(54) СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электродвигатель | 1983 |
|
SU1132329A1 |
| Бесконтактный регулируемый электропривод | 1990 |
|
SU1830598A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1983 |
|
SU1089747A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1697055A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
| Следящая система | 1978 |
|
SU842701A1 |
| Бесконтактный регулируемый электропривод | 1982 |
|
SU1075344A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
Изобретение относится к автоматическому регулированию и ьюжет быть использовано в радиотехнике и приборостроении. Известна следящая система, содержащая датчик угла, двигатель, усилитель, элемент сравнения, синхронный генератор, преобразователи код - напряжение, множительные устройства/ сумматор Недостатком этой системы является ее Мсшая точность, обусловленная пог решностью формирования корректирующе го сигнала. Наиболее близкой по назначению и технической сущности к изобретению является следящая система, содержащая последовательно соединенные синусно-косинусный трансформатор (СКТ) датчик, суммирующий усилитель, двигатель, редуктор и СКТ-приемник,выход приемника подключен к второму входу суммирующего .усилителя. Кроме того, система содержит последователь но соединенные синхронный тахогенера тор, выпрямитель, блок умножения, датчик полярности сигнала рассогласо вания, элемент задержки 2. Недостатком известной следящей системы является малая точност ьотра . :ботки сигнала рассогласования, обусловленная тем, что полярность koppeKтирующего сигнала меняется не при per верее двигателя, а при изменении полярности сигнала рассогласования следящей системы. Элемент задержки,включенный в систему, не обеспечивает в достаточной степени точного совпадения моментов реверса двигателя и