(5k) УСТРОЙСТВО УПРАВЛЕНИЯ ИЗГИБНО-РАСТЯЖНЫМ АГРЕГАТОМ
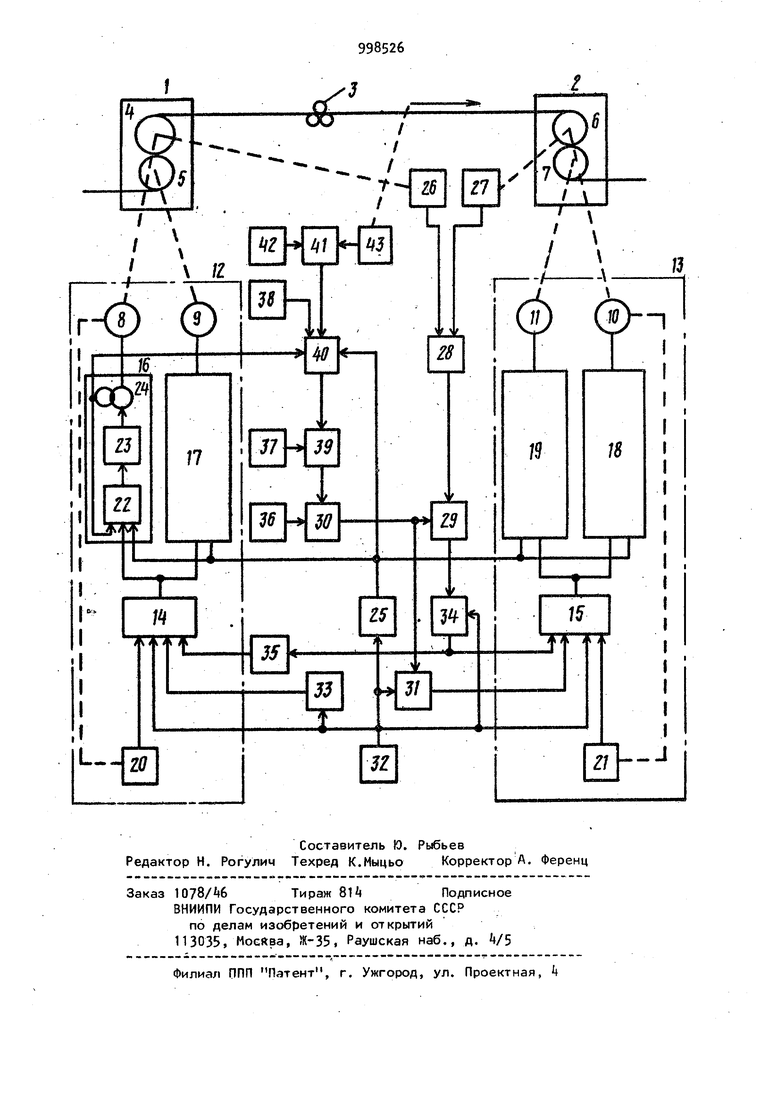
Изобретение относится к автоматизации прокатного производства и может ,быть использовано в системах автомати ческого управления растяжением металлической полосы на изгибно-растяжных агрегатах. Известно устройство правки полос комбинированным способом - растяжением И знакопеременным изгибом вокруг правильных роликов, в котором требуемое натяжение полосы создается двумя натяжными Станциями, установленными до и после изгибателя, представляющего собой группу правильных роликов. Привод натяжных станций осуществляется от одного электродвигателя постоянного тока через механическую передачу с использованием дифференциального редуктора. Величина пластической деформации, необходимая для коррекции неплоскостности полосы, поддерживается за счет создания разности скоростей вращения роликов, расположенных до и после изгибателя, с помощью вариатора и второго электродвигателя постоянного тока небольшой мацности, последний из них управляет дифференциальным редуктором . Недостатком данного устройства является низкая точность поддержания разности скоростей вращения тянущих роликов, а следовательно, и величины пластической деформации. .. . Наиболее близким к предлагаемому по технической сущности и достигаемому результату является устройство управления изгибно-растяжным агрегатом, содержащее изгиГатель и две группы тянущих роликов { натяжные станции), расположенные до и после изгибателяС Это устройство управления изгибиорастяжным агрегатом выполнено по схеме с индивидуальным приводом каждого тянущего ролика от отдельного электродвйгатепя. Поддержание требуемой величины пластической деформации (удлинения) осуществляется за счет создания разности скоростей вращения первого и второго тянущих роликов, расположенных непосредственно до и после йзгибателя. Система регулирования скорости вращения каждого из этих роликов построена по принципу подчиненного регулирования и состоит из внешнего ко тура регулирования скорости и подминенного ему контура регулирования тока якоря двигателей, от которых осуществляется привод тянущих роликов натяж- . ной станции. Каждый внешний контур peгyлиpo8an 15 ния скорости включает в себя регуля.тор скорости, на входе которого сигнал с выхода измерителя ско|Х)сти тянущего ролика (цифровая коррекция де ствительного значения 1 сравнивается , С сигналом задания опорной скорости Кроме того, на вход регулятора скорости второго тянущего .ролика цифровая коррекция действительного значения сравнивается с сигналом задания опорной скорости. Кроме того, на вход регулятора скорости второго тянущего ролика подается сигнал задания разности ско ростей роликов в соответствии с величиной требуемого удлинения. Для перераспределения нагрузки между роликами, входящими в натяжную станцию, выходной сигнал регулятора скорости подается одновременно на вход двух контуров регулирования тока якоря двигателей, от которых осуществляется привод данных тянущих роликов. Для компенсации инерционных масс двигателей и роликов в периоды разгона и торможения на вход контуров регулирования тока подается сигнал пропорциональный ускорению движения полосы. Контур регулирования тока якоря каждого двигателя поддерживает необходимое для заданного удлинения натя жение полосы, момент (на валу тянущего ролика и включает в себя датчик тока, регулятор тока и тиристорный преобразователь. Повьшенная точность поддержания заданной разности скоростей роликов в этом устройстве обусловлена наличием сканирующего узла, который осуществляет контроль за удлинением полосы и выдает сигнал на вход регуляторов скорости, корректирующий сигнал задания разности скоростей тянущих роликов. Сканирующий узел содержит два импульсных датчика скорости ( генераторы импульсов), которые механически связаны соответственно спервым и вторым тянущими роликами. Выходные сигналы с импульсных датчиков