Изобретение касается устройства для автоматического решения линейных диференциальных уравнений с постоянными коэфициентами, линейных диференциальных уравнений с переменными коэфициентами и нелинейных диференциальных уравнений, а также систем диференциальных уравнений. Устройство позволяет получать решения в виде графиков функций, удовлетвоР5ПОЩИХ решаемым уравнениям.
Принцип действия устройства заключаетвя в превращении электрическим способом отдельных членов диференциального уравнения в пропорциональные им пары сил, воздействуюш;ие на некоторую подвижную часть таким образом, ЧТО закон движения последней выражается рассматриваемым диференциальным уравнением.
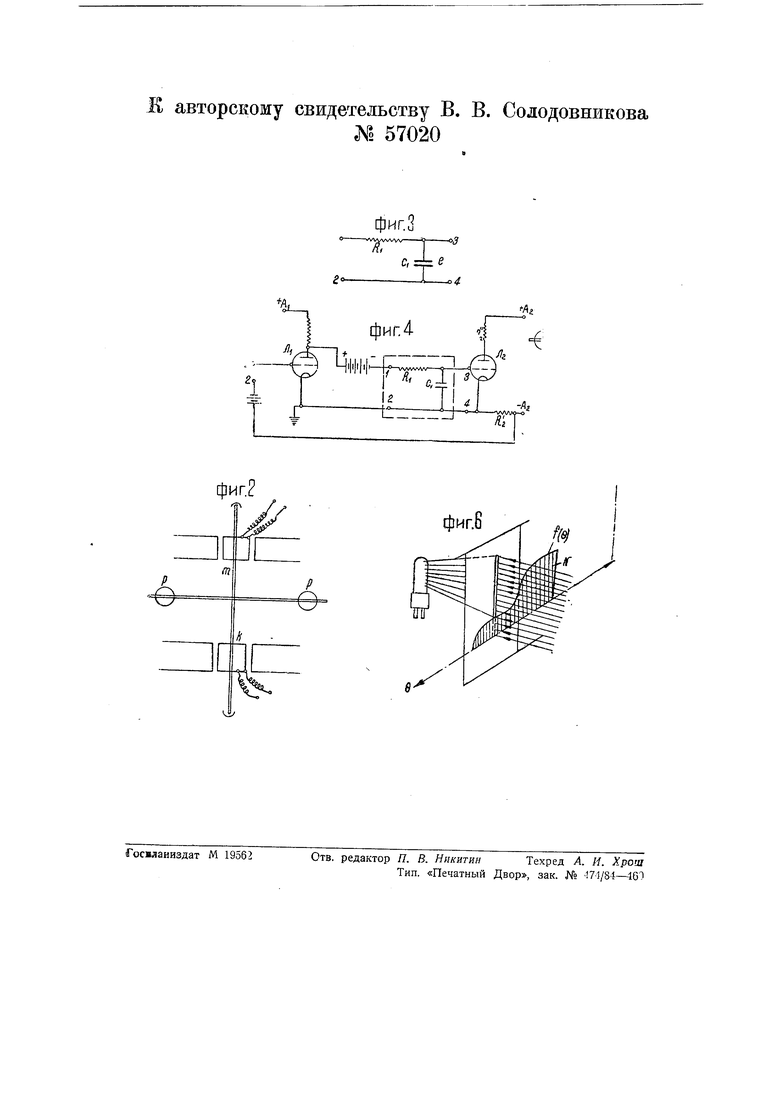
Согласно изобретению, устройство состоит из электродинамической, и нескольких ферродинамических систем, подвижные рамки которых укреплены на общей оси и которые служат для создания вращающих моментов:, пропорциональных искомой функции, ее первой производной, а также свободному члену уравнения. В случае рещения уравнений с переменными коэфициентами ферродинамические системы должны быть снабжены приспособлениями для регулирования токов в их обмотках, соответственно заданным законам изменения коэфициентов. Для решения уравнений высших порядков могут быть применены, согласно изобретению, несколько указанных выше систем, электрически соединенных между собой. Кроме того, сущность изобретения составляют интеграторы для получения моментов, пропорциональпых членам уравнения с неизвестной функцией под знаком интеграла. Эти интеграторы состоят из конденсатора и сопротивления, включенных между двумя каскадами усилителя с обратной связью, служащей для подачи на входные зажимы напряжения, пропорционального разности потенциалов на конденсаторе.
