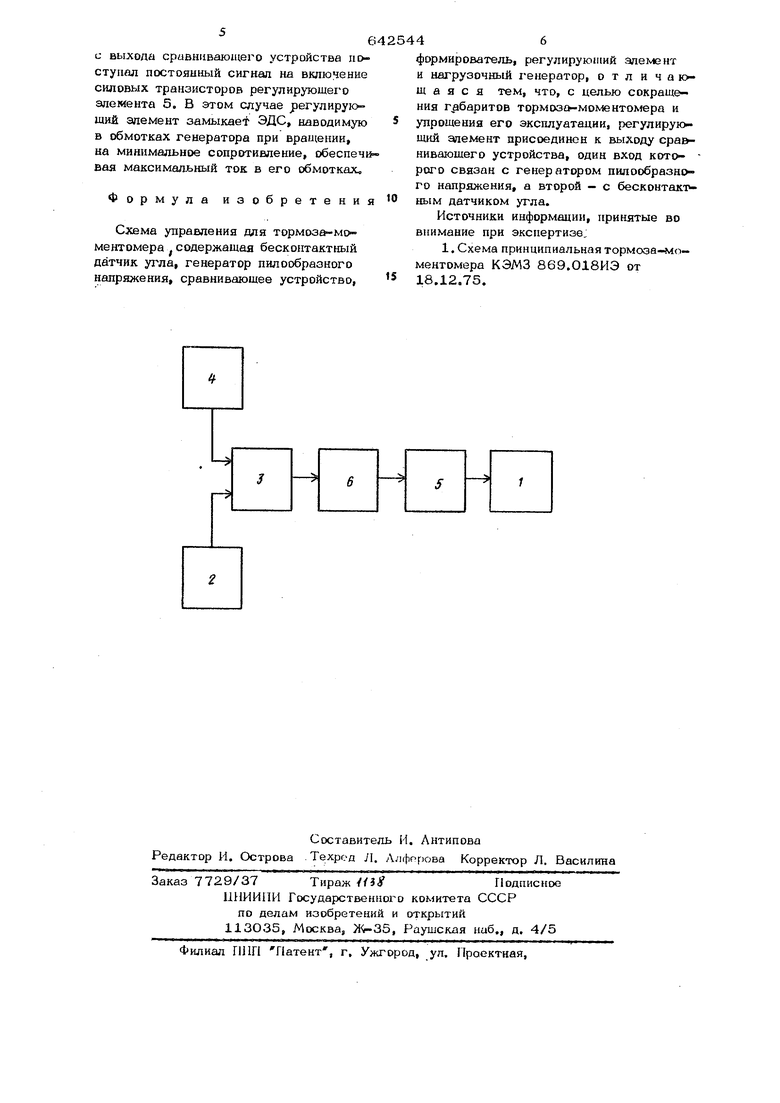
сформированные импульсы, скважность которых при неизменных сигналах от генератора пилообразных напряжений доста точно линейно изменяется в зависимооtn от величины сигнала бесконтактного датчика угла. Последнее, а также выбор частоты сигналов генератора пилообраэнаго напряжения выше частоты автоколебаний, исключает качание подвижной части тормоза- 1оментомера. Формирование сигналов управления в схеме позволяет исттользовать. с иловые транзисторы регулирующего элемента в ключевом режиме, что значительно снижает их нагрев. На чертеже представлена блок-схема устройства. Схема включает в себя на1 рузоч1й)1й генератор 1, генератор пилообразного напршкения 2, сравнивающее устройс1 во 3, бесконтактный датчик угла 4, регулирующий элемент 5 и формирователь 6. При включении испытуемого электродвигателя ротор нагрузочного генератора приходит во вращение. Подвижная система тормоза-моментомера отклон5 ется при некотором угле отклонения. Определяемом конструктивш51м выполнением бесконтактного датчика угла, на выводе последнего появляется сигнал, который после выпрямления подается Ма второй вход сравнивающего устройства. С выхода сравнивающего устройства при этом начинают поступать импульсы, скважность KOTOpJ x определяется величиной сигнала бесконтактного датчика угла. Величина сигнала бесконтактного датчика угла в свою очередь определ5 ется относительь&1м расположением под вижной части тормоза-моментомера. Формирователь 6 предназначен для формирования прямоугольных импульсов с целью обеспечения ключевого режима работы силовых транзисторов регулирую щего элемента. При определенном угловом положении, зависящем от величинызаданного момента нагрузки, подвижная часть тормозер-моментомера приходит в устойчивое равновесное состояние. Отсутствие низкочастотных колебаний подвижной части моментомера относительно равновесного обусловливается, вопервых, тем, что частота пилообразно1 о напряжения выбрана значительно больше частоты автоколебания, и, во-вторых, тем, что .скважность импульсов управле- 4 вырабатываемых путем сравнения ния, сигнала датчика угла с пилообразным напряжением, резко меняется при небсшьших угловых перемещениях подвижгнрй части моментомера относительно равновесного. Использование предлагаемой схемы управления сократит число силовых транзисторов регулирующего элемеята, уменьщит -Габариты тормоза-моментоме- ра за счёт уменьщения суммарной пл1 Щади теплоотводящих радиаторов и исключения демпфера. Исключение регулировочных операций во время испытаний при применении пpeдJIaгaeмoй схемы управления сократит время их проведения и позволит создать автоматические стенды по замеру параметров электродвигателей. Принцип работы тормозного момен- томера, выполненного с применением предлагаемой схемы управления, основан на закономерности, которая заключается в том, что величина тормозного момента, создаваемого нагрузочным генератором при вращении, пропорциональна средней велич(не тока в его обмотках. Средняя вел№чина