скорости поступают на вход измерителя удлинения (реверсивные счетчики, управляемые микропроцессором. В измеритель удлинения входит таюке узел, осуществляющий коррекцию результата измерения по отношению метров Первого и второго тянущих роликов. На выходе измерителя удлинени/1 формируется сигнал, пропорциональный относительной разности линейных скоростей (удлинения) первого и второго тянущих роликов. Измеренное значение удлинения с выхода измерителя удлинения поступает на блок сравнения, где сравнивается с заданным значениемудлинения, поступающим с выхода задатчика удлинения. Сигнал рассогласования между заданным и изме ренным удлинением с выхода блока сравнения поступает на вход регулятора удлинения .(последовательное соединение цифроаналогового умножителя и пи-регулятораJ и с его выхода поступает на вход регулятора скорости второго тянущего ролика и в противофазе (через инвертор) на вход регулятора скорости первого тянущего ролика. Так как время измерения измерителя удлинения зависит от скорости перемещения полосы, то время изодрома регулятора удлинения регулируется выходным сигналом задатчика опорной скорости (обратно пропорционально скорости перемещения полосы). Выходной сигнал регулятора удлинения корректирует сигнал задания разности скоростей тянущих роликов, который формируется на выходе блока умножения (цифроаналоговый умножитель). На первый вход блока умножения с выхода задатчика удлинения подается сигнал, пропорциональный относительной разности линейных скоростей первого и второго тянущих роликов, а на второй вход подается сигнал задания опорной скорости с выхода задатчика опорной скорости. В данном устройстве предусмотрена коррекция сигнала задания разности скоростей первого и второго,тянущих роликов с учетом отношения их диаметров. Сигнал коррекции формируется на выходе блока коррекции по отношению диаметров роликов и подается на вход регулятора скорости первого тяHjmjero ролика (последовательное соединение формирователя ртноситель-но разности диаметров роликов и цифроаналогового умножителя) 2. Однако известное устройство имеет недостаточную томность поддержания требуемой величины пластической деформации, обусловленнуюлогрешностью вносимой упругой деформацией полосы, которая в данном устройстве не учитывается. Цель изобретения - повышение точности поддержания требуемой .величины пластической деформации. Поставленная цель достигается тем чтю в устройство управления изгибнорастяжным агрегатом, включающим две группы тянущих роликов с индивидуальным приводом от двигателей постоянного тока, первая группа которых расположена до изгибателя и непосредственно перед ним содержит первый тянущий ролик, вторая группа рас положена после изгибателя и непосредственно после него содержит второй тянущий ролик, содержащее задатмик удлинения полосы, первые и вторые импульсные датчики, первые и вто рые, измерители скорости, механически связанные с первым и вторым тянущими роликами соответственно, регуляторы тока якоря приводных двигателей первого и второй групп тянущих роликов, первые входы которых соединены с выходами первого и второго регуляторов скорости соответственно, вторые входы - с выходом блока дифференцирования, а третьи входы - с выходами датчиков тока якоря соответствующих двигателей, первые входы первого и второго регуляторов скорости подключены к выходам соответствующих измерителей,скорости, вторые входы к выходу задатчика скорости, соединенного с входами блоков коррек- циипо отношению диаметров роликов и дифференцирования, с первыми входами блока умножения и регулятора удл1 нения, выходы блока коррекции по отношению диаметров роликов и блока ушожения соединены соответственно с третьими входами первого и второго регуляторов скорости, четвертый вход первого регулятора скорости через инвертор, а второго непосредственно соединены с выходом регулятора удлинения , .