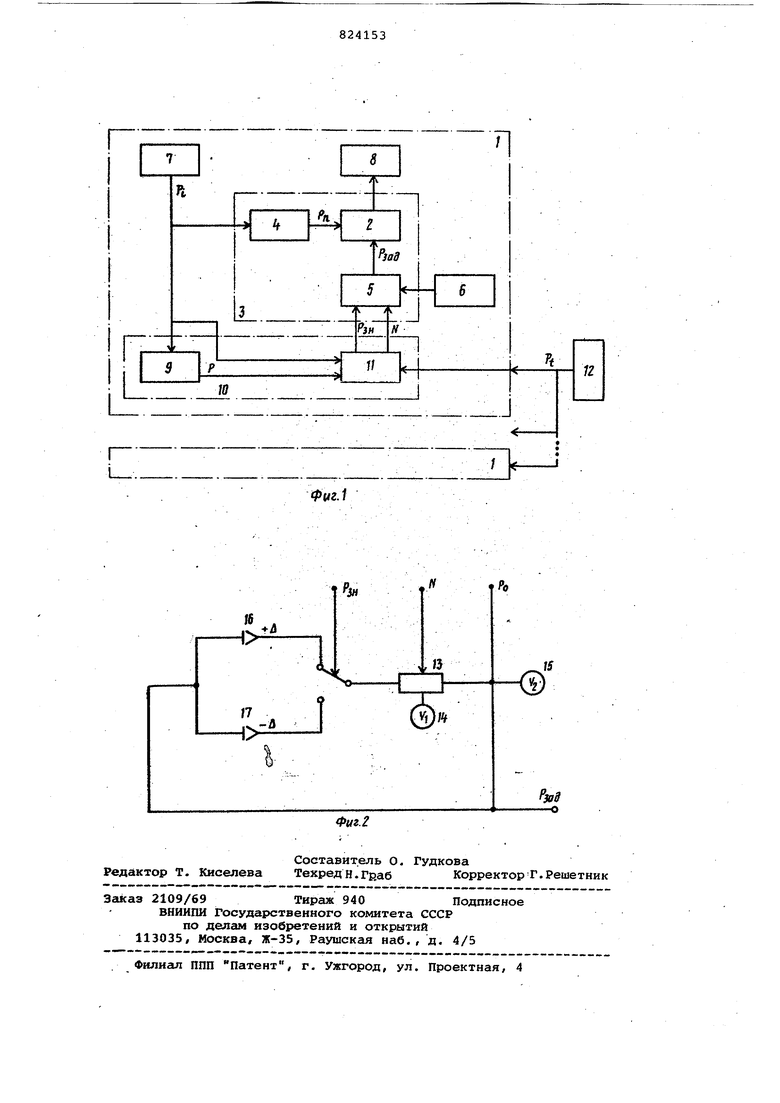
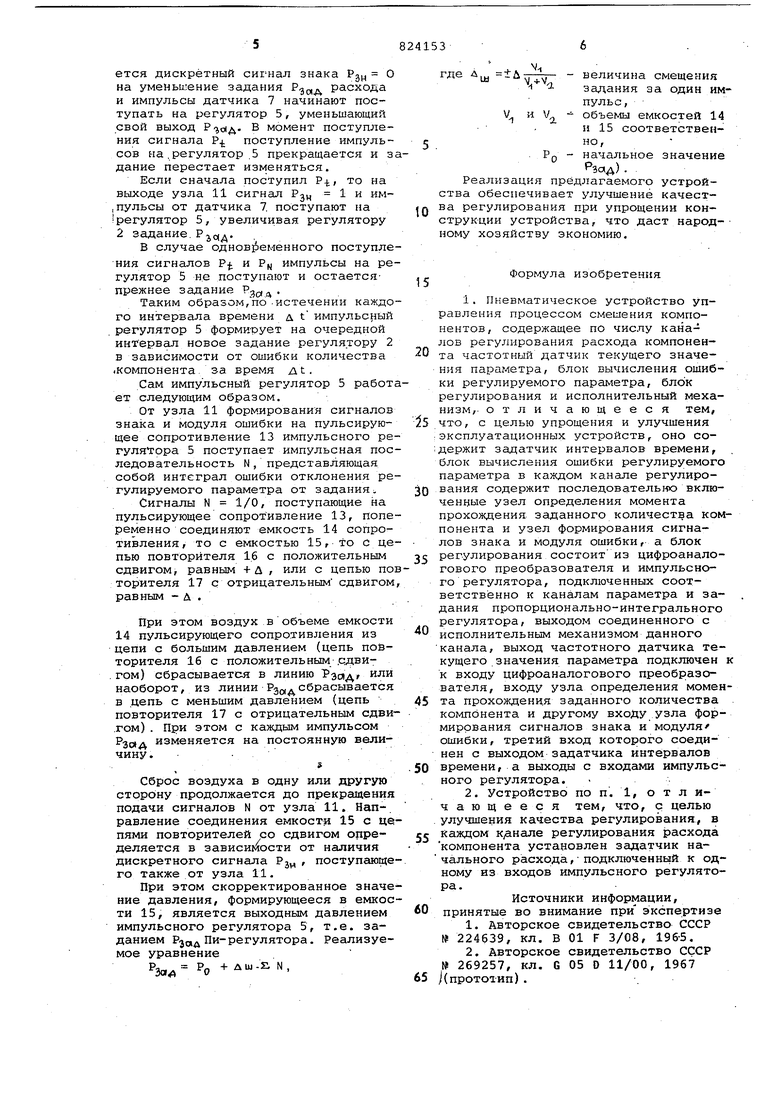
.1 / Изобретение относится к автоматическому управлению и может быть применено для регулирования соотношения потоков в процессе смешения. Известны электронные цифровые устройства для управления процессом смешения при получении многокомпонентной смеси 1, содержащие по числу компонентов частотные датчики расхода, электронный многоканальный цифровой регулятор расхода с входны ми и выходными преобразователями, задатчи ки расхода и исполнительные механизмы. Устройство такого типа обеспечивают более высокую точность регулирования fl. Однако их конструкция является сложной. Наиболее близким к предлагаемому техническим решением яв.йяется устро ство для регулирования параметров технологических процессов, содержащее по каждому каналу регулирования расхода компонента датчик текущего значения параметра, блок вычисления ошибки регулируемого параметра, бло регулирования и исполнительный меха низм 2 . Однако в таких устройствах приме нение электронно-вычислительных специализированных блоков усложняет их конструкцию, затрудняет сочленение, устройства с объектом управ.пения, имеющим в большинстве случаев пневматические исполнительные маханизмы, снижает удобства обслуживания и эксплуатации. Цель изобретения - упрощение конструкции и улучшение эксплуатационных свойств устройства./ Поставленная цель достигается за счет того, что в пневматическом устройстве управления процессом смешения компонентов, содержашем по числу каналов регулирования расхода компонента частотный датчик текущего значения параметра, блок вычисления ошибки регулированного параметра, блок регулирования и исполнительный механизм, введены задатчик интервалов времени, блок вычисления ошибки регулируемого параметра в каждом канале регулирования содержит последовательно включенные узел определения момента прохождения заданного количества компонента и узел формирования знака и модуля ошибки, а блок регулирования состоит из цифроанашогового преобразователя и импульсного регулятора, подключенных соответственно к каналам параметра и задания пропорционально-интерального регулятора, выходом соединенного с исполнительным механизмом данного канала выход частотного датчика те кущего значения параметра подключен к входу цифроаналогового преобразов теля, входу узла определения момента прохождения заданного количества компонента и другому входу узла формирования сигналов знака и модуля ошибки, третий вход которого