1
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Целью изобретения является повы- шение качества регулирования.
На чертеже приведена схема системы управления.
Система управления содержит механизм 1 раската, главный приводной механизм 2, механизм 3 наката, автоматические системы 4-6 регулировани соответственно натяжения на раскате скорости и натяжения на накате, прО граммный задатчик 7.
Система 4 регулирования натяжения на раскате включает последовательно соединенные первый задатчик 8 натяжения, первую схему 9 сравнения, первый регулятор 10 натяжения, вторую схему 11 сравнения, первый регулятор 12 частоты вращения, третью схему 13 сравнения, первый регулятор 14 тока, первый преобразователь 15, первый датчик 16 тока к первый электродвигатель 17 первый датчик 18 натяжения, первый датчик 19 частоты вращения, причем выходы датчиков 18, 19 и 16 натяжения, частоты вращения и тока.подключены к вторьм входам соответственно первой второй 11 и третьей 13 скем сравнения.
Система 6 регулирования натяжения на накате включает последовател но-соединённые второй задатчик 20 натяжения, четвертую схему 21 сравнения, второй регулятор 22 натяжения, пятую схему 23 сравнения, второй регулятор 24 частоты вращения, шестую схему 25 сравнения, второй
регулятор 26 тока5 второй преобразователь 27, второй датчик 28 тока и второй электродвигатель 29, второй датчик 30 натяжения, второй датчик 31 частоты вращения, причем выходы датчиков 30, 31 и 28 подключены к входам схем 21, 23 и 25 сравнения, систему 5 регулирования скорости, включающую последовательно соединенные седьмую схему 32 сравнения, к первому входу которой подключен выход задания скорости программного задатчика 7, регулятор 33 скорости, восьмую схему 34 сравнения, третий регулятор 35 тока, третий 36 преобразователь, третий датчик 37 тока и третий электродвигатель 38, датчик 39 скорости и датчик 37 тока, выходы которых подключены к вторым входам седьмой и восьмой схем 32 и 34 срав нения, первый и второй счетчики 40 и 41 слоев, входы которых подключены к выходам соответственно первого и второго датчиков 19 и 31 частоты вращения, первый и второй блоки 42 и 43 параметрической коррекции, первые и вторые входы которых соединены с выходами соответственно задания скорости и ускорения программного задатчика 7, а третьи входы подключены к выходам соответственно первог и второго счетчиков 40 и 41 слоев, первый и второй выходы первого блока 42 параметрической коррекции соединены с третьими входами соответственно второй и третьей схем 11 и 13 сравнения, первый и второй выходы втрого блока из параметрической коррек ции соединены с третьими входами сооветственно пятой и шестой схем 23
и 25 сравнения, причем блоки 42 и 43 параметрической коррекции реализуют следующие функциональные зависимости:
а)
,.(|;l.C,R3)f.(,R,)
R, .dt . Rt VA.(|f C,R3) + ф- C,R,)V
R( R,u- HN
R,
I s
RIH+
параметры частот задания, формируемые на первых выходах соответственно первого и второго блоков параметрической коррекции;
V
dV
dt
N , N
(
I,, I
R, ,Rj, АО В
-параметры задания скорости и ускорения;
-текущие значения числа слоев на раскате и накате;
2 - параметры задания токов
формируемые на вторых вы ходах соответственно пер вого и второго блоков параметрической коррекции;
текущие значения радиу- сов рулона;
) D,, AJ, Bj, С,
Dp,/, ,/3,
1Н Н
Н - константы.
При использовании блоков на базе цифровой техники система управления может содержать преобразователи код аналог 44 и частота - код 45,
Система управления работает еле- образом.
Процесс намотки или перемотки материала носит циклический характер., Длительность казкдого технсг- логического цикла определяется временем намотки рулона на накате. При этом циклограмма скоростного режима состоит из участка разгона, стабилизации скорости и торможения. Зкаче- ;Ния ускорения на участках разгона и торможения, а также значение скорости на участке стабилизации определяется видом материала, как правило
5
0
5
выбираются из соображений максимальной производительности и являются заданньп ш и повторяющимися от цикла к циклу параметрами. Основная задача электропривода - обеспечить при максимальной производительности стабилизацию натяжения материала на одном уровне на всех гчастках циклограммы процесса намотки или перемот- I ки. При этом следует учесть, что в
течение указанного цикла радиус рулона материала на раскате непрерывно уменьшается, а на накате - увеличи- ваетср. Последнее приводит к непрерывному изменению как частоты вращения рулонов, так и к изменению в широком диапазоне их моментов инерции, т.е. имеет место значительное изменение динамических параметров, а следовательно, и таких переменных координат как ток якоря и частота вращения двигателя частоты вращения двигателя на раскате:
. |-;
( V
накате 63, Рг „ .
(1) (2)
О
5
0
0
5
где V - скорость перемотки материала (по главному приводу) /, константы.
Текущие значения радиуса рулонов на раскате и на накате определяются как
R, R,H - HN, ; (3)
R, R,jy + HNjj (4)
где R,и RJH начальные значения радиуса рулонов на раскате и на накате; Н - толщина материала; N, и Ng - текущие значения числа оборотов (слоев) рулона на раскате и на накате. Динамический момент на валу двигателя определяется как
м 4 . м - 1 --- С) vlMHM J. dt AKH.I- Jzdt .
