Изобретение относится к области автоматического управления.
Известны устройства для автоматического управления инерционным объектом при ограниченном управляющем воздействии, содержащие последОВательно соединенные усилитель-преобразователь, исполнительный орган и объект управления. Выход объекта управления соединен с первыми входами усилителяпреобразователя и формирователя сигнала ошибки, второй вход формирователя связан с вторым входом усилителя-преобразователя, выход - с входом дифференциатора, а второй вход исполнительного органа соединен с выходом триггера.
Однако в известных устройствах вид управляющего сигнала получается сложным и он не всегда обеспечивает уменьшение динамической ошибки. Так, нри достаточно больших управляющих сигналах, производная которых несколько меньше порога срабатывания устройства форсировки, форсирующий контур не включается. При этом ощибка системы, состоящая из суммы, имевшейся до изменения задающего воздействия ошибки и ошибки, вызванной изменением задающего воздействия, может превысить допустимое значение.
нием в устройство суммирующего усилителя, первый и второй входы которого соединены соответственно с выходами дифференциатора и формирователя сигнала ошибки, а выход - с входом триггера.
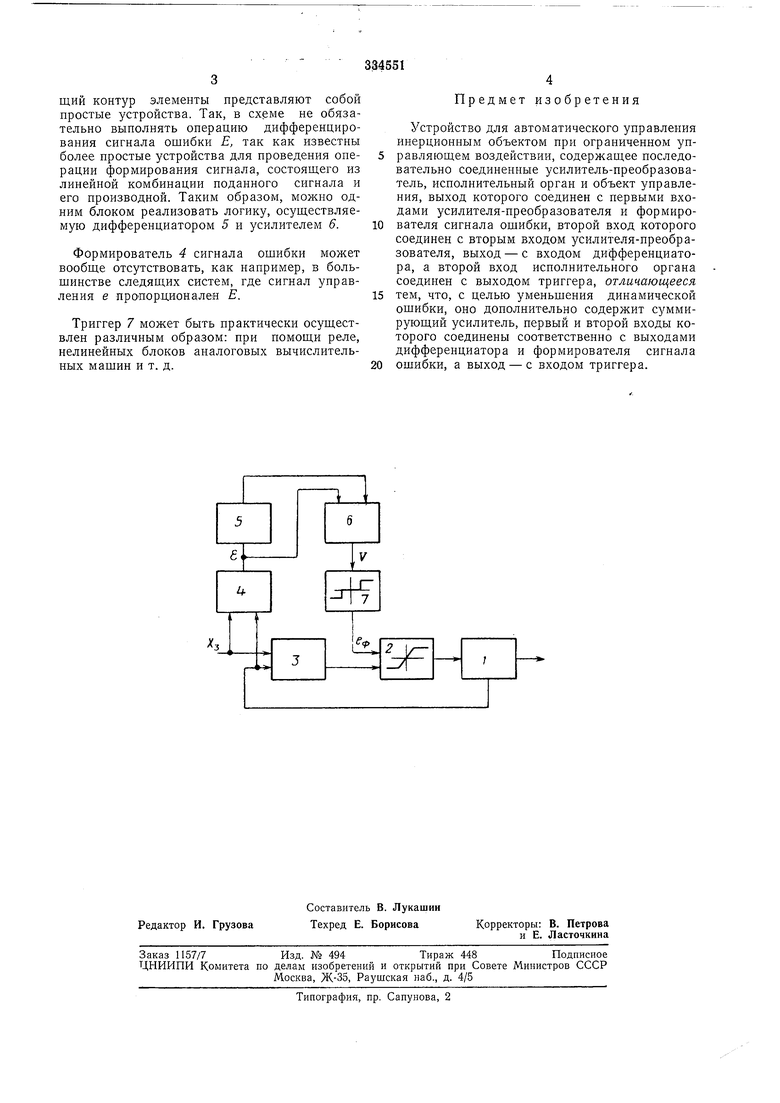
Иа чертеже показана блок-схема устройства для автоматического управления инерционным объектом.
Устройство содержит объект / управления, исполнительный орган 2 с нелинейной характеристикой типа «насыщение, усилитель-преобразователь 5, формирователь 4 сигнала ошибки, дифференциатор 5, суммирующий усилитель 6, триггер 7.
Устройство работает следующим образом.
Пока |V| меньше некоторого порогового значения У действует только основной контур (элементы /, 2, 3}. При срабатывает триггер 7 и подает на вход исполнительного органа 2 форсирующий сигнал бф. В дальнейшем лри убывании |V| до значений, меньщих V, сигнал форсировки отключается.
щий контур элементы представляют собой простые устройства. Так, в схрме не обязательно выполнять операцию дифференцирования сигнала ошибки Е, так как известны более простые устройства для проведения oneрации фюрмирования сигнала, состоящего из линейной комбинации поданного сигнала и его производной. Таким образом, можно одним блоком реализовать логику, осуществляемую дифференциатором 5 и усилителем 6.
Формирователь 4 сигнала ощибки может вообще отсутствовать, как например, в большинстве следящих систем, где сигнал управления е пропорционален Е.
Триггер 7 может быть практически осуществлен различным образом: при помощи реле, нелинейных блоков аналоговых вычислительных машин и т. д.
Предмет изобретения
Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии, содержащее последовательно соединенные усилитель-преобразователь, исполнительный орган и объект управления, выход которого соединен с первыми входами усилителя-преобразователя и формирователя сигнала ошибки, второй вход которого соединен с вторым входом усилителя-преобразователя, выход - с входом дифференциатора, а второй вход исполнительного органа соединен с выходом триггера, отличающееся тем, что, с целью уменьшения динамической ошибки, оно дополнительно содержит суммирующий усилитель, первый и второй входы которого соединены соответственно с выходами дифференциатора и формирователя сигнала ошибки, а выход - с входом триггера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления инерционным объектом | 1975 |
|
SU519683A1 |
| Устройство для управления инерционным объектом | 1981 |
|
SU1007084A1 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1982 |
|
SU1084729A1 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1978 |
|
SU930251A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО | 1967 |
|
SU196154A1 |
| СПОСОБ УПРАВЛЕНР1Я ИНЕРЦИОННЫМ ОБЪЕКТОМ ПРИ ОГРАНИЧЕННОМ УПРАВЛЯЮЩЕМ ВОЗДЕЙСТВИИ | 1967 |
|
SU196153A1 |
| Устройство для автоматического управления инерционными объектами при ограничении управляющего воздействия | 1979 |
|
SU864245A2 |
| Устройство для автоматического управления инерционным объектом при ограниченном управляющем воздействии | 1985 |
|
SU1273877A2 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| Устройство для управления инерционнымОб'ЕКТОМ | 1979 |
|
SU802924A2 |