сое динен с выходом задатчика интервало времени, а выходы с входами импульс ного регулятора. Кроме того, с целью улучшения ка чества регулирования, в каждом кана ле регулирования расхода компонента установлен задатчик начального расхода, подключенный к одному из входов импульсного регулятора. На фиг, 1 приведена блок-схема устройства; на фиг. 2 - схема разве ки импульсного регулятора, входящег в. устройство. Устройство содержит каналы 1 регулирования расхода компонентов, пр порционально интегральный регулятор 2 расхода, блок 3 регулировани цифроаналоговой преобразователь 4, импульсный регулятор 5, задатчик 6 начального расхода, частотный датчи 7 текущего значения параметра, исполнительный механизм 8, узел 9 определения момента прохождения заданного количества компонента, блок 10 вычисления ошибки регулирования параметра, узел 11 формирования сигналов знака и модуля ошибки, зад чик 12-интервала времени. При этом регулятор 5 содержит тульсирующее сопротивление 13 с емкостью 14, емоость 15/ повторитель 16 с положительным сдвигом, повторитель 17 с отрицательным сдвигом. Пневматическое устройство для управления процессом смешения компонентов работает следующим образом Перед пуском устройства, в зависимости от компонентов, участвующих в данном составе смеси и находящиеся между собой в заданном соотношении / подключаются необходимые каналы 1 регулирования. Регулирование расхода по каждому каналу ведется с помощью ИИ-регулятора 2 блока регулирования 3. В его камеру переменно подается сигнал текущего значения параметра Р, от преобразователя 4, а в камеру зада,ния - выход от импульсного регулятора 5, который в данной схеме выст пает в роли задатчика. На выходе регулятора 5, перед включением устройства, с помощью задатчика б устанавливается начсшьное значение задания РЗйдг включении в работу контура регулирования расхода, импульсная последовательность Р., пос тупающая от датчика 7 текущего значения параметра в преобразователе 4, преобразуется в аналоговый сигнал РП и подается на регулятор 2, Ка основании входных сигналов и PJ, регулятор вырабатывает регулирующее воздействие на исполнительный механизм 8. Одновременно импульсная .