подключенного вторым входом к выходу блока сравнения, первый вход которого соединен с выходом измерителя удлинения полосы, связанного входами с выходами импульсных датчиков скорости, введены между первым тянущим роликом и изгибателем первый измеритель натяжения полосы, между изгибателем и вторым тянущим роликом второй измеритель натяжения полосы, блок вычитания, входы вычитаемое и уменьшаемое которого соединены с выходами первого и второго измерителей натяжения -.соответственно первый суммирующий блок, первый, второй, третий и четвертый входы которого подсоединены к выходам блоков вычитания, дифференцирования, зада- . ния опорного напряжения и датчика тока якоря приводного двигателя первого тянущего ролика соответственно, блок деления, входы делимое и делитель которого соединены с выходами первогосуммирующего блока и задатчика сечения полосы соответственно, второй суммирующий блок, первый и второй входы которого подсоединены к выходам блока деления и задатчика удлинения полосы соответственно, а выход - к вторым входам блоков сравнения и умножения. На чертеже приведена структурная схема устройства во взаимосвязи с автоматизируемым участком изгибно-расгп тяжного агрегата для варианта, когда агрегат содержит четыре тянущих ролика. Устройство содержит натяжные станции 1 и 2, расположенные, соответственно, до и после изгибателя .3. В каждую станцию 1 и 2 входит по два тянущих ролика 4, 5 и 6, 7 каждый из которых имеет индивидуальный привод от соответствующего двигателя 8-11 постоянного тока. Скорость врацения роликов натяжных станций 1 и 2 поддерживается системами 12 и 13 автоматического регули(эования скоростей, которые построены по принципу подчиненного регулирования и содержат регуляторы 1 и 15 скорости, контуры 16-19 и измерители 20 и 21 скорости вращения двигателей 8 и 1 0. 7 Входы регуляторов Н и 15 скорост соединены с выходами измерителей 20 21 скоростей соответственно. Измерители 20 и 21 имейт механическую связь с валами двигателей 8 и 10. KO тур 16 регулирования тока якоря двигателя 8 содержит последовательно соединенные регулятор 22 тока и тиристорный преобразователь 23. В цепи обратной связи включен датчик 2 тока якоря двигателя. Первый вход регулятора 22 тока со динен с выходом регулятора 1A скорости, второй вход - с выходом блока 2 дифференцирования, третий - с выходо датчика 2Ц тока якоря двигателя 8. Контуры 17-19 регулирования тока содержат такие же элементы, что и в контуре 16 и имеют аналогичные связи Устройство содержит также первый 26 ивторой 27 импульсные датчики скорости, механически связанные с тя нущими роликами и 6 соответственно, измеритель 28 удлинения полосы, подключенного входами к выходам импульсных датчиков 26 и 27 скорости, блок 29 сравнения, первый вход которого соединен с выходом измерителя 28 удлинения, а второй вход - с выхо дом второго суммирующего блока 30 и вторым входом блока 31 умножения, первый вход которого подключен к вых ду задатчика 32 скорости, соединенHord также с входами блока 25 диффе ренцирования, блока 33 коррекции по отношению диаметров роликов и первым входом регулятора 3 удлинения полосы, второй вход которого соединен с выходом блока 23 сравнения, а выход через инвертор 35 - непосредственно с четвертными входами регуляторов 1 и 15 скорости соответственно, третьи входы регуляторов 1t и 15 скорости соединены с выходами бло ка 33 коррекции по отношению диаметров роликов и блока 31 умножения соответственно. Имеются в устройстве задатчики 36 и 37 удлинения и сечения полосы соответственно и блок ЗЗ задания опорного напряжения. Выход задатчика 36 удлинения полосы соединен с вторым входом второго суммирующего блока 30, выход задатчика 37 сечения полосы - с входом делитель блока 39 деления, вход д лимое которого соединен с выходом первого суммирующего блока 0, первый, второй, третий и четвертый вхо6ды которого соединены соответственно с выходами блока 1 вычитания,-блока 25 дифференцирования, блока 38 задания опорного напряжения