Изобретение относится к подъемно-транспортному машиностроению и касается конструирования захватных устройств для столбов.
Известно захватное устройство для столбов, содержащее стрелу, смонтированную на портале самоходного ср едства с поперечной балкой и стойками, грузозахватный орган и силовые цилиндры управления стрелой н подъемом столбов (1).
Недостаток устройства - длительность процесса установки столбов и низкий диапазон обслуживания.
Цель изобретения - ускорение установки столбов и повышенне диапазона обслуживания.
Для этого захватное устройство снабжено вертикальной и наклонной тягами, опорной и стреловой рамами с горизонтальными осями, при этом вертикальная н наклонная тяги установлены соответственно параллельно стойкам и консольным балкам, образующим с упомянутыми стойками шарнирные параллелограммы, причем консольные балки стрелы связаны с опорной рамой с возможностью вертикального и горизонтального перемещений, а грузозахватный орган связан со стреловой рамой с возможностью подъема и поворота.
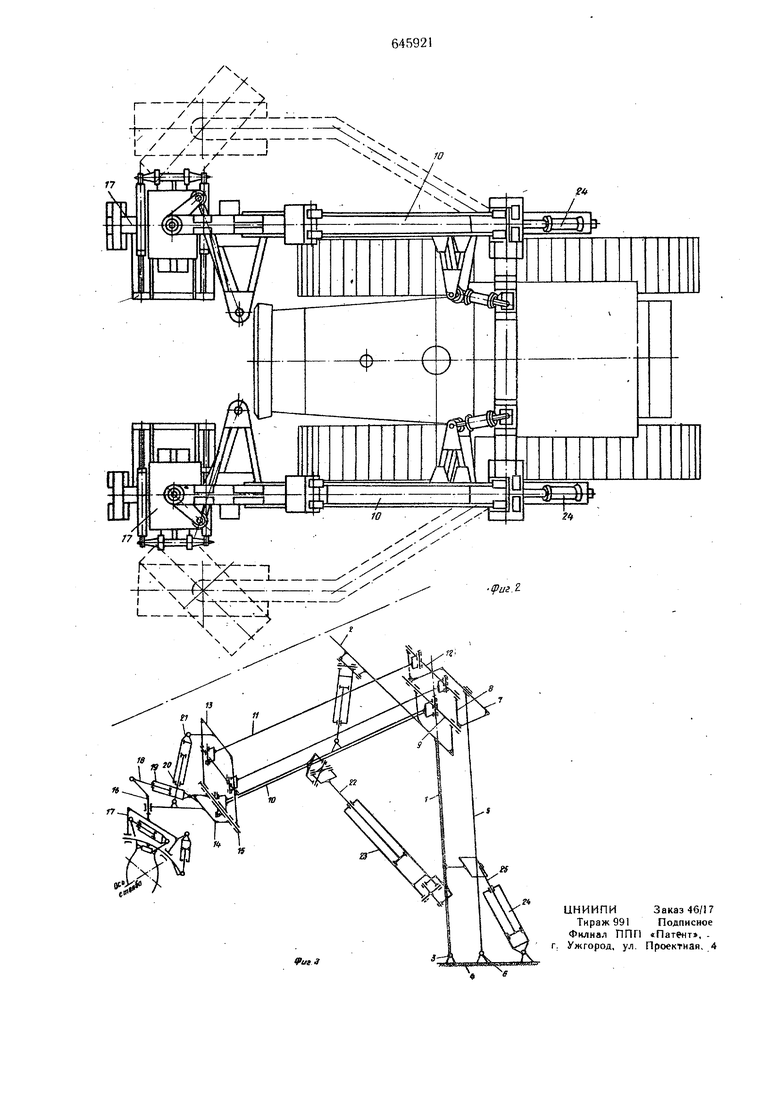
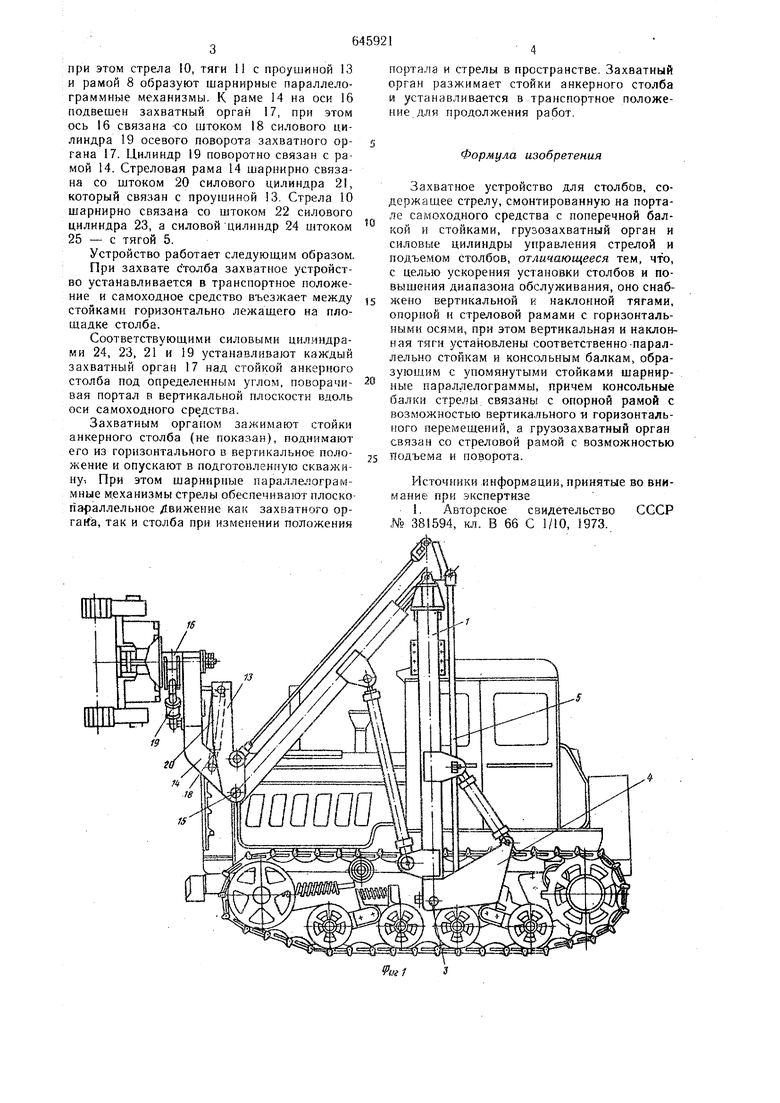
На фиг. I схематически изображено описываемое устройство, вид сбоку; на фнг. 2 - то же, внд сверху; на фиг. 3 - кинематическая схема устройства.
Захватное устройство содержит портал с вертикальными стойками I и поперечиной 2, при этом стойки 1 посредством шарниров 3 опираются на раму 4 самоходного средства.
Каждая стойка 1 снабжена вертикальной тягой 5, которая одним концом осью 6 шарнирно связана с рамой 4, а другим - осью 7 с опорной рамой 8. Стойка 1 совместно с. тягой 5, рамой 8 н рамой 4 образуют шарнирный параллелограмм.
