема и опускания копирующего механизма, селекторами-мультиплексорами и постоянными запоминающими устройствами в количествах, равных числу элементов -программы поворота, и логической схемой,при этом входы одновибраторов связаны через триггер с переключателем режимов управления, управляющие входы постоянных запоминающих устройств подключены к переключателю программ поворота,а выходы - к первым входам селекторов-мультиплексоров, вторые входы которых соединены с выходами счетных декад, причем входы логической схемы подключены к выходному дешифратору, а выходь через логические элементы И и ИЛИ связаны с усилителями поворота направляющих колес трактора.
3. Система по п. 2, отличающаяся тем, что логическая схема состоит из логических элементов НЕ, подключенных к выходному дещифратору программного блока, при этом вход первого элемента НЕ соединен с вторым в усодом дешифратора, вход второго элемента НЕ - с третьим выходом дешифратора и с выходом первого элемента НЕ, вход третьего элемента НЕ - с пятым выходом дешифратора и с выходом второго элемента НЕ, вход четвертого элемента НЕ - с выходами третьего и шестого элементов НЕ и с шестым выходом дешифратора, вход пятого элемента НЕ - с третьим выходом дешифратора, вход шестого элемента НЕ - с выходом пятого элемента НЕ и с четвертым входом дешифратора, а выходы четвертого и шестого элементов НЕ через логические элементы ИЛИ и И связаны с усилителями исполнительных механизмов поворота направляющих колес трактора.


| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматизированного вождения колесных машинно-тракторных агрегатов | 1981 |
|
SU1033033A1 |
| Устройство для автовождения колесных машинно-тракторных агрегатов | 1984 |
|
SU1235458A1 |
| Устройство для оценки качества автовождения сельскохозяйственного агрегата | 1984 |
|
SU1186101A1 |
| Устройство для автовождения машинно-тракторных агрегатов | 1986 |
|
SU1405719A1 |
| Устройство для управления движением трактора | 1980 |
|
SU1014489A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для автоматического регулирования глубины хода рабочих органов | 1987 |
|
SU1523072A1 |
| Устройство для вождения колесного машинно-тракторного агрегата на рабочем гоне и поворотной полосе | 1980 |
|
SU934942A1 |
| Устройство для поворота трак-ТОРНыХ АгРЕгАТОВ | 1979 |
|
SU808024A1 |
| Устройство для автоматизированного поворота тракторного агрегата | 1979 |
|
SU988212A1 |
1. СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ МАШИННОТРАКТОРНЫХ АГРЕГАТОВ, содержащая датчики траекторной ошибки, положения направляющих колес и бокового крена трактора, связанные со схемой управления движением на рабочем гоне, датчик положения рабочих органов, связанный с переключателем режимов управления, датчик скорости, связанный через тактовый генератор с программным блоком, схемы стабилизации положения направляющих колес и регулировки величины и интенсивности управляющего воздействия, связанные с переключателем режимов управления, и усилитель, связанный своими вы.ходами с исполнительными механизмами поворота направляющих колес, отличающаяся тем,что,с целью повыщения эффективности использования системы за счет автоматизации управления рабочими органами, в нее введены исполнительные механизмы с усилителями для выглубления рабочих органов, подъема и опускания копирующего механизма, связанные с программным блоком, и исполнительные мехаI низмы с усилителями для заглубления рабочих органов и поворота копирующего меха(Л низма, связанные с переключателем режимов управления. 05 о w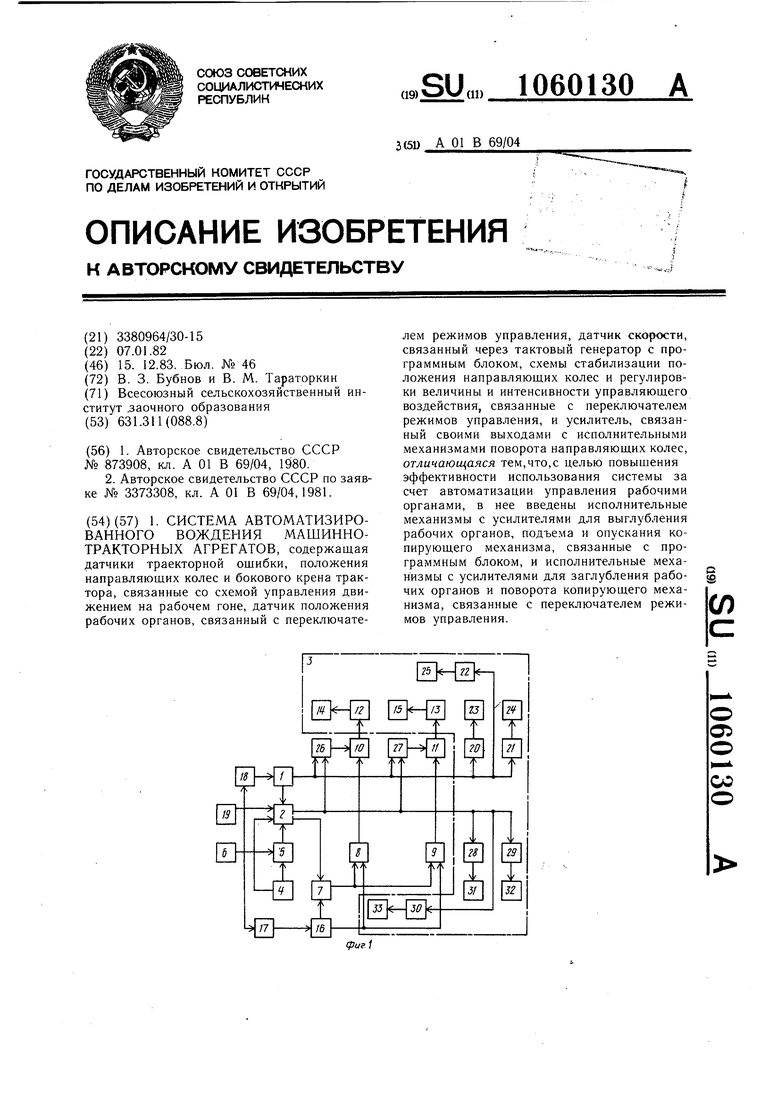