и датчика 2k TOKai якоря двигателя 8, при этом вход вычитаемое блока k1 вычитания соединен с выходом первого измерите я 2 натяжения полосы, установленного между первым тянущим роликом k и изгибателем 3, вход уменьшаемое блока 1 подключен к выходу второго измерителя 3 натяжения по-, лосы, установленного между изгибателем 3 и вторым тянущим роликом 6. Регуляторы 1 и 15 скорости и регулятор 22 тока представляют собой последовательно соединенный узел сравнения и Т1И-регулятор. Задатчик скорости 32 может выполняться в виде задатчика интенсивности. ДатчИк 24 тока может быть любой. Задатчик 37 сечения может выполняться в виде аналогового умножителя, на один вход которого подается напряжение, пропорционапьное толщине, а на другой входнапряжение, пропорциональное ширине полосы. Измерители k2 и. 3 натяжения могут выполняться в виде роликов, имеющих контакт с полосой, и силоизмерительных датчиков, измеряющих давление со стороны полосы на контактные ролики. Если натяжение полосы на участке между тянущими роликамиi и 6 обеспечивается-толькоза счет натяжных станций 1 и 2 (т.е. .натяжение полосы на входе натяжной станции 1 и выходе натяжной станции 2 отсутствует то в качестве измерителей k2 натяжения можно применить, соответственно, измеритель суммарного статического момента на валу тянущих роликов 5 и (6 и 7). Блок 33 коррекции по отношению диаметров роликов представляет собой последовательное соединение формирователя относительной разности диаметров тянущих роликов 5 и и цифроаналогового умножителя. Инвертор 35, блок 25 дифференцирования, блок 41 вычитания, первый суммирующий блок 40 могут реализоваться по любой известной схеме, например, с использованием операционных усилителей. Выполнение блоков 29, 31 и 39 сравнения, умножения и деления соот99ветственно, второго суммирующего блока 30, регулятора З удлинения и эадатчика 36 удлинения зависит от типа применяемого измерителя 28 удлинения. При реализации измерителя 28 удлинения по схеме цифрового измерителя регулятор 3 удлинения может выполйяться с включением на его входе цифроаналогового преобразователя, при этом блок 31 умножения представляет цифроаналоговый умножитель (последовательное соединение цифроаналогового преобразователя и аналогового умножителя). Задатчик 36 удлинения может выполняться так, чтобы на его выходе формировался сигнал задания в виде соответствующего кода. Блок 39 деления представляет собой последовательное -соединение аналогового делительного устройства и аналого-цифрового преобразователя. . Аналого-цифровые и цифроаналоговые преобразователи могут выполняться по любой известной схеме. Блок 29 сравнения и второй суммирующий блок 30 могут выполняться по любой известной схеме десятичного сумматора ( вычитателя. При реализации измерителя 28 удлинения с аналоговым выходом, включения цифроаналоговых преобразователей в блок 31 умножения, регулятор 3 удлинения и аналого-цифрового пре образователя в блок 37 деления,не тр буется. Все операции при этом производятся с аналоговыми сигналами. Вто рой суммирующий блок 30 и блок 29 сравнения выполняются по схеме анало говых устройств суммирования и вычит ния. Задатчик Зб удлинения может вы полняться в виде переключателя т.е. на его выходе формируется сигнал зад ния в аналоговой форме) . Устройство работает следующим образом. Сигналы с выхода измерителей k2 .