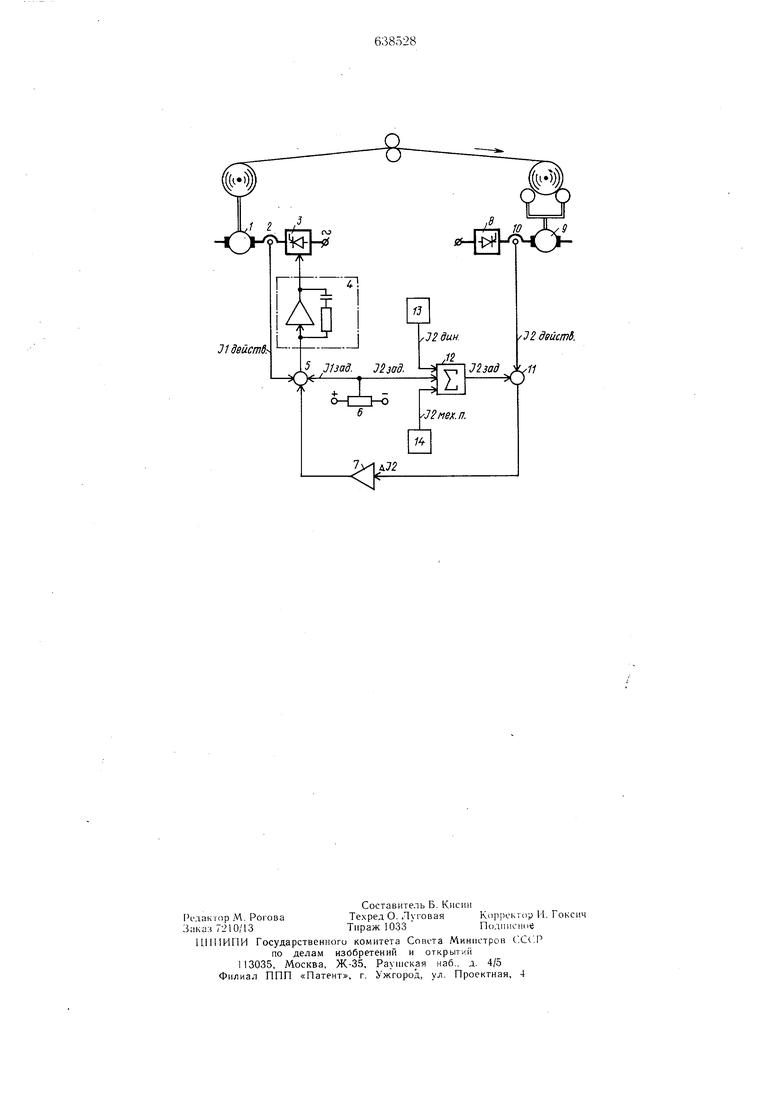
ка 11 сравнения действительной и заданной величин тока двигателя механизма намотки, входы сумматора 12 соединены с выходом блока 13 задания динамической составляющей тока двигателя механизма намотки (Ь дин.) и выходом блока 14 задания составляющей тока .механических потерь (J; мех. пот.), а также с выходом задатчика 6 натяжения, а выход сумматора 12 связан со вторым входо.м блока 11 сравнения, выход которого через усилитель 7 соединен со входом блока 5 сравнения системы 4 регулирования тока тормозного генератора 1. Устройство работает следуюпи1м обраВ системе управления электродвигателя 9 механизма намотки производится сравнение заданного тока якоря двигателя с действительной величиной тока. Заданная ве.тичина тока двигателя Ь зад. образуется из суммы трех составляющих. Первая составляющая la нат. определяет величину тока, необходимую для создания натяжения полотна в режиме установивщейся скорости, и устанавливается задатчиком 6 натяжения. Вторая составляющая 1г мех. пот определяет величину тока двигателя, обеспечивающую преодоление момента механических потерь в .механизме намотки. Эта составляющая устанавливается в блоке 14 для каждого конкретного станка. Третья составляющая Ь дин. обеспечивает разгон или замедление инерционных масс механизма намотки и подается на вход сумматора 12. Величина сигнала динамической составляющей Ь дин. пропорциональна ускорению станка и .моменту инерции наматывающего устройства. В установившемся режиме перемотки, т. е. при неизменной скорости движения полотна, устанавливается равенство сигналов Ь зад. Ь нат. + L мех.п. и , действ, для всех величин натяжения. В режиме разгона и замедления на вход сумматора 12 подается дополнительный сигнал 1г дин. При подаче этого сигнала на выходе блока 11 сравнения появится сигнал рассогласования Д1г, равный разнице между Ь зад. Ь нат. Ч-Ь мех. п. -flгдин. и h действ. Этот сигнал через усилитель 7 подается на вход блока 5 сравнения регулятора 4 тока тормозного генератоpa 1. Полярность сигнала Д1г выбирается такой, чтобы при совместном действии с сигналом задания тока Ii зал. тормозного генератора 1 на выходе блока 5 сравнения появился корректирующий сигнал, увеличивающий (при замедлении) или уменьшающий (при разгоне) момент тормозного генератора 1 до такого значения, при котором устанавливается равенство токов з;1Д. Iz действ, в электродвигателе 9 ме.а 1изма намотки, т. е. восстанавливается заданное натяжение полотна на намоточном устройстве. Конструкция устройства обеспечивает повышение точности по.ддержания натяжения и сокращение времени разгона и замедления установки. Сокращение производительного времени разгона и замедления дополнительно увеличивает производительность установки особенно в тех случаях, когда по технологическому процессу предусматривается большое количество разгонов и замедлений с рулоном материала (например, в продольно-резательных станках для резки бумаги или картона в бумагоделательной промышленности). Формула изобретения Устройство для автоматического регулирования натяжения длинномерного материала при перемотке, содержащее датчик тока якоря тормозного генератора механизма размотки, связанный с первым входом первого блока сравнения, второй вход которого соединен с задатчиком натяжения, а выход - с регулятором тока тормозного генератора, датчик тока якоря электродвигателя механизма намотки, подключенН1 1Й к первому входу второго блока сравнения, отличающееся тем, что, с целью повышения точности стабилизации натяжения при минимальном времени переходных процессов, оно имеет сумматор, блоки задания составляющей тока механических потерь и динамической составляющей тока якоря электродвигателя механизма намотки, при этом входы сумматора соединены с выходами блоков задания составляющей тока механических потерь и динамической составляющей тока якоря электродвигателя механизма намотки и с выходом задатчика натяжения, а выход сумматора связан со вторым входом второго блока сравнения, выход которого соединен с третьим входом первого блока сравнения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования натяжения полосового материал | 1976 |
|
SU568471A1 |
| Устройство управления изгибно-растяжным агрегатом | 1981 |
|
SU998526A1 |
| Система для программного управления правильной машиной | 1986 |
|
SU1327065A1 |
| Устройство для управления аккумуля-TOPOM пОлОСы | 1979 |
|
SU814499A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Способ управления автономнымэлЕКТРОпРиВОдОМ пОСТОяННОгО ТОКАгРузОпОд'ЕМНОгО МЕХАНизМА и уСТРОйСТВОдля ЕгО РЕАлизАции | 1979 |
|
SU843139A1 |
| Система управления параметрами движения полосового и пленочного материала | 1986 |
|
SU1471237A1 |
| Электропривод постоянного тока | 1985 |
|
SU1332501A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Устройство для автоматического регулирования натяжения длинномерного материала при перемотке | 1985 |
|
SU1341138A1 |