Изобретение относится к устройствам для автовождения сельскохозяйственных машинно-тракторных агрегатов и может ,быть применено для автоматизации управления движением колесных машинно-тракторных агрегатов на рабочем гоне и поворотной полосе при выполнении полевых механизированных работ.
Известно устройство для автоматизированного вождения-Трактора на поворотной полосе, реализующее универсальный алгоритм поворота, с учетом скорости движения трактора 1.
Данное устройство имеет ограниченную область применения, а именно управление трактором на поворотной полосе. Управление же на рабочем гоне осуществляется вручную.
Наиболее близка по технической сущности и достигаемому эффекту к изобретению является система автоматизированного вождения машинно-тракторных агрегатов, содержащая датчики траекторной ошибки, положения направляющих колес и бокового крена трактора, связанные со схемой управ.ления движением на рабочем гоне, датчик положения рабочих органов, связанный с переключателем режимов управления, датчик скорости, связанный через тактовый генератор с программным блоком, схемы стабилизации положения направляющих колес и регулировки величины и интенсивности управляющего воздействия, .связанные с переключателем режимов управления, и
усилитель, связанный своими выходами с исполнительными механизмами поворота направляющих колес 2.
Недостатком известной системы является
необходимость вмещательства водителя в процесс автоматического вождения для перевода рабочих органов и щупа-копира в рабочее положение после завершения поворота и для выглубления рабочих органов перед началом поворота.
Цель изобретения - повышение эффективности использования системы за счет автоматизации управления рабочими органами.
Указанная цель достигается тем, что
в систему введены исполнительные механизмы с усилителями для выглубления рабочих органов, подъема и опускания копирующего механизма, связанные с программным блоком, и исполнительные механизмы с усилителями для заглубления рабочих органов
и поворота копирующего механизма, связанные с переключателем режимов управления, а также тем, что программный блок снабжен тремя одновибраторами, связанными своими выходами с усилителями выглубления рабочих органов, подъема и опускания копирующего механима, селекторами-мультиплексорами и постоянными запоминающими устройствами в количествах, равных числу элементов программы поворота, и логической схемой, при этом входы одновибраторов связаны через триггер с переключателем режимов управления, управляющие входы постоянных запоминающих устройств подключены к переключателю программ поворота, а выходы - к первым входам селекторов-мультиплексоров, вторые входы которых соединены с выходами счетных, декад, причем входы логической схемы подключены к выходному дешифратору, а выходы через логические элементы И и ИЛИ связаны с усилителями поворота направляющих колес трактора, а также тем, что логическая схема состоит из логических элементов НЕ, подключенных к выходному дешифратору программного блока, при этом вход первого элемента соединен со вторым выходом дешифратора, вход второго элемента НЕ - с третьим выходом дешифратора и с выходом первого элемента НЕ, вход третьего элемента НЕ - с пятым выходом дешифратора и с выходом второго элемента НЕ, вход четвертого элемента НЕ - с выходами третьего и шестого элементов НЕ и с шестым выходом дешифратора, вход пятого элемента НЕ - с третьим выходом дешифратора, вход шестого элемента НЕ - с выходо{« пятого элемента НЕ и с четвертым выходом дешифратора, а выходы четвертого и шестого элементов через логические элементы ИЛИ и И связаны с усилителями исполнительных механизмов поворота направляющих колес трактора.