где jj, j - моменты инерции, приведенные к валу двигателя. Ускорение может быть выражено как dco.
а d ,V. P.VdR,
dt dt R- R,dt С учетом (3) и (4)
dco, P, dVfij.iHVf,
dt RT dt2 rR,
dUi Pz.dV J aiHV2
dt 57
(6)
(7) (8)
51471237
С учетом (5)-(8) и уравнения для эле-s ктромагнитного момента электродвигателя при постоянных магнитном потоке и статическом моменте нагрузки получаем
I,A,.(|i.C,R3) J.(|L.G,R,)VS 1 - t (д)
Система управления параметрами движения полосового и пленочного
(-- + CT.RJ) pf (pf G R2)V2+ 10материала, содержащая систему регуг„ (4р.лирования натяжения на раскате;
г fвключающую первый электродвигатель,
Текущие значения частоты вращенияякорная обмотка которого подключена
и тока якоря двигателей раската их первому преобразователю, последонаката связаны сложными функциональнь 15вательно соединенные первый задатчик
щего значения радиуса рулона при заданных значениях скорости и ускорения.
Формула изобретения
Система управления параметрами движения полосового и пленочного
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1983 |
|
SU1131810A2 |
| Устройство для регулирования натяжения длинномерного материала | 1987 |
|
SU1505875A1 |
| Устройство для регулирования натяжения материала при перемотке | 1979 |
|
SU856959A1 |
| Регулятор натяжения рулонных материалов | 1985 |
|
SU1366469A1 |
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1983 |
|
SU1151501A2 |
| Устройство для автоматического регулирования натяжения при намотке рулонного материала | 1988 |
|
SU1595774A1 |
| Устройство для регулирования скорости и натяжения длинномерного материала при перемотке | 1982 |
|
SU1043093A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Устройство для автоматического регулирования натяжения при перемотке ленточного материала | 1975 |
|
SU727546A1 |
| Автоматическая система управления намоткой бумажного полотна | 1989 |
|
SU1657561A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока. Целью изобретения является повышение качества регулирования. Система 4 регулирования натяжения на раскате включает задатчик 8 натяжения, первую схему сравнения, регулятор 10 натяжения, регулятор 12 частоты вращения, регулятор 10 тока. Система 6 регулирования натяжения на накатке включает задатчик 20 натяжения, второй регулятор 22 натяжения, регулятор 24 частоты вращения, регулятор 26 тока. Первые и вторые входы блоков 42, 43 параметрической коррекции соединены с выходами соответственно задания скорости и ускорения программного задатчика 7. Третьи входы блоков 42,43 подключены к выходам первого и второго счетчиков 40, 41 слоев. В счет специальных сигналов параметрической коррекции, задаваемых во время цикла перемотки на входы контуров регулирования. 1 ил.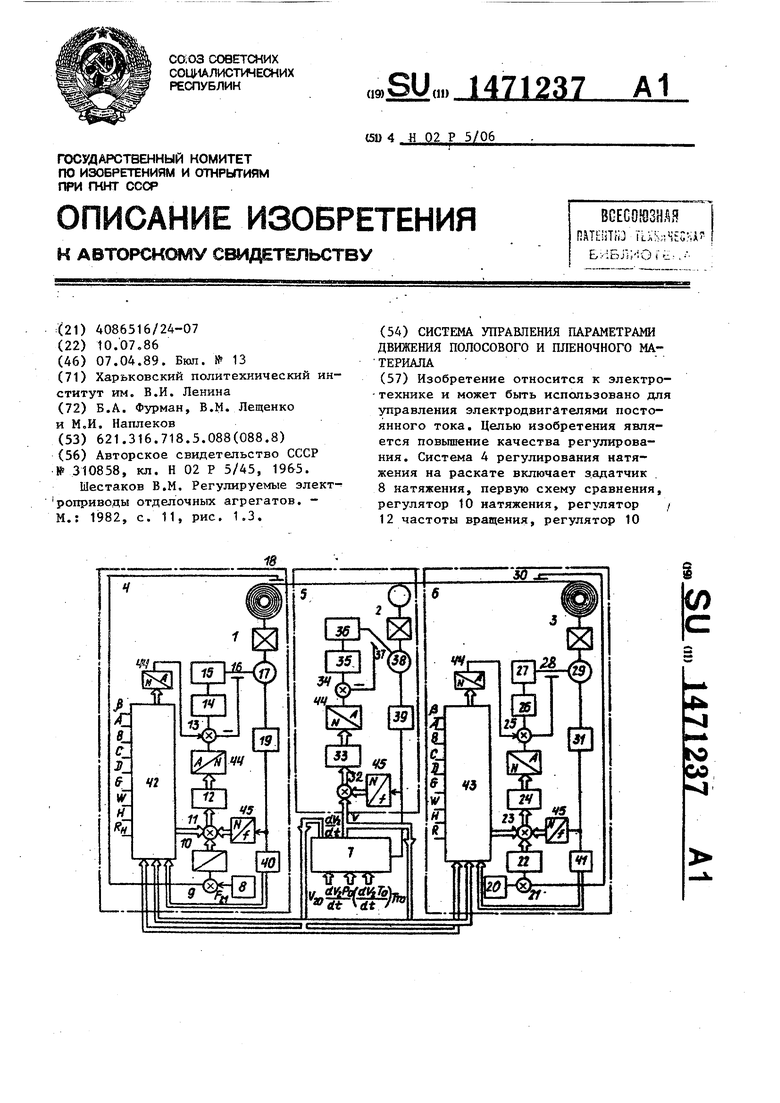
ми зависимостями с текущими значениями скорости перемотки, ускорения и радиуса рулона. Константыв упомянутьр соотношениях определяются видом мате риала, конструкцией механизмов и заданным значением натяжения движущегося материала.
