Изобретение относится к робототехнике, может быть испопьзовано при создании дистанционных манипуляторов и является усовершенствованием устройства по авт св. № 1355481
Цель изобретения - повышение надежности за счет обеспечения защиты исполнительного органа от поломок
На чертеже представлена функциональная схема устройства
На схеме указаны задающий орган 1, блок 2 нелинейных преобразователей, блок 3 нелинейных преобразователей первый 4 и второй 5 блоки сумматоров, соответственно сумматоры 6. блок 7 логического дифференцирования, дифференциаторы 8, блок 9 элементов согласования, элементы 10 согласования, блок 11 интеграторов, интеграторы 12, блок 13 приводов, приводы 14, исполнительный орган 15, компараторы 16, первые 17 и вторые 18 ключи, сумматоры 19 и 20, двигатели 21, датчики 22 положения.
Устройство работает следующим образом.
Работа устройства на границе свободной зоны определяется режимом работы следящих приводов 14, которые работают
либо в двух режимах управления (позиционном, скоростном) от задающего органа 1, либо в режиме работы Упор, когда выходной вал двигателя 21 заторможен, т.е. не имеет возможности перемещаться из-за жесткого внешнего воздействия. Изменение режима работы привода 14 основано на анализе абсолютной величины ошибки слежения двигателя 21 за управляющим сигналом с интегратора 12.
Сигнал АХ ошибки слежения снимается с выхода сумматора 20, т.е. с второго выхода следящего привода 14. При отсутствии внешних жестких воздействий абсолютная величина ошибки слежения не превышает значения
, (1)
где Ki - коэффициент пропорциональности;
К2 - произведение коэффициентов передачи сумматора 20, двигателя 21 и датчика 22;
йМакс - абсолютное значение максимальной скорости выходного вала двигателя 21.
fe
ON СЛ О
Јь
ю
XI
ю
Величина ошибки слежения даже на максимальной скорости в правильно спроектированном следящем приводе 14 не превышает десятых долей градуса.
При работе в режиме Упор величина ошибки может достигать единиц или даже десятков градусов. Таким образом, превышение величины ошибки А X значения, определяемого выражением (1), служит фактором для перехода работы следящего привода 14 из режима работы от задающего органа 1 в режим работы Упор.
От задающего органа 1 устройство работает следующим образом. Оператор, воздействуя на задающий орган 1, вырабатывает сигнал Uax 1, который поступает на блок 3 типа зона нечувствительности и на первый вход сумматора 6 блока 4 Если абсолютная величина сигнала UBx 1 находится в пределах зоны нечувствительности, то этот сигнал через сумматор 6 блока 4 подается на вход логического дифференциатора 8
В логическом дифференциаторе 8 сигнал UBX 1 дифференцируется и его знак сравнивается со знаком полученной производной UBX 1. Если знаки UBx i и UBx 1 совпадают, то сигнал производной Овх1 через сумматор б блока 5, нормально замкнутый ключ 17 и сумматор 19 подается на интегратор 12, выходной сигнал которого отслеживается следящим приводом 14, т.е. угловое положение звена (i-й степени подвижности) исполнительного органа 15 изменяется на величину, пропорциональную значению силового воздействия оператора на задаю щий орган 1.
Если абсолютная величина сигнала UBX 1 находится за пределами зоны нечувствительности блока 3, а знаки самого сигнала UBX 1 и его производной разные, на выходе логического дифференциатора 8 сигнал отсутствует. Сигнал на выходе интегратора 12 не меняется и не меняется угловое положение соответствующего звена исполнительного органа 15, Если абсолютная величина сигнала превышает зону нечувствительности блока 3, например, на величину
Дивх 1 Uoi UBX 1,
где Uoi значение зоны нечувствительности блока 3, то на выходе блока 3 появляется сигнал Us, пропорциональный сигналу A UBX 1. Сигналы UBX 1 и Us подаются на блок 4 с разными знаками, поэтому на выходе блока 4 выделяется сигнал, по величине совпадающий со значением зоны нечувствительности блока 3 Uoi, т.е. неизменный по величине, тогда сигнал на выходе логического дифференциатора 8, подаваемый на второй вход второго сумматора 6 опока 5,
равен нулю. На его выходе сигнал пропорционален сигналу Uai, который через нормально замкнутые контакты ключа 17 и сумматор 19 подается на интегратор 12. На
выходе интегратора 12 сигнал изменяется со скоростью, пропорциональной величине U31. Поэтому соответствующее звено исполнительного органа 15 перемещается со скоростью, пропорциональной превышению
силового воздействия оператора на задающий орган некоторого порогового значения.