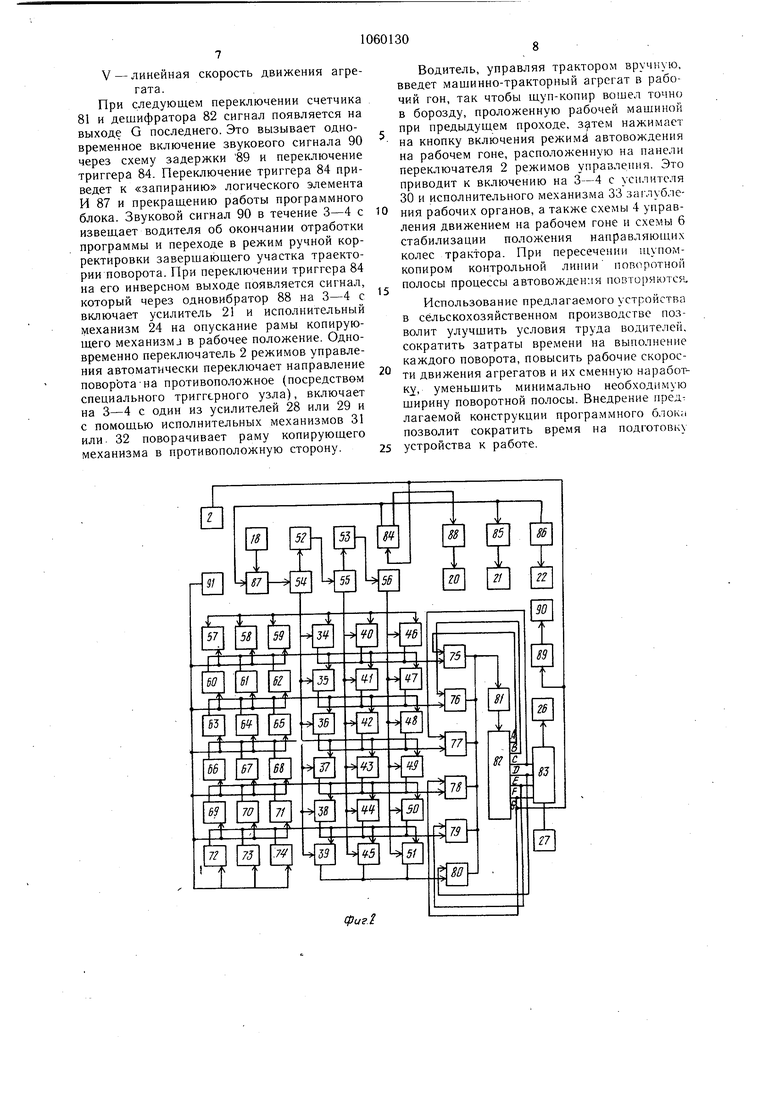
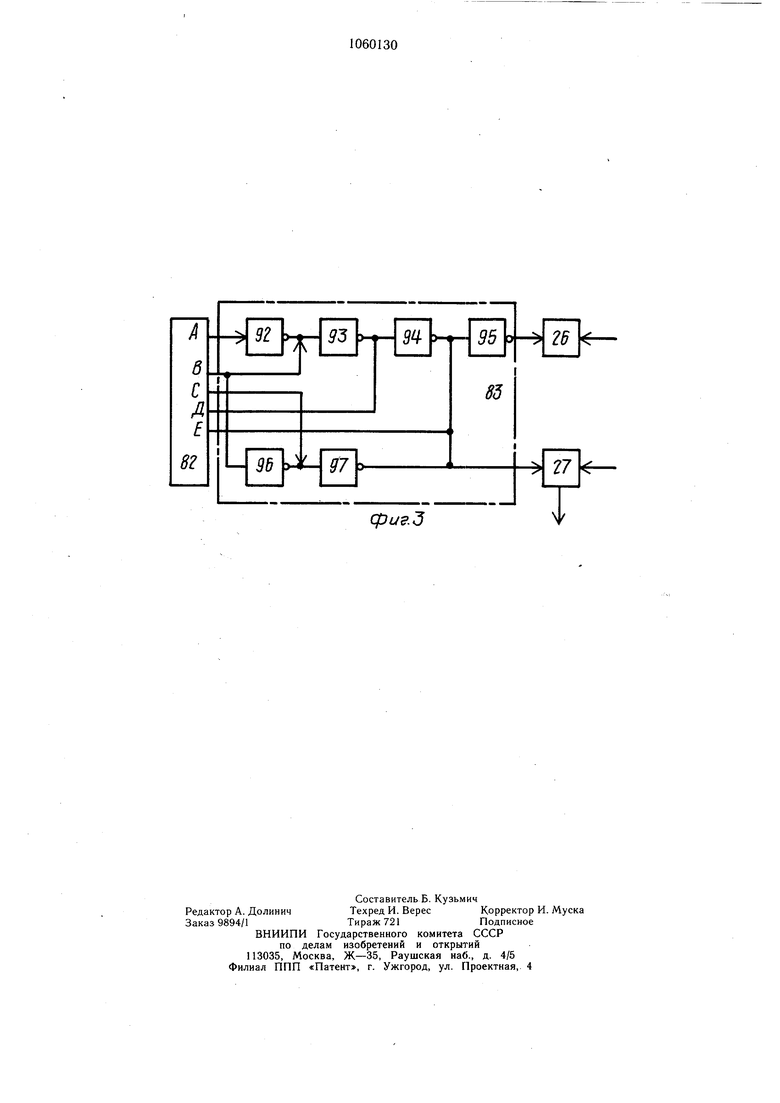
На фиг. 1 приведена блок-схема системы; на фиг. 2 - схема программного блока; на фиг. 3 - логическая схема управления поворотом направляющих колес трактора на поворотной полосе.
Система содержит программный блок 1, связанный с переключателем 2 режимов управления, усилители и исполнительные механизмы 3, а также схему 4 управления движением на рабочем гоне, связанную с переключателем 2 режимов управления и с логическим элементом ИЛИ 5, и схему 6 стабилизации направляющих колес, которая через второй вход логического элемента ИЛИ 5 связана с переключателем 2 режимов управления, схему 7 ограничения максимального угла поворота направляющих колес, связанную с переключателем 2 режимов управления, через четыре логических элемента И 8-11, и усилители 12 и 13 с исполнительными механизмами 14 и 15 поворота направляющих колес.
Частотно-импульсный регулятор 16, связанный со вторыми входами первых двух логических элементов И 8 и 9 .и с датчиком 17 скорости, имеющим связь через тактовый генератор 18 с программным блоком 1. Датчик 19 положения рабочих органов связан с переключателем 2 режимов управления. Программный блок 1 через усилители 20, 21 и 22 связан с исполнительными механизмами 23, 24 и 25 подъема и опускания рамы копирующего механизма, выглубления рабочих органов, через два логических элемента ИЛИ 26, 27 - со вторыми входами двух логических элементов И 10 и 11, а переключатель 2 режимов управления через усилители 28,29 и 30 связан с исполнительс ными механизмами 31, 32 и 33 поворота рамы копирующего механизма и заглубления рабочих органов машины и со вторыми входами двух логических элементов ИЛИ 26 и 27.