последовательность от датчика 7 поступает на узел 9 определения момента прохождения Зс1данного количества компонента блока 10 вычисления ошибки регулируемого параметра. Узел 9 представляет собой совокупность счетчика импульсов, цифрового задатчика и схемы совпадения. На цифровом задатчике узла 9 заранее задается задание в цифровом виде, на количество компонента NO, -которое должно пройти за заданный интервал времени, а на счетчике суммируются, импульсы, поступающие от датчика. При совпадении показания с-че-гчика с цифровым задатчиком схемой совпадения формируется дискретный сигнал Р, определяющий момент прохождения заданного количества компонента. Этим сигналом счетчик сбрасывается на нуль, начиная новый цикл счета не теряя ни одного импульса датчика. Одновременно сигнал Р поступает на узел 11 формирования сигналов знака и модуля ошибки блока 10 (для вычисления ошибки-регулирования расхода регулятором 2). С другой стороны измерение равных интервалов времени л t на протяжении всего цикла смешения ведется задатчиком 12 интервалов времени. По истечении каждого интервала д t задатчиком вьвдается сигнал Р., поступающий на вход узла 11 всех блоков 10 вычисления ошибки регулируемого параметра. На вход узла 11 поступает также импульсная последовательность Р от датчика 7. По входным сигналам Р , P.J., Рц узлом 11 вычисляется ошибка, выраженная в пакете импульсов, между заданным и фактическим количеством компонента, проходящего через датчик за Интервал времени. At. Появление первым одного из сигналов Р или РМ служит началом процесса вычисления ошибки узлом 11, т.е. при этом устанавливается знак ошибки-.и начало прохождения пакета импульсов от датчика через узел 11, а поступление второго сигнала прекращает процесс вычисления ошибки, отключая коммутацию импульсной последовательности P-i через узел 11 на импульсный регулятор 5. Например, если сигнал PN поступил до истечения заданного интервала времени u.t (сигнал P-t ), за которое должны пройти NO импульсов, то на выходе узла 11 формируется дискретный сигнал знака О на уменьшение задания расхода и импульсы датчика 7 начинают поступать на регулятор 5, уменьшающий свой выход . В момент поступления сигнала Р. поступление импульсов на .регулятор ,5 прекращается и задание перестает изменяться.
Если сначала поступил Р., то на выходе узла 11 сигнал 1 и им, пульсы от датчика 7. поступают на регулятор 5, увеличивая регулятору 2 задание. PJOIAВ случае одновременного поступления сигналов Р и импульсы на регулятор 5 не поступают и остаетсяпрежнее задание
Таким образом/по.истечении каждого интервала времени д t импульсный регулятор 5 формирует на очередной интервал новое задание регулятору 2 в зависимости от ошибки количества «компонента за время At.
Сам импульсный регулятор 5 работает следующим образом.