изменения полярности сигнала коррекции вследствие того, что электромеха ническая постоянная времени двигателя, по которой определяется оадёржка сигнала элементом задержки, не является величиной постоянной, а меняется в зависимости от величинысигнала упй ав:;ения (для двигателей переменного тока) , от момент.а нагрузки и т.д. Целью изобретения является повышение точности системы за счет уменьшения погрешности определения полярнос ти корректирующего сигнала. Поставленная цель достигается тем, что в следящую систему, содержащую последовательно соединенные датчик углового положения, сут-мирующий уси-; литель, двигатель, редуктор, приемник углового положения, первый выход которого подключен к второму входу суммиру.-ощего усилителя, а также подключенные к пиходу двигателя последовательно соединенные синхронный тахогенератор, первый выпрямитель и первый блок умножения, выходом соединенный третиим входом суммирующего усилителя, вредены два выпрямителя, два фазчувствительных ВЕлпрямителя, два компаратора и последовательно соединен1 ь.е комм-утатср, дифференциатор и второй блок умножения, выход которого соединен с вторЕЛ - входом первого блока умножения, а второй вход - с выходом первохо компаратора, два входа которого соединены непосредственно с вторым и третьим входами комм татора, а также через первый и второй фазочувствительные выгфямитоли соответственно с первым и нторым выходами приемника углового положения и с вхо/дами соответственно второгс и третьегО выпрямителей, выходдами подключенных к входам второго компаратора, выход которого соединен с входом коммутатора,
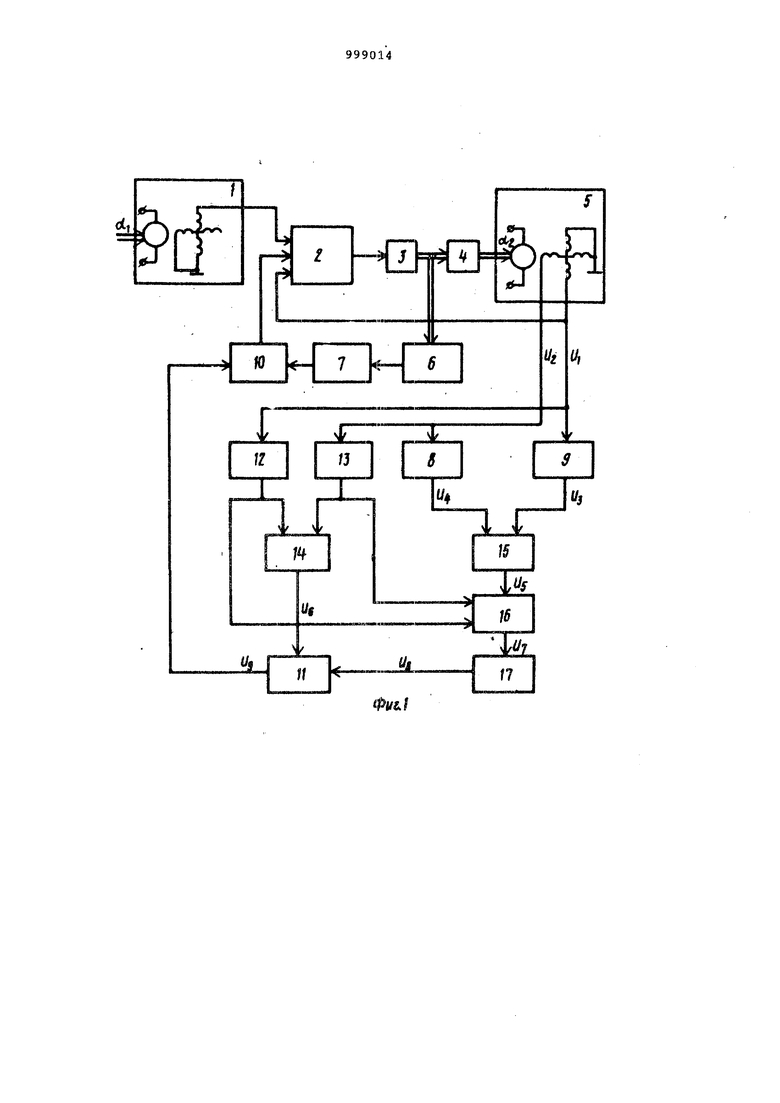
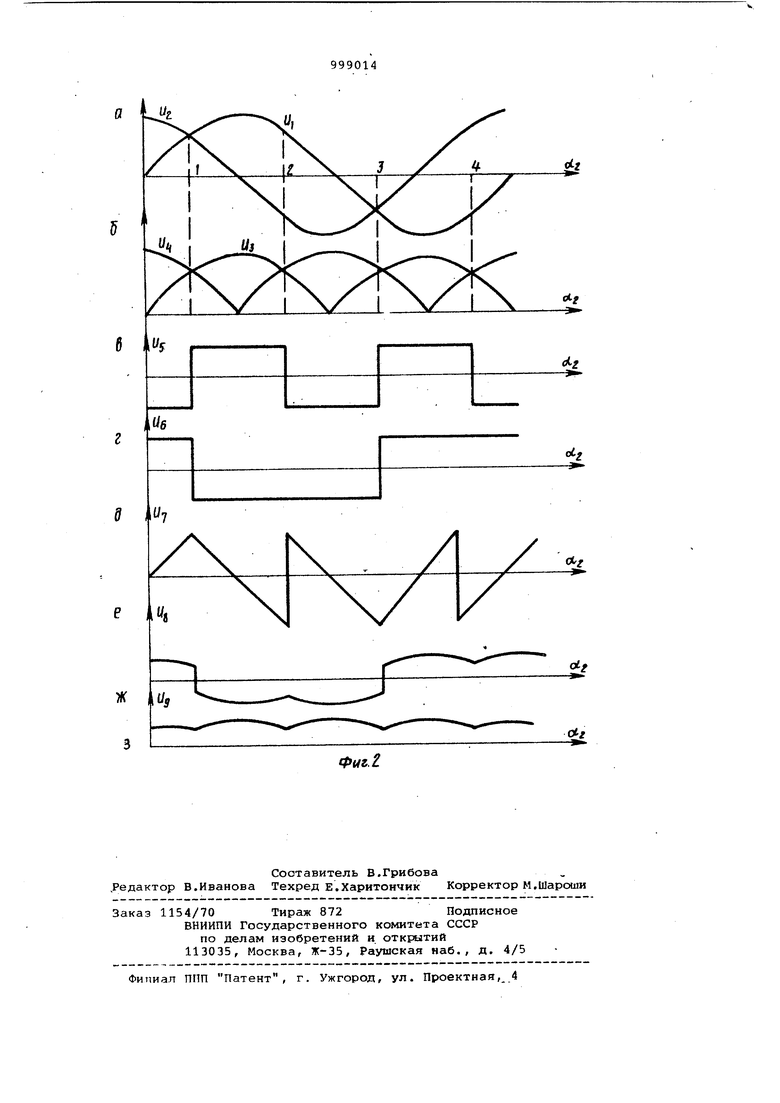
На фиг. 1 представлена ф/нкпиональная схема системы; п.л фпг„ 2 диаграммы, поясняющие принцип райотгл пред.иагаемой следящей системы.