В верхней части стоек 1 на горизонтальной оси 9 установлены рама 8 и стрела 10.
Параллельно стреле 10 установлены наклонные тяги il, одними концами шарнирно
связанные с осью 12 рамы 8, а другими - с проушиной 13, которая в свою очередь связана со стреловой рамой 14. Стреловая рама 14 связана со стрелой 10 осью 15, при этом стрела 10, тяги И с проушиной 13 и рамой 8 образуют шарнирные параллелограммные механизмы. К раме 14 на оси 16 подвешен захватный орган 17, при этом ось 16 связана -со штоком 18 силового цилиндра 19 осевого поворота захватного органа 17. Цилиндр 19 поворотно связан с рамой 14. Стреловая рама 14 шарнирно связана со штоком 20 силового цилиндра 21, который связан с проушиной 13. Стрела 10 шарнирно связана со штоком 22 силового цилиндра 23, а силовой цилиндр 24 штоком 25 - с тягой 5. Устройство работает следующим образом. При захвате столба захватное устройство устанавливается в транспортное положение и самоходное средство въезжает между стойками горизонтально лежашего на площадке столба. Соответствующими силовыми цилиндрами 24, 23, 21 и 19 устанавливают каждый захватный орган 17 над стойкой анкерного столба под определенным углом, поворачивая портал в вертикальной плоскости вдоль оси самоходного средства. Захватным органом зажимают стойки анкерного столба (не показан), поднимают его из горизонтального в вертикальное положение и опускают в подготовленную скважину-. При этом шарнирные параллелограммные механизмы стрелы обеспечивают плоскопараллельное Движение как захватного орrarfa, так и столба при изменении положения портала и стрелы в пространстве. Захватный орган разжимает стойки анкерного столба и устанавливается в.