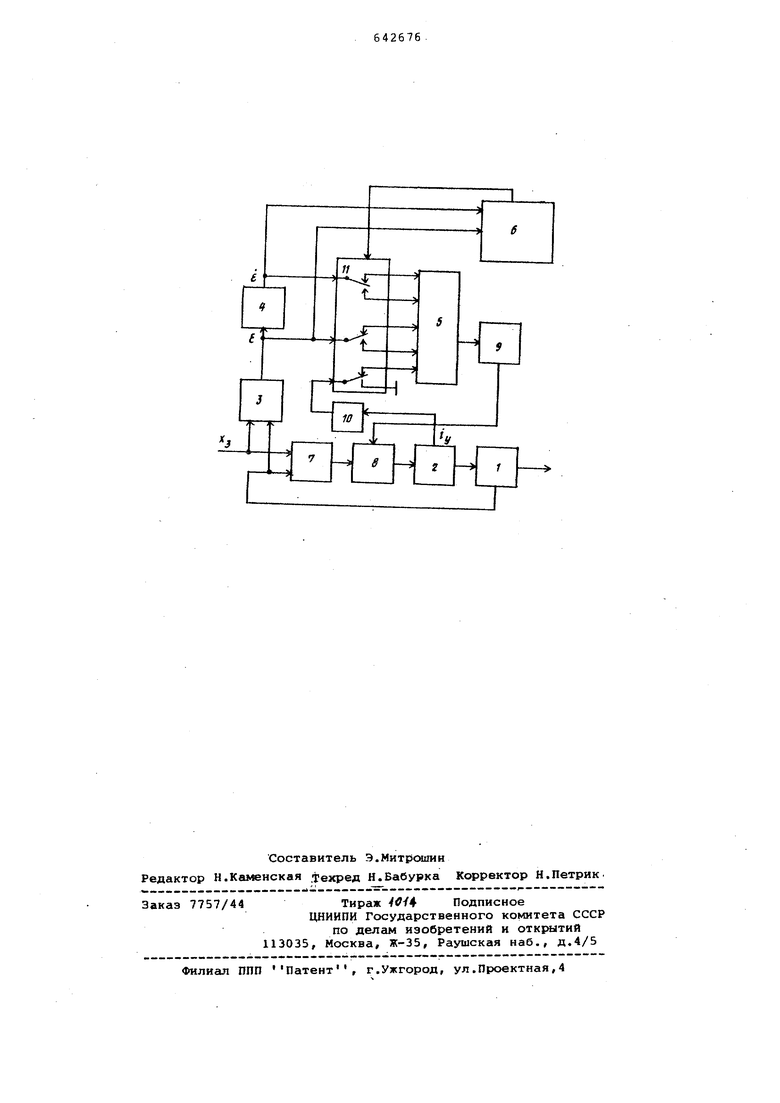
Изобретение отнасится к области автоматического регулирования и может найти применение в следящих сис темах, условий работы которых требу ют достижения повышенных показателей качества при действии дестабили зирующих факторов. Известно устройство,представляющее из себя квазиоптимальную систему управления, содержащую контур самонастройки и основной контур, вы полненный в виде последовате-. соединения первого сумматора, дифференциатора, первого усилителя, функционального преобразователя, пе вого управляемого усилителя, второго усилителя и релейного элемента, соединенного с объектом управления Известно также устройство для/ обеспечения устойчивости и точности работы при наличии дестабилизирующих факторов, которое представляет из себя систему с переменной структурой, содержащую последовательно соединенные входное сравнивающее устройство с блоком звеньев коррекции и устройство формирования сигна ла переключения, а также прсяиежуточный сумматор и исполнительный механизм, при этом между промежуточ ным сумматором и исполнительным механизмом установлен блок дифференциаторов и группа усилителей-преобразователей с логическими коммутационными устройствами f2. Наиболее близкой к данному изобретению является следящая система, содержащая последовательно соединенные блок формирования сигнала сшибки и блок дифференцирования, выходы которых подключены ко входам коммутатора, усилитель и последовательно соединенные исполнительный орган и объект, выход которого подключен ко входу блока формирования сигнала ошибки {з . При действии возмущений это устройство не может обеспечить высокого быстродействия. Целью изобретения является повышение быстродействия и точности системл при действии дестабилизирующих факторов. Поставленная цель достигается введением выпрямителя, синхронного детектора, порогового элемента, функционального преобразователя и переключателя, входы которого подключены к выходам функционального преобразователя, блока формирования сигнала ошибки, блока дифференцирования и коммутатора, а выходы - ко входам усилителя, выход которого через поро говый элемент соединен с первым входом синхронного детектора, второй, вход которого соединен с выходом выпрямителя, а выход со входом исполнительного органа, связанного своим выходом со входом функционального преобразователя, причем вход выпрямителя связан с выходом объекта. На чертеже представлена структур ная схема предлагаемой системы, где приняты следующие обозначения: X,- входное воздействие, g - сигнал ошибки, ё - сигнал скорости изменения сиг нала ошибки, 1у - ток управления исполнительног органа, V - сигнал управления порогового элемента. Схема включает в себя объект управления 1, исполнительный орган 2 с нелинейной характеристикой типа насыщения,блок формирования си нала ошибки 3, дифференциатор 4, усилитель 5, коммутатор 6,ыирямиteль 7, синхронный детектор 8, пороговый элемент 9,..