От узла 11 формирования сигналов знака и модуля ошибки на пульсирующее сопротивление 13 импульсного регулятора 5 поступает импульсная последовательность N, представляющая собой интеграл ошибки отклонения регулируемого параметра от задания
Сигналы N 1/0, поступающие на пульсирующее сопротивление 13, попеременно соединяют емкость 14 сопротивления, то с емкостью 15, то с цепью повторителя 16 с положительным сдвигом, равным +Д , или с цепью повторителя 17 с отрицательным сдвигом, равным -д .
При этом воздух в объеме емкости 14 пульсирующего сопро.тивления из цепи с большим давлением (цепь повторителя 16 с положительным .С.ДВИ.гом) сбрасывается в линию Тзад или наоборот, из линии РЗО,Дсбрасывается в .цепь с меньшим давлением (цепь повторителя 17 с отрицательным сдви.гом). При этом с каждым импульсом РЗДД изменяется на постоянную величину.
5
Сброс воздуха в одну или другую сторону продолжается до прекращения подачи сигналов N от узла 11. Направление соединения емкости 15 с цепями повторителей со сдвигом определяется в зависимости от наличия дискретного сигнала P, , поступающего также от узла 11.
При этом скорректированное значение давления, формирующееся в емкости 15, является выходным давлением импульсного регулятора 5, т.е. заданием PjQ, Пи-регулятора. Реализуемое уравнение
Рзал РО +Аш.ам,
где д Д:
- величина смещения З- задания за один импульс,
У, и объемы емкостей 14 и 15 соответственно,
PQ - начальное значение
РШД) .
Реализация предлагаемого устройства обеспечивает улучшение качества регулирования при упрощении конструкции устройства, что даст народ- ному хозяйству экономию.
Формула изобретения
15
1.Пневматическое устройство управления процессом смешения компонентов, содержащее по числу каналов регулирования расхода компонента частотный датчик текущего значения параметра, блок вычисления ошибки регулируемого napaNteTpa, блбк регулирования и исполнительный механизм,- отличающееся тем,
что, с целью упрощения и улучшения эксплуатационных устройств, оно содержит задатчик интервалов времени, блок вычисления ошибки регулиру;емого параметра в каждом канале регулирования содержит последовательно включенные узел определения момента прохождения заданного количества компонента и узел формирования сигналов знака и модуля ошибки, а блок
регулирования состоит из цифроаналогового преобразователя и импульсного регулятора, подключенных соответственно к каналам параметра и задания пропорционально-интегрального регулятора, выходом соединенного с
исполнительным механизмом данного канала, выход частотного датчика текущего значения параметра подключен к к входу цифроаналогового преобразователя, входу узла определения момента прохождения заданного количества компонента и другому входу узла формирования сигналов знака и модуля ошибки, третий вход которого соединен с выходом задатчика интервалов
времени, а выходы с входами импульсного регулятора.
2.Устройство по п. 1, отличающееся тем, что, q целью улучшения качества регулирования, в
каждом к анале регулирования расхода компонента установлен задатчик начального расхода, подключеннь1й к одному из входов импульсного регулятора.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 224639, кл. В 01 F 3/08, 1965,
2.Авторское свидетельство СССР I 269257, кл. G 05 D 11/00, 1967
/(прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления температурным режимом печей графитации | 1983 |
|
SU1211710A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ И СТАБИЛИЗАЦИИ ТЕМПЕРАТУРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366998C2 |
| Система автоматического управления процессом мокрого измельчения в замкнутом цикле | 1983 |
|
SU1147432A1 |
| Автоматический регулятор | 1989 |
|
SU1786467A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для регулирования массовых расходов смешиваемых продуктов | 1988 |
|
SU1695273A1 |
| ПОЛУАВТОМАТИЧЕСКОЕ УСТРОЙСТВО КОРРЕКЦИИ ВЫСОТЫ ПОЛЕТА ПРИ ВЗЛЕТЕ И ПОСАДКЕ САМОЛЕТНОГО ЭЛЕКТРОМЕХАНИЧЕСКОГО БАРОМЕТРИЧЕСКОГО ВЫСОТОМЕРА | 2012 |
|
RU2522462C2 |
| Устройство автоматического согласования и контроля режимов многоступенчатых насосных и гидротранспортных установок | 1982 |
|
SU1079568A1 |
| Дискретный регулятор (его варианты) | 1980 |
|
SU960728A1 |