Предметом настоящего изобретения является автоматический регулятор с электрической гибкой бесконтактной обратной связью, предназначенный для схем, в которых на выходе измерительного элемента получается ток или напряжение, величина которого зависит от регулируемой величины, а на выходе исполнительного элемента - механическое перемещение. Электрическая гибкая бесконтактная обратная связь осуществляется при по1ЮЩИ небольшого генератора постоянного тока (тахогенератора), механически соединяемого с валом или порщнем серводвигателя, представляющего собой исполнительный элемент регулятора.
Согласно изобретению, в таком регуляторе во входную цепь усилительного элемента регулятора последовательно с измерительным эле ентом включены, во-первых, обмотки переменного тока дросселя насыщения, подмагничивающая обмотка которого питается от указанного тахогенератора, и, во-вторых, обмотка дросселя с поворотнылг якорем, механически связанным с исполнительным элелтентом
регулятора. Благодаря этому величина тока во входной цепи усилительного элемента ставится в зависимость как от величины перемещения исполнительного эле.мента, так и от скорости этого пере: 1ещения.
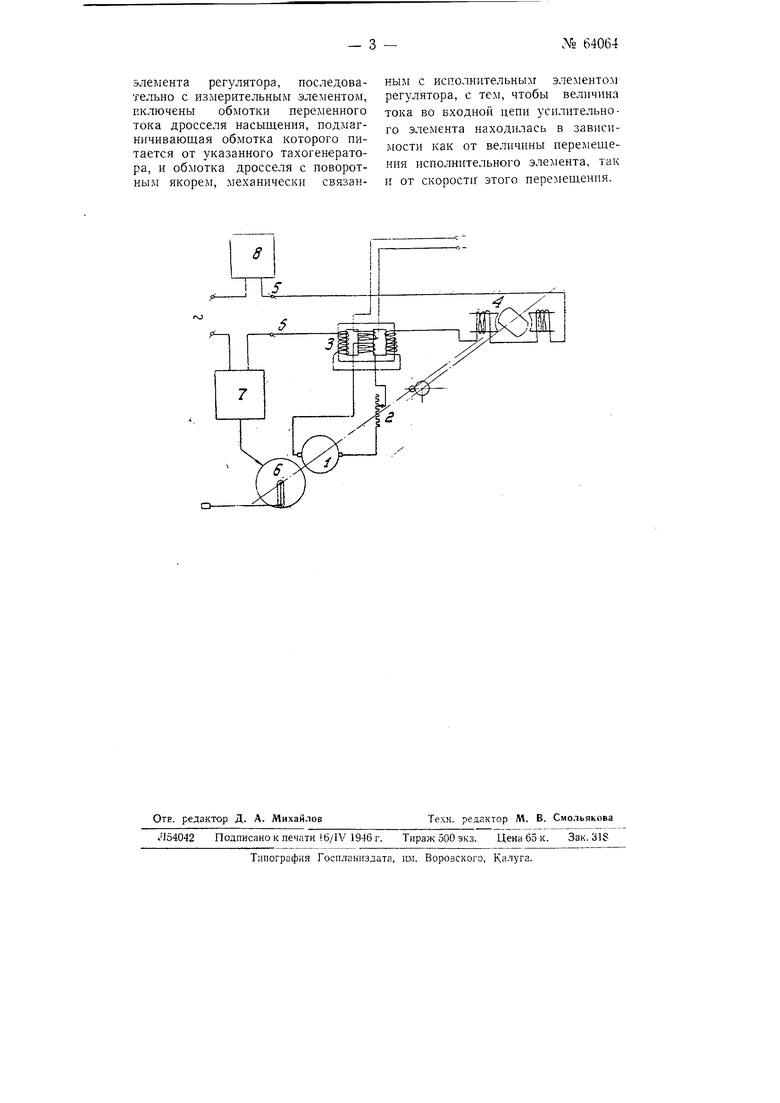
Сущность изобретения поясняется чертежом, на котором изображена электрическая схема предлагаемого регулятора.
Исполнительным органом регулятора является серводвигатель 6, с валом или поршне.м которого механически связан тахогенератор 1. В цепь последнего включены сопротивление 2 и управляющая обмотка дросселя подмагничивания 3. С валом серводвигателя 6 связан также поворотный якорь дросселя 4. Элементы 1, 3, 4 образуют электрическую гибкую обратн ю связь.
Принцип действия этой гибкой обратной связи заключается в том, что переменный ток в цепи 5,5, подаваемый на вход усилительного элемента 7 регулятора, ставится в зависимость не только от величины отклонения регулируемого параметра от заданного значения, но и о величины -перемещения п скорости движения исполнительного элемента регулятора (серводвигателя), причём при стремлении тока в цепи 5,5 (вследствие воздействия на неё измерительного элемента 8) увеличиться благодаря изменению регулируемого параметра, обратная связь стремится его уменьшить, и наоборот. Схема гибкой обратной связи работает следующим образом. Предположим, что цепь генератора постоянного тока разорвана. Тогда мы будем иметь жёсткую обратную связь. Действительно, каждому положению поршня серводвигателя будет соответствовать определённое положение якоря дросселя 4 и, следовательно, определённое значение тока в цепи 5,5, зависящее от индуктивности цепи, т. е. от згла поворота якоря дросселя 4. Таким образом, обозначая угол поворота дросселя 4 через 9. а ток в цепи 5,5 - через J, получим: .1 а--, где а - постоянный коэфициент. Предположим теперь, что механическая связь между серводвигателем б и дросселем 4 разорвана, но зато цепь подмагничивания дросселя 3 приключена к генератору 1. Тогда при движении вала серводвигателя в обмотке подмагничивания дросселя будет протекать ток i, связанный с э. д. с. генератора I уравнением: -:+-где L и R - индуктивность и сопротивление цепи подмагничивания; но так как т. е. 3. д. с. генератора пропорциональна его угловой скорости, то: Если -предположить, что ток I в цепи 5,5 прямо пропорциона тен i, т. е. I ni, то получим: dj: Rd -f n dt n dt Если теперь предположить, что одновременно действовать как дроссель с подмагничиванием 3, так и дроссель с поворотным якорем 4, то эффекты, характеризуемые выражениями (1) и (5), будут складываться, и мы будем иметь: Т .- т dt dt пII . :Э iп Уравнение (6) имеет совершенно такой же вид, как и уравнение обычного механического изодромного механизма, а это доказывает, что характер их действия один и тот же. При быстром движении серводвигателя в цепи 5,5 создаётся изменение тока, которое после остановки серводвигателя постепенно уменьшается до значения, определяемого коэфициентом остаточного статизма Т, со скоростью, зависяшей от постоянной времени Ti цепи подмагничивания. Предмет изобретения Автоматический регулятор с электрической гибкой обратной связью бесконтактного типа, предн азначенный для схемы, в которой на выходе измерительного элемента получается ток или напряжение, зависящее от регулируемой величины, а на выходе исполнительного элемента - перемещение серводвигателя, механически связанного с тахогенератором постоянного тока, служащим для получения гибкой связи, отличающийся тем, что но входную цепь усилительного
элемента регулятора, последовательно с измерительным элементом, включены обмотки переменного тока дросселя насыщения, подмагничивающая обмотка которого питается от указанного тахогенератора, и обмотка дросселя с поворотным якорем, механически связанным с исполнительным элементом регулятора, с тем, чтобы величина тока во входной цепи усилительного элемента находилась в зависимости как от величины перемещения исполнительного эле:мента, так и от скорости этого перемещения.