и АЗ натяжения поступают на соответствующие входы уменьшаемое и вычитаемре блока А1 вычитания, на выход которого формируется сигнал, равный BblУ4 Bbn 4ь ьbl 4a V 1 (О где U-s. ,; - выходной сигнал блока - выходной сигнал блока k вычитания; и . , выходной сигнал измерителя АЗ натяжения; ыходной сигнал измериеля А2 натяжен 1я; атяжение полосы после згибателя 3; атяжение полосы до изибателя 3; оэффициент передачи изт ерителей А2 и АЗ натяения. ыходов блока 25 диффедатчика 2А тока,, блока оступают на соответстервого суммирующего ыходе которого фор1 1равный)Ь Х4Л 6Ь1ХаБ .j,y -fKRU съв-Ч%сг -л --ЧЧЦ- выходной сигнал суммирую1чего блока АО; выходное напряжение блока 38 задания опорного напряжения; выходной сигнал датчика 2А тока; выходной сигнал блока 25 дифференцирования (знак минус обусловлен тем, что выход 2А и выход 25находятся в противофазе как сигнал обратной связи и сигнал задания); ток якоря двигателя 8; момент холостого хода на валу двигателя 8 (обусловлен потерями в приводном механизме ролика А); коэффициент передачи датчика 2А тока; угловая скорость вращения тянущего ролика А (двигателя 8); коэффициент передачи блока 25 дифференцирования;коэффициент передачи суммирующего блока АО соответственно по первому, второму, третьему и четвертому входам. момент на валу ролика ) --W.M,-3. (3) ffle М - статический момент на валу ролика Ц (двигателя .8); полый момент на валу ролика (двигателя 8) ; момент инерции на валу двигателя 8; конструктивная постоянная двигателя 8 ((при этом полагается, что поток возбуждения двигателя 8 постоянен). Если установить-коэффициенты пере дачи К, Kg, Kg и К первого суммирующрго блока 0 таким образом, что К к - JLv V - . 1 f VsTF E ER. ((e РЧ - радиус ролика 4j, то, выражение 4l) с учетом выражения (3) при мет вид и - -тОк /л t TR Сигнал Ufe(, выхода первого сум мирующего блока АО поступает на, вход делимое блока 39 деления, на вход делитель которого с выхода Ьадатчика 37 сечения подается сигнал,пропорциональный сечению (Q) полосы. На выходе блома 39 деления формируется сигнал, равный II- У вых40 Да-ТЛ К и„.,. ,.) Bbix г.9 ОДЧО сигнал блока 39 деления; выходной сигнал задатчи ка 37 сечения. С учетом формул {{) и (4 ,и исходя из того, что T,-T4,iMp|R выраже-. (5) принимает вид бь1Ч)|) (l)K. Сигналы с выхода блока 39 делени и с выхода задатчика 36 удлинения поступают на вход второго суммирующего блока 30, на выходе которого Формируется сигнал, равный быу го ВЫх-Ьб Ых ,1 йЫ-клй VnP-1 vnaa.) ftbiXЪ ЬШЪЬ Vnp-1 выходной сигнал второго ВЫ суммирующего блока 30; выходной сигнал задатчика Зб удлинения, кото рый определяет .требуему величину пластической деформации. Сигнал выхода второго сум мирующего блока 30 поступает на второй вход блока 29 сравнения, на первый вход которого с выхода измерителя 28 удлинения поступает сигнал (U(a, ) пропорциональный измеренному удлинению. В статике (т.е. при установившемся значении удлинения ригнал на выходе блока 29 сравнения равен нулю, так как регулятор З Удлинения содержит/ПИ-регулятор (система астатическая). Следовательно ,о И.М (8) С учетом известных выражений имеем (9) Как видно из выражения (8) сигнал задания удлинения (U,y,) на выходе задатчика Зб удлинения однозначно связан (через постоянный коэффициент К) с величиной (,пл) пластической деформации, т.е. погрешность измерения Vnpi evnpi ® деформации (yдлVIнeния ) , обусловленная упругим растяжением полосы, полностью компенсируется путем введения дополнительной добавки (Up,j,,y,p) к сигналу (Ug,j,,y,/) задания удлинения. Сигнал с выхода второго суммирующего блока 30 поступает также на второй вход блока 31 умножения, на первый вход которого подается сигнал пропорциональный линейной скорости на окружности ролика 4, с выхода задатчика 32 опорной скорости. На выходе блока 31 умножения формируется с учетом упругого растяжения полосы ., сигнал задания разности скоростей роликов и 6, равный выкао выхьа VBblX C&,- fevnp,6vnpa V S ВЫХОДНОЙ сигнал блока 31 умножения; и .