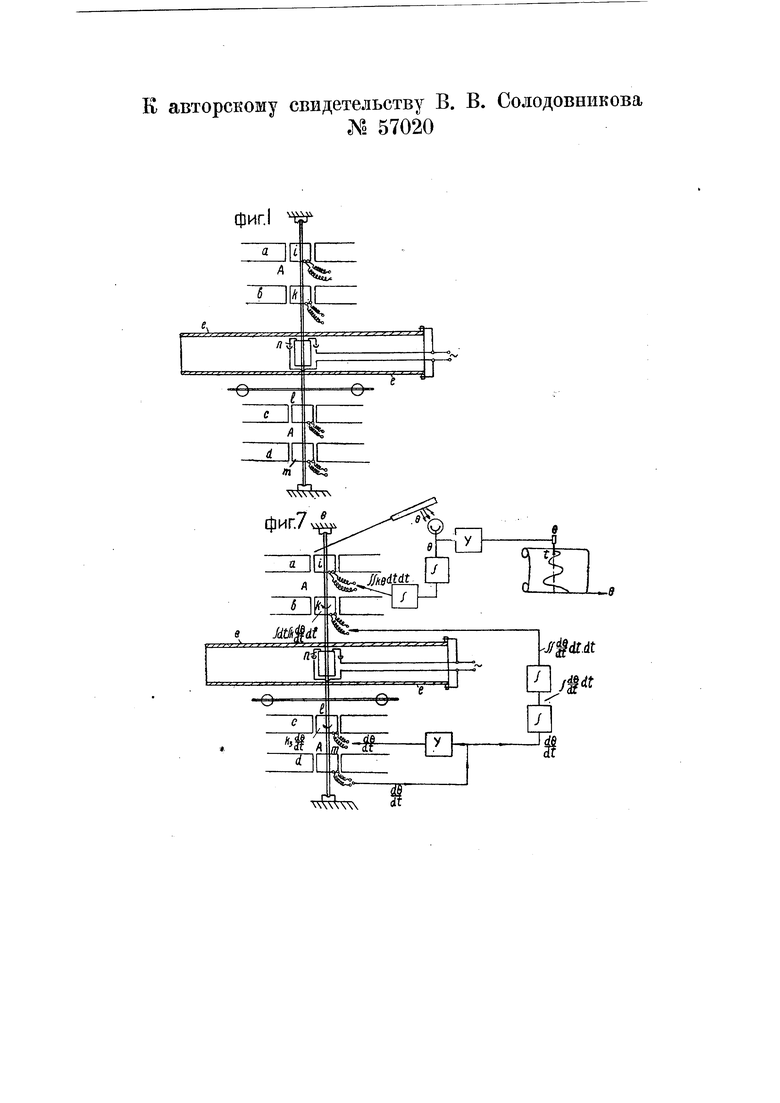
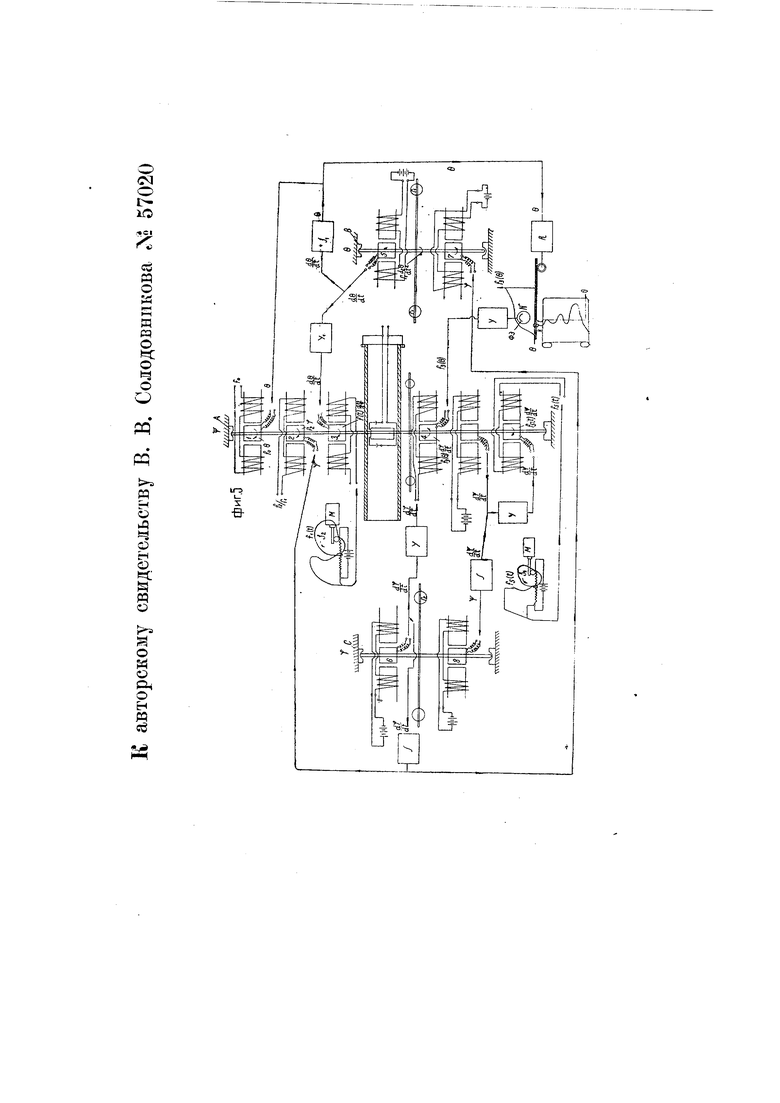
На фиг. 1 прилагаемого чертежа схематически изображена основная часть устройства, называемая в дальнейшем электродинамическим маятником; на фиг. 2 - инерционный элемент; фиг, 3 и 4 поясняют действие и схему включения электрического интегратора; на фиг. 5 приведена схема соединения трех устройств для решения системы из трех диференциалькых уравнений; на фиг. 6 изображено приспособление для получения переменных коэфициентов; на фиг. 7 - схема соединений для решения диференциальных уравнений четвертого порядка. Электродинамическиймаятник .(фиг. 1) состоитИЗ подвижной части Л электромагнитов а, Ь, с, d и длинного соленоида е. На оси подвижной части укреплены из изолированной проволоки рамки i, k, 1, т и катушка п; плоскость катушки п перпендикулярна к оси соленоида е. Пусть по катушке п проходит переменный ток ii, той же частоты и фазы,, что и ток /2л питаюш,ий соленоид е. Ecjfflj отклонить катушку п на угол в от ее положения равновесия, то пренебрегая трением в осях (далее будет изложен способ компенсации этого треиия) и предполагая, что ток во всех остальных рамках равен нулю, можно представить уравнение движения подвижной части при углах отклонения, lie превышаюш,их 10°, когда с достаточной степенью точности можно считать sin в равным 0, в следуюшем виде: , Q Уравнение (1) аналогично диференциальному уравнению колебаний обычного маятника. Если к подвижной части А прикрепить зеркальце и направить на него луч света, то отраженный луч света запишет на фото-бумаге решение диференциального уравнения (1). Изменяя ток /1 в катушке п по некоторому закону fo(t) или foC), можно получить решение диференциального уравнения вида +/„(6)9 0(2) Решение диференциальных уравнений вида rf-6 ,,rfS I, (3) где /I и /о - некоторые функции независимой переменной t или1 неизвестной функции в, можно получить следующим образом, используя кроме катушки п рамки m и /. Рамка т находится в поле электромагнита cf, а рамка / - в поле электромагнита с. Рамка т состоит из большого числа витков тонкой проволоки. При колебаниях подвижной части А в рамке т будет наводиться Э.Д.С., пропорциональная веrfflличине . Если; эту э.д.с. усилить при ПОМОШ.И лампового усилителя и „ rfo ток, пропорциональный - , подать fr рамку /, то на подвижную часть А будет действовать дополнительная пара сил f . di где /1-возбуждение электромагнита с. Таким образом, для получения требуемого закона изменения коэфициента при первой производной нужно изменять возбуждение электромагнита по закону /1. При этом необходимо избегать насыщения сердечника электромагнита и применить сердечник с ничтожнцм гистерезисом, например из пермаллоя. Итак, изме1няя ток в катушке п по закону /о и возбуждение электромагнита с по закону fb при помоши электродинамического маятника можно находить решения уравнений вида (3). Для решения уравнений со свободным членом вида -S+A5-fAe (0 . - -(4) геобходимо лишь добавить пару сил, пропорциональную F(t). Для этого МОЖНО) воспоЛзоваться ра1мжой k. Изменяя ток в этой рамке по закону 5F(t) и оставляя возбуждение электромагнита, в поле которого вращается рамка, постоянным, можно ввести пару сил вида F(t). Таки1М образом уравнение движения подвижной системы будет выражаться уравнением (4), и луч, отражаемый зеркальцем, запишет его решение. Введение начальных условий в предлагаемом устройстве осуществляется следующим образом. Пусть начальные условия в случае уравнения (4) имеют вид (BO ... (5) Для того, чтобы ввести начальное условие 001 необходимо лишь повернуть подвижную часть на угол во, а затем предоставить ее самой себе. Для введения начального условия М wJ.o нужно Б начальный момент пропустить через рамку / импульс тока очень малой продолжительности по сравнению с собственным периодом колебаний подвижной части. Тогда начальная скорость подвижной части: А будет определяться соотношением: du .D di/t-u J где D - количество движений, сообщаемое подвижной части импульсом тока, а 7 --ее момент инерции. Решение диференциальных уравнений высших порядков производится при помощи вспомогательных инерционных элементов и электрических интеграторов. В качестве, инерционного элемента используется часть электродинамического маятника без катушки я, вращающейся в поле соленоида е (фиг. 2). В этом случае упругий момент вида /о В будет отсутствовать. Если пренебречь трением осей, то маятник будет обладать только моментом инерции J, определяемым массой щариков р и их расстоянием от оси. Если рамку k инерционного элемента питать током, изменяющимся по закону 9 (U то уравнение его движения будет иметь вид , ,.. J- (i} Рамка m служит для измерения угловой скорости инерционного элемента, rfO т. е. 77Электрический интегратор представляет собой особого рода усилитель с обратной связью, действие которого быть пояснено с помощью схемы, изображенной на фиг. 5. Он состоит из сопротивления RI и емкости С. Если обозначить мгновенное значение напряжения на зажимах /, 2 через и, напряжение на зажимах конденсатора Ci е, то е будет равно интегралу от и только в том случае, если ток, идущий через R и Cj, будет пропорционален и во все моменты времени. Это будет иметь место в том случае, если е и, так как только при этом условии ,J Г C,R, J е может быть сделано очень малым по сравнению с и, если взять очень большое сопротивление R(, но чем меньше е, тем труднее его усилить до нужной величины. Это затруднение можно обойти, включив схему фиг. 3 между двумя каскадами усилителя постоянного тока (см. фиг. 4). Тогда напряжение е будет усилено при помощи лампы Л2 в -2 раз. В цепь лампы Лг включено сопротивление Rz величины D 2 . где - полное сопротивление анодной цепи лампы ,772 и - коэфициент усиления Л). Так как R 1 а переменное напряжение на RZ равно , то переменное напряжение на . будет равно . Это напряжение подано на вход усилителя. Поэтому напряжение на зажимах /, 2 будет равно и -j- е и, следовательно, напряжение на сопротивлении RI будет в точности . .