тока, в свою очередь, определяет ся для линейных систем регулирования - сопротивлением регулирующего элемента, через который замыкается ЭДС, наводимая в обмотках нагрузочного генератора; для импульсных систем регу лирования - скважностью раёоты в импульсном режиме силовых, транзисторов регулирующего элемента. Вал испытуемого электродвигателя при помощи муфты соединяется с ротором нагрузочного генератора 1. На схему управления подается напряжение питания. При етом начинает работать генератор пилообразного напряжения 2. Папряжение с его выхода подается на один из входов сравнивающего устройства 3, в качестве которого может быть применен дифференциальный усилитель. Сигнал с бесконтактного датчика угла 4 (например, трансформаторного типа) в этот момент не поступает. Для обеспечения максимального тормозного момента во время пуска электродвигателя и, следовательно, минимального времени для создания необходимого нахрузочного момента на валу испытуемого двшателя схема уп авления настраиваеть. ся таким образом, чтобы при отсутствии сигнала от бесконтактного датчика угла с выхода сравнивающего устройства nt ступйл постоянный сигнал на включение силовых транзисторов регулирующего элемента 5. В этом случае регулирую щнй элемент замыкает ЭДС, наводимую в обмотках генератора при вращении, на минимальное сопротивление, обеспечи вая максимальный ток в его обмотках. Формула изобретени Схема управления для тормоза-М ментомера содержащая бесконтактный датчик угла, генератор пилообразного напряжения, сравнивающее устройство, формирователь, регулирующий элемент и нагрузочный генератор, о т л и ч а а я с я тем, что, с целью сокращения габаритов тормоз -моментомера и упрощения его эксплуатации, регулирующий элемент присоединен к выходу сра&ниваюшего устройства, один вход кото- рого связан с генератором пилообразн го напряжения, а второй - с бесконтак рным датчиком угла. Источники информации, принятые во внимание при экспертизе: 1. Схема принципиальная тормоза-мо- ментомера КЭМЗ 869.О18ИЭ от 18.12.75.
| название | год | авторы | номер документа |
|---|---|---|---|
| Тормоз-моментомер | 1978 |
|
SU673872A1 |
| Моментомер | 1990 |
|
SU1777012A1 |
| СПОСОБ ТОРМОЖЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2440663C2 |
| Реверсивный управляемый бесконтактный двигатель постоянного тока | 1972 |
|
SU488286A1 |
| УСТРОЙСТВО ДЛЯ ИМПУЛЬСНОГО РЕГУЛИРОВАНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ | 1973 |
|
SU425827A1 |
| РЕГУЛЯТОР ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ЛОКОМОТИВА | 2015 |
|
RU2591550C1 |
| Стабилизатор постоянного напряжения | 1977 |
|
SU775718A2 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ БЕСКОНТАКТНОГО ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 1972 |
|
SU341125A1 |
| Бесконтактный стабилизированный по напряжению генератор переменного тока с комбинированным возбуждением | 2019 |
|
RU2713470C1 |
| РЕГУЛЯТОР ЭЛЕКТРОДИНАМИЧЕСКОГО ТОРМОЗА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2588321C1 |