Функциональный преобразователь 10, переключатель 1 Следящая система работает следую адим образом. Пока /V / /tc 6-t-lcgfi/больше некоторог порогового значения на исполнительный орган действует разгоняющий фор сирующий сигнал ef-motiif где . максимальное значение коэффициента передачи выпрямит.еля. При | v / У сра батывает пороговый элемент и на исполнительный орган поступает тормозящий сигнал -o maxfКоммутатор перек.пючает ключевой переключатель при выполнении следую щих условий /е/«ё , где 6 и 6 - некоторне пороговые значения. При Этом сигнал управления поро вого элемента можно записать в сле дующем виде v 4e- «ee- -i Такой сигнал с помощью порогового элемента управляет работой синхроного детектора. В системе возникает скользящий режим и, чтобы не происходило срывов скользящего режима при действии дестабилизирующих факторов, коэффициент k.; изменяется в зависимости от величины i, Такое построение следящей системы позволяет получить быстродействие и точность, близкие к оптимальным при отсутствии перерегулирований в условиях дестабилизирующих факторов. Формула изобретения Следящая система, содержащая последовательно соединенные блок формирования сигнала ошибки и блок дифференцирования, выходы которых подключены ко входам коммутатора, усилитель и последовательно соединенные исполнительный орган и объект, выход которого подключен ко входу блока формирования сигнала ошибки, отличающаяся тем, что, с целью повышения точности и быстродействия системы, она содержит выпрямитель, синхронный детектор, пороговый элемент , функциональный преобразователь и переключатель, входы которого подключаны к выходам функционального преобразователя, блока формирования сигнала ошибки,блока дифференцирования и коммутатора, авыходы - ко входам усилителя, выход которого через пороговый элемент соединен с первым входом синjxpoHHoro детектора,второй вход которого соединен с выходом выпрямителя, а выход :- со входом исполнитвльного органа,связанного своим выходом со вхоRCM функционального преобразователя, причем вход выпрямителя связан с вы.ходом объекта. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 416663, кл. 605 13/02, 1972. 2.Авторское свидетельство СССР №332435, кл. Й05 В 13/02, 1968. 3,Авторское свидетельство СССР ; .519683, кл. 005 В 13/02, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1980 |
|
SU1003016A2 |
| Устройство для управления инерционным объектом | 1975 |
|
SU519683A1 |
| Устройство для управления инерционнымОб'ЕКТОМ | 1979 |
|
SU802924A2 |
| Следящий стабилизатор источник питания | 1976 |
|
SU605204A1 |
| Измеритель частоты гармоническогоСигНАлА | 1979 |
|
SU813289A1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОГОКАНАЛЬНЫМ ВИБРОСТЕНДОМ | 1998 |
|
RU2159949C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1972 |
|
SU334551A1 |
| Устройство для управления дистанционным манипулятором | 1988 |
|
SU1650427A2 |
| Следящая система | 1981 |
|
SU999014A1 |