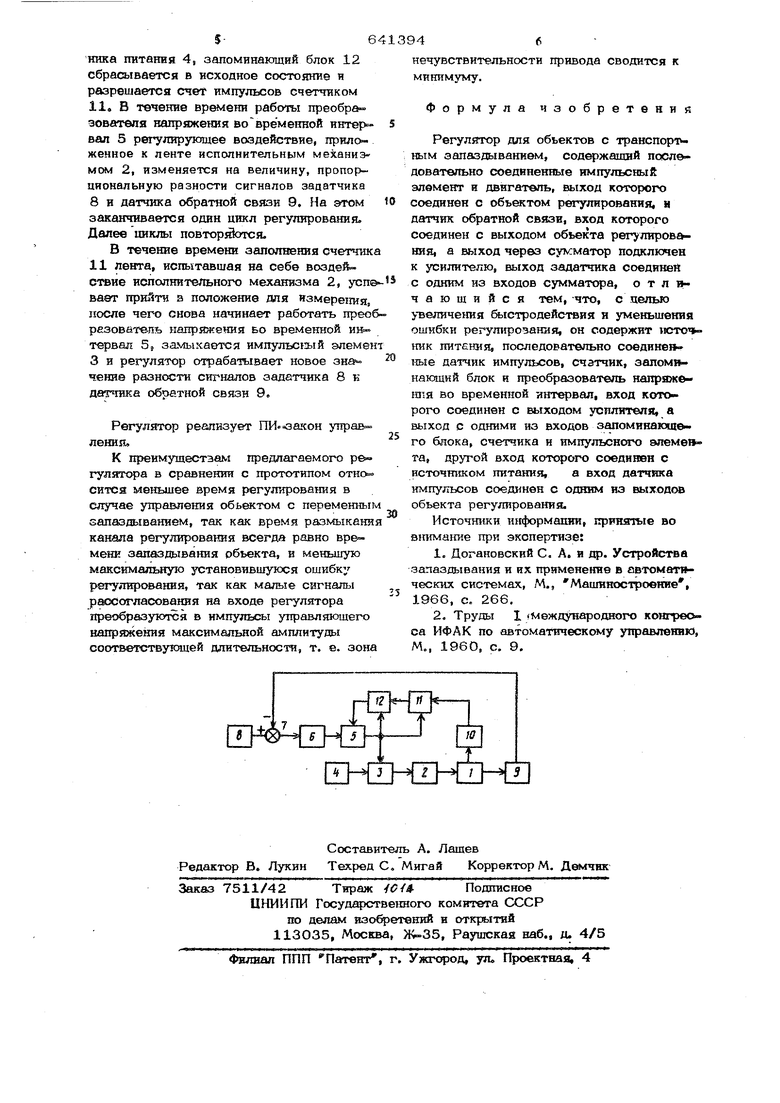
(54) РЕГУЛЯТОР ДЛЯ ОБЪЕКТОВ С ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ СОВ соединен с одним из выходов объекта регулирования. На чертеже представлена функциональная схема системы автоматического регулирования объекта 1 с транспортным запаздыванием. Регулятор содержит ис полнительньхй механизм 2 с приводным, например, электрическим двигателем, подключенным через импульсный элемент 3 к источнику питания 4. При такой схеме двигатель работает с постоянной максимальной скоростью, а перемещение регулирующего органа исполнительного механизма 2 определяется длительностью замкнутого состояния импульсного эле мента 3, свяоанного с преобразователем напряжения эо време1шой ин1ервал 5, вход которого через усилитель 6 подклк чен к сумматору 7 сигналов задатчика 8 и датчика обратной св5взи 9, Преобразователь напряжения во време шой интервал 5 преобразует разностный сигнал во временной интервал путем сравнения с линейно-изменяющимся напряжением. Такое управление двигателем исполш1телзь кого механизма 2 позволяет свести к минимуму зону нечувствительности регулятора и, следовательно, максимальную установившуюся ошибку регулирования. Для размыкашш какала регулирования на время транспортного запаздывания рег5лятор содержит датчик импульсов 1О связанный с объектом 1 и подключенны к счетчику с регулируемым коэффициен toM пересчета 11, Так как транспортное запаздьгватше у объектов обусловлэно транспортированием вещества в потоках на некоторое paccToss кие, то связав с движущимся веществом датчик импульсов, подключив его к счет чику и ограштчив объем счетчика числом, соответствующим заданному рассто5шию, можно измерять время запаздывания при любых скоростях массопереноса с точно. стью, определяемой дискретностью задат
чика.