транспортное положение для продолжения работ. Формула изобретения Захватное устройство для столбов, содержащее стрелу, смонтированную на портале самоходного средства с поперечной балкой и стойками, грузозахватный орган и силовые цилиндры управления стрелой и подъемом столбов, отличающееся тем, что, с целью ускорения установки столбов и повышения диапазона обслуживания, оно снабжено вертикальной и наклонной тягами, опорной и стреловой ра.мами с горизонтальными осями, при этом вертикальная и наклонная тяги установлены соответственно-параллельно стойкам и консольным балкам, образующим с упомянутыми стойками шарнир- . g параллелограммы, причем консольные балки стрелы связаны с опорной рамой с возможностью вертикального я горизонтального перемещений, а грузозахватный орган связан со стреловой рамой с возможностью подъе.ма и поворота. Источники информации, принятые во внирлание при экспертизе 1. Авторское свидетельство СССР № 381594, кл. В 66 С 1/10, 1973.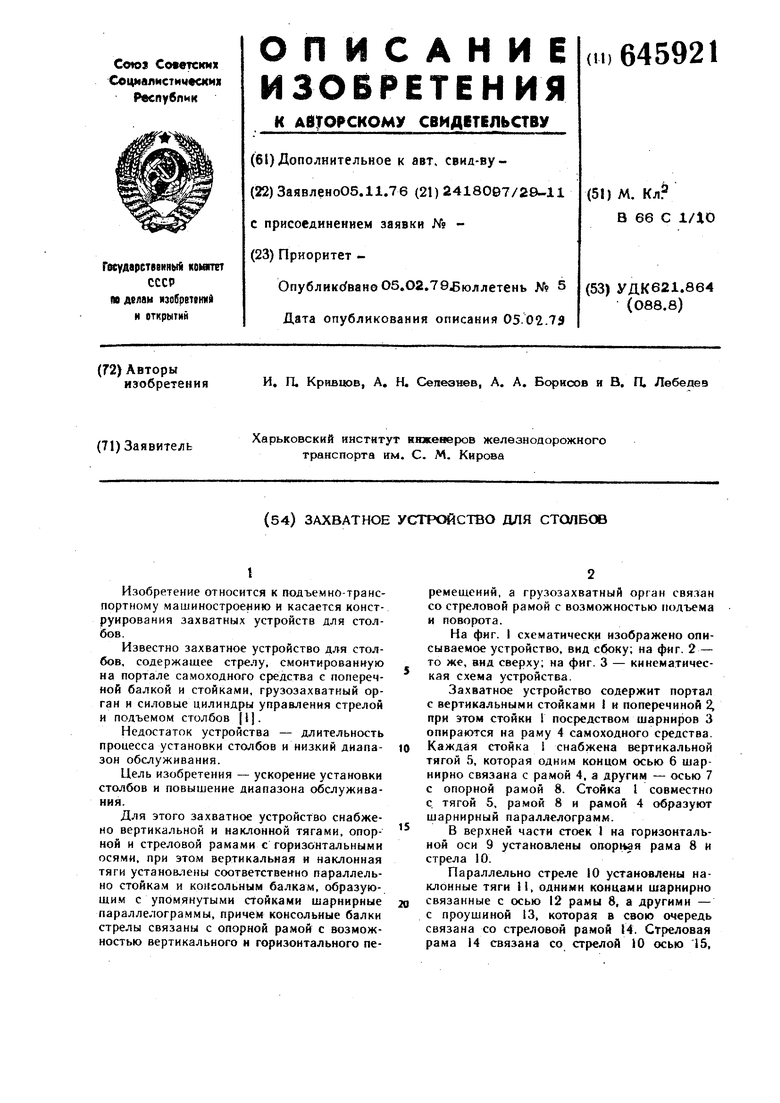
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЖЕНЕРНАЯ ГУСЕНИЧНАЯ МАШИНА НА БАЗОВОМ ТАНКОВОМ ШАССИ | 2004 |
|
RU2283467C1 |
| АГРЕГАТ ДЛЯ УДАЛЕНИЯ ИЗ ГРУНТА АНКЕРОВ И ФУНДАМЕНТОВ ОПОР КОНТАКТНОЙ СЕТИ ЖЕЛЕЗНОЙ ДОРОГИ | 2001 |
|
RU2280734C2 |
| Навесное грузозахватное оборудование к погрузчику | 1975 |
|
SU555046A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| ИЗВЛЕКАТЕЛЬ ФУНДАМЕНТОВ ИЗ ГРУНТА | 1999 |
|
RU2170302C2 |
| Крановая установка | 1986 |
|
SU1361103A1 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| Колесный погрузчик-штабелер | 1969 |
|
SU454160A1 |
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2158708C1 |