и равно и, а ток / будет равен и равенство (6) будет выполнено даже при не очень больщих значениях RI. С помощью предлагаемого устройства можно рещать н уравнения высших порядков. В качестве примера ниже пояснен способ решения уравнения d«9 , d-8 . . ri-O , . d-& , Г/3 -+-/4..s-r + /,+/«6 0 где /6... 0 могут быть постоянным или зависеть от в или t. Это уравнение легко привести к системе диференциальных уравнений вида . rf-e Л : , f , d |Л /i „I / /3 rf I , dt /i + У, + y,/, T. e. к системе трех диференциальных уравнений второго порядка. Если начальные условия для ура внения (7) имели вид о V. /f. dt4, в dfj f) III. O : V / / o fd с II. / df),, ,.o -n:, ; i-j-: то для системы (8) они будут иметь вид ( } .(10 - fl 14- о 0 1 .. е.. Для решения системы (8) необходимо взять одни электродинамический маятник А и два инерционных элемента В С, соединенные по схеме фиг. 5, И; сделать так, чтобы уравнение движения электродинамического маятника выражалось последним из уравнений системы (8), а уравнения движения инерционных элементов В и С выражались первыми двумя уравнениями системы (8). Предположим для конкретности, что в последнем из уравнений (8) коэфициенты /1 и /5 являются заданными функциями времени, коэфициент /з является заданной функцией от переменной В , а остальные коэфициенты постоянны. Тогда это уравнение можно переписать в следующем виде; 8-к,л(о5+с.(0)+ + C, + C,/,()§ + CoG. .(11) где Со...С5 - постоянные. Уравнение (11) аналогично уравнению (4), только в нем внещняя сила состоит из четырех составляющих, т. е. (0 Q/3(0)f+ QH+c /,(). Способ же решения уравнения (4) уже пояснен выше. Различие заключается лишь в том, что в случае уравнения (4) для создания внешней силы было достаточно располагать одним электромагнитом и одной рамкой, прикрепленной к электродинамическому маятнику, а в случае уравнения (11) необходимо располагать четырьмя рамками /, 2, 3, 4 (см. фиг. 5). При вращении инерционных элементов В и С рамки 5 и б непрерывно измеряют их скорость. Поэтому способ получения составляющих вида СзЛ(б) и c,A(oJ очевиден. Для получения составляющих C,2f и Сцв использованы электрические интеграторы по фиг. 4, которые непрерывно интегрируют э.д.с. на выходе рамок 5 и б и подают их в рамки 2 и /. Первые два уравнения системы (8) получаются при помощи инерционных элементов В и С. Их рамки 7 и 5 питаются токами и , получаемыми при помощи интеграторов. Для задания начальных условий маятник А и инерционные элементы отклоняют на углы, определяемые соотнощениями (10). Через соответствующие рамки элементов А, В н С пропускают импульсы тока, определяемые начальными значениями угловых скоростей, согласно уравнению (10), и затем систему предоставляют самой себе. При этом регистратор передвигает перо k, которое чертит на равномерно движущейся бумаге решение уравнения (7). Можно применить и другой метод решения, поясняемый ниже на примере уравнения 4-го порядка с постоянными коэфидиеятами d6 , , rf6 , , d-d , , rfS , /«4 ;m + 3 лз + 2 ai -(- KI - -1+ V o