Следя11;ая система (фкг. 1) содорл(ит датчик 1 углово10 положения, суммиру ощий уси.читель 2, двигатель 3, редуктор 4, приемник 5 углового положения, сипхроннглй тахогенератор б, выпрямите;1и 7-9, блоки умножеп.ия 10 и 11, фагочувствптельпые выпрям1-ггели (ФЧВ) 12 п 13, компараторы 14 и 15, кo лутатор 16, дифферсгпциатор 17 След Г11;ая систем i работает следуюа.им обрагом.
При входном угле cncTeNn-j oL, отличного от выходп-юго угла dz г сигналы, поступающие от датчика 1 углового положения -- синусно-косинусного трансформатора (СКТ ) и СКТ-приемпика 5 на входы суммирующего усилителя 2, различны. Напряжение рассогласования, равное разности сигналов, усиливается суммирующим усилителем п поступаетна двигатель 3, который отрсКЗатывает это напряжение через реду1-;тор 4 до совмещения выходной оси с входной (Ы-)- ci.2
Устойчивость и высокие качественные псчазателй следящей системы обеспечиваются за счет отридатель -:ой обратной связи по скорости, которая выполнена на синхр -нном тахогенераторе 6. Напряжение с тахогенератора 6, пропорциональное скорости двигателя 3. выпрямляется первым выпрямителем 7 и поступает на перВЕЛй вход первого блока умножеьия 10.
Для определения направления вращения выходной оси двигателя следящей системы используется информация, снимаемая с СКТ-приемника 5, Эпюры напряжении на выходе приемника 5 СКТ
U- и и приведены на фиг, 2, А. Эти напряжения поступают на второй и третий выпрямители 9 и 8, .де они выпряг.4:1яются {фпг. 2, Б). Напряжения и J и и с выходов второго и третьего выпрЯ1У ителей 8 и 9 поступают на входы второго компаратора 15, Второй компаратор 15 осуществляет сравнение
напряжений U з и U и формирует
напряжение и 5 (фиг. 2, г), полярность которого определяется соотношением
амплитуд напряжений Uj
и и.
При
и ,
,, и напряжение имеет положительную гтолярность, при () и напряжение - отрицательное.
Напряжения U и U2 с выхода СКТприемника 5 подаются также на входы nOt-Horo и второго ФЧВ 12 и 13, которые осуществляют выпрямление этих напряжений с учетом их фазы. Напряжапия с выходов ФЧВ 12 и 13 поступают па входы первого компаратора 14,сравниваюи1его эти сигналы. Выходное напряжение и первого компаратора 14 {фиг. 2,д) подается на второй вход irroporo блока ум(1ожения 11.