к,, выходной сигнал задат6Ь(Х,2. чика 32 опорной скорости;коэффициент пропорцио-; нальности. С учетом известных формул имеем . Ue.b,,,,,-V4). (1) Сигнал задания Ш,) разности скоростей пропорционален разности (Vg - )i линейных скоростей на окружности роликов 4 и 6, которую необходимо поддерживать для обеспечения заданной величины пластической деформации (плУ Таким образом, предлагаемое устройство позволяет повысить точность 139 поддержания заданной величины пластической деформации за счет компенсации погрешности измерения пластической деформации вызванной наличием упругих деформаций, пуТем введения дополнительной добавки к сигналу задания пластического удлинения, пропо циональной погрешности. Введение двух измерителей натяжения, зад атчика сечения полосы, блока задания опорного напряжения, вычитания, деления, двух суммирующих блоков и новых связей позволяет повысить точность поддержания требуемой величины пластической деформации металлической полосы путем устранения погрешности, связанной с наличием упругой деформации полосы. Использование изобретения позволит снизить неплоскостность металлической полосы, расход электроэнергии и повысить срок службы механообо рудования за счет повыиения точности поддержания заданной величины пластической деформации. Экономический эффект использования устройства на НТА-2 составит 82 тыс.руб. в год. Формула изобретения Устройство управления изгибнорастяжным агрегатом, включающим две группы тянущих роликов с индивидуаль ным приводом от двигателем постоянного тока, первая группа которых рас положена до изгибателя и непосредственно перед ним содержит первый тянущий ролик, вторая группа расположена после изгибателя и непосредственно после него содержит второй тянущий ролик, содержащее задатчик удлинения полосы, первые и вторые импульсные датчики, первые и вторые из мерители скорости , механически связанные с первым и вторым тянущими роликами соответственнЬ, регуляторы тока якоря приводных двигателей первой и второй групп тянущих роликов, первые входы которых соединены с вых дами первого и второго регуляторов скорости соответственно, вторые входы - с выходом блока дифференцирования, а третьи входы - с выходами дат чиков тока якоря соответствующих дви гателей, первые входы первого и второго регуляторов скорости подключены к выходамсоответствующих измерителей скорости, вторые входы - к 6 выходу задатчика скорости, соединенного с входами блоков коррекции по отношению диаметров роликов и дифференцирования, с первыми входами блока умножения и регулятора удлинения, вы-, ходы блока коррекции па отношению диаметров роликов и блока умножения соединены соответственно с третьими входами первого и второго регуляторов скорости, четвертый вход первого регулятора скорости через инвертор а второго непосредственно соединены с выходом регулятора удлинения, подключенног го вторым входом к выходу блока срав eни I, первый вход которого соединен с выходом измерителя удлинения полосы, связанного входами с выходами импульсных датчиков скорости, о т л и ч а ющ е е с я тем, что, с целью гтовышения точности поддержания требуемой величины пластической дeфopмaции в устройство дополнительно введены между первым тянiu им роликом и изгибг-гелем первый измеритель натяжения полосы,между изгибателем и вторым тянущим роликом второй измеритель натяжения . лосы, блок вычиtaния, входы вычитае- . мое и уменьшаемое которого соедине ны с выходами первого и второго изме рителей натяжения полосы сортветстг венно, первый суммирующий блок, пер-. вый, второй,: третий и четвертый входы которого подключены Соответственно к выходам блоков вычитания, дифференциРования, задания опорного напряжения и датчика тока якоря привбдного двигателя первого тянущего ролика, блок деления, входы делимое и делитель которого соединены с выходами первого суммирующего блока и задатчика сечения полосы соответственно, второй суммирующий блок, первый и второй входы которого .подключены соответственно к выходам блока деления и задатчика удлинения полосы, соответственно, а выход - к вторым входам блоков сравнения и умножения. Источники информации, принятые во внимание при экспертизе 1.Файнштейн В. М. Совершенствование средств правки листового пункта за рубежом. Обзорная информация, . Черметинформация. 1977, Сер.7, ВЫП.1, с., рис. За, 78. 2.Герхард Гляйснер, Эхард Вильке, Хайо АНкол. Издание акционерного общества Сименс Электрооборудование для линий обработки.№128190,с. 1 2-Н.