Программный блок 1 содержит три груп0 пы по шесть селекторов-мультиплексоров 34-39, 40-45, 46-51, в каждой группе их первые входы соединены между собой и с выходами одного из трех, последовательно включенных через дещифраторы 52 и 53
, счетчиков импульсов 54, 55 и 56, вторые входы соединены с выходами схем постоянных запоминающих устройств 57-74, а выходы соединены с входами логических элементов 4И 75-80, объединяющими селекторы-мультиплексоры по одному из каждой
0 группы 34; 40,46; 35, 41, 47; 36, 42, 48; 37, 43, 49; 38,44, 50 и 39, 45, 51, выходы которых (логических элементов 4И) соединены между собой и с входом четвертого счетчика импульсов 81 с дешифратором 82, причем первые шесть выходов последнего соединены с четвертыми входами логических элементов 4И 75-80 и с логической схемой 83 управления усилителями 12 и 13 исполнительных механизмов 14 и 15 поворота направляющих колес трактора, седьмой выQ ход дешифратора 82. соединен с переключателем 2 режимов управления, с триггером 84, прямой выход которого соединен через одновибраторы 85 и 86 с усилителями 21 и 22 подъема рамы копирующего механизма и рабочих органов машины и с логическим
5 элементов И 87, проводящим сигналы от тактового генератора 18 к счетчику импульсов 54, а инверсный - через одновибратор 88 сусилителем 20 опускания рамы копирующего механизма, и через схему задержки 89, с звуковым генератором 90; управляющие входы постоянных запоминающих устройств 57-74 соединены с переключателем 91 программ поворота.
Логическая схема 83 состоит из шести последовательно включенных в две группы
5 логических элементов НЕ 92-95 и 96, 97, реализующих универсальную блок-схему рациональных видов поворотов.
С обеих сторон поля отбиваются контрольные линии поворотной полосы. Первый проход на рабочем гоне выполняется при
0 ручном управлении, рама копирующего механизма опущена в рабочее положение. В момент пересечения щупом-копиром контрольной линии поворотной полосы водитель включает посредством переключателя 2 режимов управления режим автоматического управления движением на поворотной полосе. Это приводит к поступлению на вход триггера 84 управляющего сигнала. Триггер 84
переключается, сигнал с прямого выхода «открывает логический элемент И 87 для прохождения счетных импульсов от тактового генератора 18, через одновибраторы 85 1 86 включает исполнительные механизмы 24 д 25 подъема рамы копира и выглубления рабочих органов, причем одновибраторы 85 и 86 обеспечивают длительность управляющего сигнала порядка 3-4 с, достаточную для отработки указанных команд.Поступление счетных импульсов от тактового генератора 18 на вход счетчика импульсов 54 приводит к началу отсчета бортового времени поворота. Счетчик импульсов 54 передает двоичный код на входы селекторов-мультиплексоров 34-39, одновременно этот же код дешифратором 52 преобразуется в десятичный и каждый десятый импульс поступает на вход счетчика импульсов 55. С выхода счетчика импульсов 55 двоичный код подается на входы селекторов-мультиплексоров 4045 и дешифратора 53. Каждый десятый импульс от дешифратора 53 поступает на вход счетчика импульсов 56. С выхода счетчика импульсов 56 двоичный код поступает на входы селекторов-мультиплексоров 46-51. Одновременно переключатель 91 выдает управляюш,ие сигналы на вход схем постоянных запоминающих устройств 57-74. Это приводит к выводу на их выходы чисел в двоичном коде, соответствующих заданной программе. Код чисел программы выдается на вторые входы селекторов-мультиплексоров 34-51. В момент совпадения кодов постоянных запоминающих устройств 57-74 и счетчиков импульсов 54-56 селекторымультиплексоры 34, 40 и 46 выдают импульсы на соответствующие три входа логического элемента 4И 75, селекторы-мультиплексоры 35, 41, 47 - на входы логического эле,мента 4И 76, селекторы-мультиплексоры 36, 42, 48 - на входы логического элемента 4И 77, селекторы-мультиплексоры 37,43, 49 - на входы логического элемента 4И 78, селекторы-мультиплексоры 38, 44, 50 - на входы логического элемента 4И 79 и селекторы-мультиплексоры 39, 45, 51 - на входы логического элемента 4И 80. В начальный момент счетчик импульсов 81, следовательно и дешифратор 82, были установлены в нулевое положение и сигнал с выхода А дешиф-. ратора 82 подавался на четвертый вход логического элемента 4И 75. Вследствие этого, при поступлении импульсов от селекторов-мультиплексоров один только логический элемент 4И 75 может пропустить «суммарный импульс на свой выход. Выходы логических элементов 4И 75-80 соединены между собой и с входом счетчика импульсов 81, поэтому при появлении на одном из них импульса счетчик 81 и дешифратор 82 переключаются в следующее положение.Это приводит к подаче сигнала разрешения на четвертый вход логического элемента 4И 76