Сигналы с выходов ФЧВ 12 и 13 поступают на второй и третий входы коммутс)тора 16 , который пропускает напряжение и или U2 в зависимости от ве 1П-1чины угла . Коммутатор 16 управляется нагряжёнием U j таким образом, что при положительном иапряже;иии и с, на выход ког-ф1утатора 16 прои.
ходит напряжение
при отрицаа
На фиг. 2,е изображена тельном и
I диаграмма напряжения U-, на выходе коммутатора 16. Как BHIIHO из диаг; .-MJ, на выход коммутатора 16 прохо : те участки напряжений U- и U 2,- кс.эрые имеют ярко выраженные возрастающий пли убывающий характер.
11апряжение U-| дифференцируется к в результате на ВЕа1ходе дифференциатора 17 формируется сигнал Ug 1,фйг, 2,ж), который затем подается на вход второго блока умножения 11, При перемножении сигналов (Jg и U(, на выходе блока 11 формируется напряжение Ug (фиг. 3, З), полярность КОТОРОГО определяется направлением вращения выходной оси двигателя системы. При изменении направления вращения выходной оси полярность напряжений н различных участках напряжения Ug изменится на противоположную. Соответственно изменится и полярность напряжения и
9В результате перемножения напряжений с выходов первого выпрямителя 7 и второго блока умножения 11 в блоке 10 формируется-напряжение, амплитуда которо о пропорциональна скорости вращения выходного вала двигателя .3, а полярность соответствует направлению его вращения, .Сформированный та КИМ образом сигнал обратной связи по
скорости обеспечивает эффективную коррекцию следящей системы.
Положительный эффект от использования предлагаемого технического решения задачи состоит в том, что при сохранении положительных свойств известной следящей системы (простота и высокая Нсшежностъ ), предлагаемая следящая система обеспечивает увеличение точности отработки входного воздействия за счет исключения погрешности при определении сигнала коррекции системы путем формирования полярности сигнала обратной связи от ,СКТ-приемника, установленного на выходной оси двигателя следящей системы.
Наличие дополнительных элементов предлагаемой следяшей систеъ л - выпрямителей, компараторов, ФЧВ, кош-тутатора, блоков дифференцирования и умножения, которые выполняются на совре юнной элементной базе, не вносит усложения в систему.
Макетирование известной следящей системы показало, что динамическая ошибка системы составила 20. Причем ошибка увеличивается до 30 при увеличении момента нагрузки в 2 раза.
При макетировании предлагаемой следящей системы получена динамическая ошибка 12, которая при изменении момента нагрузки не изменяется.
Таким образом, точность предлагаемой следящей системы примерно в 2 раза выше, чем у известной следящей системы. Формула изобретения
Следящая система, содержащая последовательно соединенные датчик углового положения, суммирующий усилител-д, двигатель, редуктор, приемник углового положения, первый выход которого подключен к второму входу суммирующего усилителя,а также подключенные к выходу двигателя последовательно соединенные синх- онный тахогенератор, первый выпрямитель и первый блок умножения, выходом соединенныд с третьим входом суммирующего усилителя, отличаю щ а яс я тем, что, с целью повышения точности системы, в нее введены два выпрямителя , два фазочувствительных выпрямителя, два компаратора и после5 довательно соединенные коммутатор, дифференциатор и второй блок умножения, выход которого соединен с вторым входом первого блока умножения, а второй вход - с выходом первого ком0 паратора, два входа которого соединены непосредственно с вторым и третьим входами коммутатора, а также через первый и второй Фазочувствительные выпрямители соответственно с пер5 вым и вторым выходами приемника углового положения и с,входами соответственно второго и третьего выпрямите лей, выходами подключенных к входам второго компаратора, выход которого
Q соединен с входом кокмутатора.
Источники информации, принятые во внимание при экспертизе
свидетельство СССР 05 В 11/12,,1977.
свидетельство СССР 05 В 11/01, 1978 5
X г
ж