В режиме работы Упор следующего привода угловое положение двигателя 21 не
зависит от воздействия оператора на задающий орган 1 Здесь ошибка А X слежения превышает величину по выражению (1) и происходит срабатывание двухпорогового компаратора 16. Его выходной сишал размыкает нормально замкнутые контакш ключа 17 и замыкает нормально разомкну- )ые контакты ключа 18 При этом сигнал АХ через сумматор 19 поступает на вход интегратора 12 Выходной сигнал интегратора начинает изменяться до тех пор, пока значение ошибки ЛХ не с i а н е т удовлетворять условию (1) После зтого устройство переходит в режим работы следящего привода 14 от задающею органа 1 беч возможны-- поломон исполнительного органа 15
Применение изобретения позволяет при соударении исполнительного органа с абсолютно жестким препятствием типа
стена, упор и т п исклю 1игь его поломку, так как время действия реакции со стороны препятствия очень мало и определяется быстродействием переключения ключей блока 9 согласования
Формула изобретения 1 Устройство для управления дистанционным манипулятором по авт ев № 1355481, оглииающееся тем что, с целью
повышения надежности устройства, оно дополнительно содержит бпок элементов согласования, через который выходы второго блока сумматоров соединены с входами блока интеграторов, а вторые входы блока
элементов согласования подключены к вто рым выходам блока приводов.
2. Устройство по п.1, о г л и ч а ю щ е е- с я тем, что каждый элемент согласования содержит первый ключ и последовательно соединенные компаратор, второй ключ и
сумматор, выход которого подключен к выходу элемента согласования, а второй вход - к выходу псрвсго кпюча, соединенного первым входом с первым входом злемента согласования, а вторым входом - с выхо- . к второму входу второго ключа и к второму дом компаратора, вход которого подключен входу элемента согласования.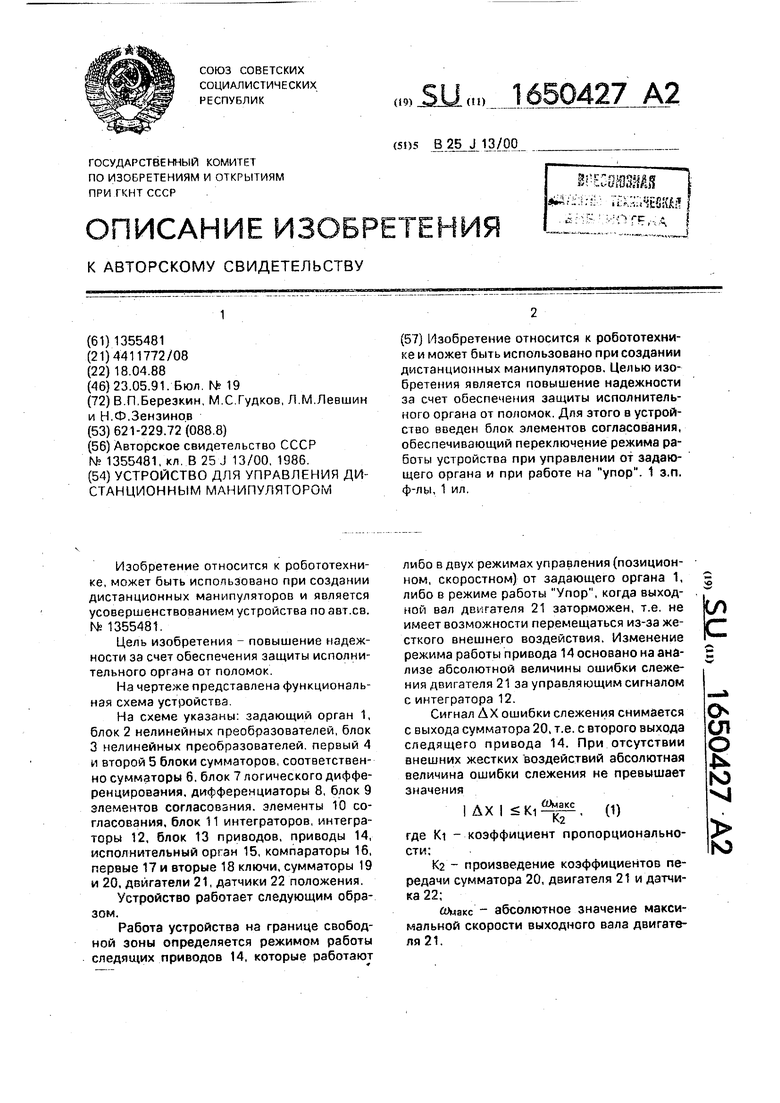

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Устройство для управления дистанционным манипулятором | 1980 |
|
SU883862A2 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| Устройство для регулирования скорости двигателя | 1981 |
|
SU970331A2 |
| Устройство для управления дистанционным манипулятором | 1982 |
|
SU1112341A2 |
| Устройство для компенсации зоны нечувствительности | 1988 |
|
SU1585780A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |

Изобретение относится к робототехнике и может быть использовано при создании дистанционных манипуляторов. Целью изобретения является повышение надежности за счет обеспечения защиты исполнительного органа от поломок. Для этого в устройство введен блок элементов согласования, обеспечивающий переключение режима работы устройства при управлении от задающего органа и при работе на упор. 1 з.п. ф-лы, 1 ил
4
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