Перенесение последних двух членов 5ТОГО уравнения в правую часть и двухратиое интегрирование дает
, d-0 , , й6 , д
к,, -гг., Г «jO
irff
dt
(Ai2 + VJJrf. .(13)
Для решения этого уравнения нужно применить схему соединений по фиг. 7. На ней нетрудно проследить образование моментов, соотв|етствующих членам уравнени я (13).
Описанными методами можно воспользоваться не только для рен1ения диференциальных уравнений высших )юрядков, но и для решения систем диференциальных уравнений.
Для получения коэфициентов вида f(t) в устройстве по фиг. 5 предусмотрены шаблоны Si и Sz, равномерно передвигаемые при помош,и моторов Af, я связанные с движками потенциометров. При этом ток в цепи- движков будет изменяться по закону i(t).
Переменные коэфициенты вида /()) получают при помощи регистратора R. Перемещение выходного элемента регистратора R в каждый момент времени пропорционально в. К выходному элементу регистратора присоединяют шаблон N, форма которого соотsieTCTByeT виду функции /(В). Шаблон передвигается мимо равномерно освещенной щели (фиг. 6), свет от которой падает на фотоэлемент. Ток в цепи фотоэлемента будет изменяться по закону /(9). Этот ток усиливают и проьускают через соответствующую рамку маятника.
От регистратора R требуется значительное быстродействие, так как в некоторые моменты времени величина может возрастать или убывать очень быстро. , При конструировании регистратора R можно воспользоваться принципами регулирования по производным. Воздействуя на выходной элемент такого следящего устройства парой сил, пропорциональной разности величин на входе и на выходе, можно сконструировать, как это показал Хазен, следящее устройство, имеющее время установки, равное ОД сек. Это время устаяовки можно уменьшить во много раз,
если воздействовать на выходной элемент регистратора парами сил, пропорл
циональными не только Л но и
При решении какого-либо диференциального уравнения может оказаться, что величина в, начиная с некоторого момента t ь будет изменяться настолько быстро, что регистратор не сможет следить за ее изменениями. Для того, чтобы узнать о том, что прибор в некоторой области исказил решение, па выход рамки 5, дающей скорость изменения в, можно включить какое-либо сигнальное устройство. При достижении скоростью предельного допустимого значения сигнальное устройство будет давать знать о том, что прибор начал искажать решение. В этом случае, чтобы нолучить правильное решение, нужно либо остановить прибор и изменить масштаб В:ременн для всего решения, либо зарегистрировав автоматически значения всех членов диференциального уравнения в момент 1, когда скорость начала превышать допустимое для нее значение, воспроизвести при замедленном масштабе времени только искаженную часть решения.