И ожиданию следующего совпадения импульсов от селекторов-мультиплексоров 35, 41 и 47. Одновременно сигнал от дешифратора 82 передается логической схеме 83. При поступлении сигнала с выхода А дешифратора 82 на первый вход логической схемы 83 логические элементы НЕ 92-95 пропускают его на вход усилителя 12 исполнительного механизма поворота направляющих колес трактора вправо. При следующем переключеНИИ дешифратора 82 сигнал с выхода В поступает на второй вход логической схемы 83,что приводит к блокировке логического элемента НЕ 92 и выключению усилителя 12, одновременно сигнал подается на вход цепочки логических элементов НЕ 96 и 97, что приводит к включению усилителя 13 исполнительного механизма поворота направляющих колес влево. Следующее переключение дещифратора 82 приводит к подаче сигнала с выхода С на третий вход логи0 ческой схемы 83, что приводит к блокировке логического элемента НЕ 96 и отключению усилителя 13. Подача сигнала на четвертый вход логической схемы 83 приводит к включению через логические элементы НЕ 94,95 усилителя 12, на пятый вход - блокировке
логического элемента НЕ 96, отключению усилителя 12 и включению усилителя 13. Поочередное включение и выключение усилителей 12 и 13 через заданные программой интервалы времени приводит к повороту
,. направляюш,их колес вправо или влево, к сохранению их положения в течение заданного времени, т. е. к реализации универсальной схемы управления движением на поворотной полосе.
5 Одновременно с отработкой программы машинно-тракторный агрегат движется по траектории поворота. Датчик 17 линейной скорости выдает электрические импульсы на входы тактового генератора 18 и частотно-импульсного регулятора 16. Электрическая схема тактового генератора 18 усиливает сигналы от датчика 17 скорости, формирует прямоугольные импульсы и делит их на 147 (это число обусловлено конструкцией трактора МТЗ-80/82 и передаточным отношением
5 главной передачи его заднего моста).
Преобразованные описанным образом сигналы датчика 17 скорости поступают на вход программного блока 1. При изменении линейной скорости движения трактора изме0 няются частота импульсов на входе программного блока 1 и интенсивность отработки программы, при этом соблюдается соотнош ние:
At 0,5V,
где At - единица измерения бортового времени (период подачи импульсов с выхода тактового генератора 18); V - линейная скорость движения агрегата. При следующем переключении счетчика 81 и дешифратора 82 сигнал появляется на выходе G последнего. Это вызывает одновременное включение звукового сигнала 90 через схему задержки 89 и переключение триггера 84. Переключение триггера 84 приведет к «запиранию логического элемента И 87 и прекращению работы программного блока. Звуковой сигнал 90 в течение 3-4 с извещает водителя об окончании отработки программы и переходе в режим ручной корректировки заверщающего участка траектории поворота. При переключении триггера 84 на его инверсном выходе появляется сигнал, который через одновибратор 88 на 3-4 с включает усилитель 21 и исполнительный механизм 24 на опускание рамы копирующего механизм J в рабочее положение. Одновременно переключатель 2 режимов управления автоматически переключает направление поворота-на противоположное (посредством специального триггерного узла), включает на 3-4 с один из усилителей 28 или 29 и с помощью исполнительных механизмов 31 или 32 поворачивает раму копирующего механизма в противоположную сторону. Водитель, управляя трактором вручную, введет мащинно-тракторный агрегат в рабочий гон, так чтобы щуп-копир вошел точно в борозду, проложенную рабочей машиной при предыдущем проходе, нажимает на кнопку включения режимй автовождения на рабочем гоне, расположенную на панели переключателя 2 режимов управления. Это приводит к включению на 3-4 с усилителя 30 и исполнительного механизма 33 заглубления рабочих органов, а также схемы 4 управления движением на рабочем гоне и схемы 6 стабилизации положения направляющих колес трактора. При пересечении щупомкопиром контрольной линии поворотной полосы процессы автовожденмя повторяются.. Использование предлагаемого устройства в сельскохозяйственном производстве позволит улучщить условия труда водителей, сократить затраты времени на выполнение каждого поворота, повысить рабочие скорости движения агрегатов и их сменную наработку, уменьшить минимально необходимую ширину поворотной полосы. Внедрение предлагаемой конструкции программного блока позволит сократить время на подготовку устройства к работе.
ф.Л
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления движением трактора | 1980 |
|
SU873908A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3373308, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