Выход счетчика 11 соединен с запоми- нающим устройством 12, связанным со входом запуска преобразователя напряжения во временной интервал и разрешающим его работу толысо после заполнения счетчика 11. Для периодичеокой подготовки 11 и запоми нающего устройстеа 12 перед началом очередного цикла работы их входы подготовки связаны с выходом-преобразователя напряжения во временной интервал. 6
Одновременно с началом .процесса преоб;разования импульсный элемент 3 подключает двигатель исполнительного механизма 2 к источнику питания 4. В ходе процесса преобразования счет импульсов счетчиком 11 запрещается. По сигналу преобразователя напряжения во времеиной интервал 5 счетчик 11 сбрасывается в исходное состояние и тем самым подготавливается к новому циклу работы. По оконча1ши процесса преобразования импуль сный элемент 3 отключает двигатель .исполнительного механизма 2 от источ44Предлагаемое устройство реализовано ля целей угфавления нанесением связуюего на ленту армирующего материала, используемого для изготовления изделий з композиционных материалов намоткой о мокрому способу на намоточном танке. При изготовлении изделий лента арми-. ующего материала движется через узел пропитки, где на нее в избытке наносится связующее. Далее лента проходит через испопнительный механизм 2,удаляющий излищек связующего, и через датчик об-i ратной связи 9, контролирующий объемное содержание связующего в ленте. Регупирующигл воздействием является усилие, с которым пропитанная связующим лента сжимается регулирующим органом исполнительного механизма 2, Переменноа транспортное запаздывание в системе вызвано тем, что скорость, с которой лента проходит расстояние между выходом исполнительного механизма 2 и выходом датчика обратной связи 9, периодически изменяется. Датчик импульсов 1О представляет собой тахометрическое устройство, свй занное с движущей ле1пх й посредством отдельной нити армирующего материала, укладываемой на дорн вместе с лентой. Процесс регутфования осуществляется циклически. В процессе работы регулятора датчик импульсов 1О заполняет импyльca и счетчик 11, коэффициент пересче-га которого выбран таким, чтобы счетчик 11 заполнился при прохождении участком ленты расстояния между входом исполнительного механизма 2 и выходок датчика обратной связи 9, В момент запоянеггая 11 запоминающий блок 12 изменяет свое состояние и запускает преобразователь напряжения во временной интервал 5, преобразующий разность СИРналов задатчика 8 и датчика обратной связи 9 во временной интервал.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адаптивной настройкиРЕгуляТОРА ТОлщиНы пРОКАТА HA ТРЕбуЕМыйпАРАМЕТР | 1976 |
|
SU806187A1 |
| Система автоматического управления торфобрикетным прессом | 1978 |
|
SU734015A1 |
| Регулятор для объектов с запаздыванием | 1977 |
|
SU708302A1 |
| Импульсный регулятор с широтной модуляцией | 1982 |
|
SU1023279A1 |
| Пневматическое устройство управленияпРОцЕССОМ СМЕшЕНия КОМпОНЕНТОВ | 1979 |
|
SU824153A1 |
| Регулятор мощности дуговой электропечи | 1984 |
|
SU1264379A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для регулирования расходов компонентов при смешении | 1977 |
|
SU696422A1 |
| Импульсный регулятор мощности | 1977 |
|
SU731422A1 |
| Устройство для контроля системы регулирования | 1981 |
|
SU972478A1 |