При отсутствии устройств параметрической коррекции значительное изменение частоты вращения двигателей раската и наката в процессе перемотки материала (для реальных механизмо диапазон изменения частоты вращения достигнет 1:10) достигается за счет сигнала рассогласования, вырабатываемого в контуре регулирования натяжения, динамического изменения тока якоря, связанные с разгоном, тормо - жением, переменным характером инер- ционных масс и момента создающего натяжение, создаются за счет рассогласования, вырабатываемого в контуре регулирования частоты вращения. Оба обстоятельства затрудняют высококачественную стабилизацию натяжения материала. Применение больших значений коэффициентов усиления и интеграторов для уменьшения ошибки в внешнем контуре регулирования натя жения ограничено условиями устойчивости с учетом большого диапазона изменения значений переменных коэффициентов и сложностью трехконтур- ной структуры.
С целью повышения точности регулирования натяжения материала задани значений переменных координат CJ и I осуществляется не за счет ошибки контура регулирования натяжения, а за счет специальных сигналов пара-- метрической коррекции, задаваемых во время цикла перемотки на входы контуров регулирования частоты вращения и тока якоря в функции теку
натяжения, первую схему сравнения, первый регулятор натяжения, вторую схему сравнения, первый регулятор частоты вращения, третью схему cpasf нения5 первьй регулятор тока, выход которого подключен к входу первого преобразователяJ а также первые
датчик натяжения, датчик частоты вращения и датчик тока, выходы которых подю1ючены к вторым входам соответственно первой, второй и третьей схем сравнения, систему регулирования натяжения на накате, включающую второй электродвигатель, якорная обмотка которого подключена к второму преобразователю, последовательно соеди- ненные второй задатчик натяжения, четвертую схему сравнения, второй регулятор натяжения, пятую схему сравнения, второй регулятор частоты вращения, щестую схему сравнения, второй регулятор тока выход которого подключен к входу второго преобразователя,, а также вторые датчик натяжения.
датчик частоты вращения и датчик тока, выходы которых подключены к вторым входам соответственно четвертой, пятой и шестой схем сравнения, систему регулирования скорости перемот - ки, включающую третий электродвигатель, якорная обмотка которого подключена к третьему преобразователю, последовательно соединённые программный задатчик скорости и ускорения, седьмую схему сравнения, регулятор скорости перемотки, восьмую схему сравнения, третий регулятор тока, выход которого подключен к входу третьего преобразователя, а также датчик скорости перемотки и датчик тока, выходы.которых подключены к вторым входам соответственно седьмой и во сьмой схем сравнения, отличающаяся тем что, с целью пЬвышения качества регулирования, в нее введены первый и второй счетчики слоев, входы которых подключены к выходам соответственно первого и вто- рого датчиков частоты вращения, первый и второй блоки параметрической коррекции, первые и вторые входы которых соединены с выходами задания соответственно скорости и ускорения программного задатчика, а третьи входы подключены к выходам соответственно первого и второго счетчиков, первый и второй выходы первого блока параметрической коррекции соединены с третьими входами соответственно второй и третьей схем сравнения, первый и второй выходы второго блока параметрической коррекции соединены с третьими входами соответственно пя той и шестой схем сравнения, причем блоки параметрической коррекции реализуют следующие функциональные зави симости
-oY.
.
I.A.(,R3).(|.G,R)
СО.
rB-L
dt dV
l4-M(Sb.c,R;)2i.(||,G,RpV Ai
HN
R,
2«
HN
2
- параметры задания частоты вращения, формируемые на первых выходах соответственно первого и второго блоков параметрической коррекции;
R N
R.
-1
dt
1 -парамстры задания тока, фор- ьшруемые на вторых выходах соответственно первого и второго блоков параметрической коррекции;
-параметры задания скорости и ускорения, формируемые на выходах программного задатчика и первых и вторых входах блоков параметрической коррекции;
-параметры числа слоев, сма- тьтаемых на раскате и наматываемых на накате;
-текущие значения радиусов рулона;
A,,В,,C,, DI Rth PI ,Aj,Bj, CijDj Rjn f3i, to,,H
- константы.
| 0 |
|
SU310858A1 | |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ыестаков В.М | |||
| Регулируемые элект- роприводы отделочных агрегатов | |||
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