Компенсация трения подвижной системы, не зависящего от скорости и представляющего собой один из основных, если не самый главный, источник погрешности устройства, может1 быть произведена одной из существующих схем безъинерционных электронных реле. Пусть имеются два таких реле, на выход которых включены две катущки, укрепленные на подвижной части А и расположенные в поле электромагнита. Одно из электронных реле должно срабатывать в тот момент, коМгда т; изменяет знак + на знак -,
а другое реле должно срабатывать, rfij
изменяет знак - на знак .
когда
dt
Подобрав соответствующим образом силу тока, даваемую реле при срабатывании, можно добиться компенсации трении, так как на подвижную часть будет действовать дополнительный момент, равный моменту трения, но противоположный ему по направлению. В тех случаях, когда устройство не
позволж т найти-решение с требуемой степенью точности, можно воспользоваться методом последовательных приближений. Метод основан на том соображении, что усложнение формальных выражений для коэфициентов уравнения не делает решение более трудным для устройства. Если, например, нужно решить с большой степенью точности уравнение вида
Л(о2+л( -(А)
diпоступают так. Решают его при поМОШ.И предложенного устройства. Полученную в результате решения кривую апроксимируют при помош,и функцИ)И (например, полинома) вида Fffj. Погрешность полученного решения будет равна
6 (0-0
(В)
О /-(0-0,
Подстановка (В) в (А) дает
Л (f) -S +Л.(0 § + 6i ф (О . (С)
dfгде
d-F
.dF ,
Л((0
kF. dt
Вычислив выражение для j (t), вводят обычным образом соответствующую пару сил и решают уравнение (С) относительно i. Тогда решение ( (t) будет складываться из ординат первого и второго решения. Правда, точность вычисления устройством погрешности в; ограничивается точностью устройства, но так как в, мало по сравнению с в, то погрешность в определении в, будет иметь второй порядок величины.
Предмет изобретения.
1.Устройство для решения диференциальных уравнений, отличающеесл тем, что, с целью воспроизведения иско-мой функции в виде движения подвижной части, воздействующей на регистрируюш.ее приспособленке, оно состоит из электродинамической и нескольких ферродинамических систем, подвижные рамки которых укреплены на общей оси и которые служат для создания вращающих моментов, пропорциональных искомой функции, ее первой производной, а также свободному члену уравнения.
2.Форма выполнения устройства по п. I, отличающаяся тем, что для решения уравнений с переменными коэфициентами ферродинамические системы снабжены приспособлениями для регулирования токов в их обмотках соответственно заданным законам изменения коэфициентов.
3.Форма выполнения устройства по п. 1, отличающаяся тем, что для решения диференциальных уравнений высщих порядков несколько устройстЕ, описанных ВЦ. 1, электрически соединены между собой.
4.Форма выполнения устройства по п. 1, отли.чающаяся тем, что для получения моментов, пропорциональных членам уравнения с неизвестной функцией под знаком интеграла, предусмотрены интеграторы в виде конденсатора и сопротивления, включенных между двумя каскадами усилителя с обратной связью, служащей для подачк на входные зажимы напряжения, пропорционального разности потенциалов на конденсаторе. к авторскому свидетельству В. В. № 57020 Сододовникова
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для исследования работы регуляторов гидротурбин | 1940 |
|
SU67093A1 |
| УСТРОЙСТВО ДЛЯ РЕШЕНИЯ СИСТЕМ ДИФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ | 1939 |
|
SU60525A1 |
| Устройство для математических вычислений | 1937 |
|
SU56843A1 |
| Устройство для решения интегральных уравнений | 1939 |
|
SU70321A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЧАСТОТЫ ПЕРЕМЕННОГО ТОКА | 1934 |
|
SU45682A1 |
| Прибор для решения дифференциальных уравнений | 1936 |
|
SU53526A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПРОИЗВОДСТВА ПРИБЛИЖЕННЫХ ВЫЧИСЛЕНИЙ | 1932 |
|
SU36063A1 |
| Устройство для автоматического решения систем дифференциальных уравнений с комплексными коэффициентами | 1947 |
|
SU75410A1 |
| Крутильный маятник | 1989 |
|
SU1763944A1 |
| Автоматический регулятор | 1940 |
|
SU64064A1 |
фиг.1
а L
-еiJ
Т1
т чччччччч
фиг.7
4
о м о .«С
03 И О
Ш СР
tet о t
рр
fp
1
о л ч
сн О
и и о
Р
; о м
о 0ц
о н и
eg г Е авторскому свидетельству В. В.
«vvvvww - - - --о № 57020
фиг.З
т
1,о4
Лг Солодовникова
фиг
Р
Р /-
