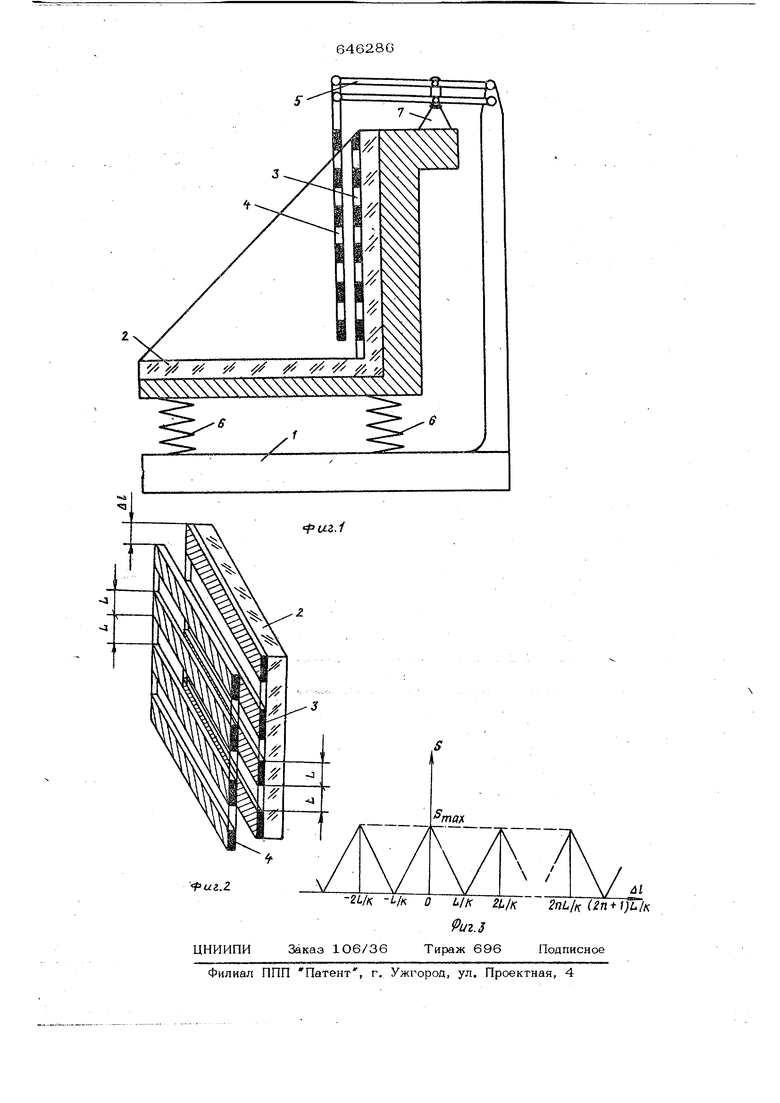
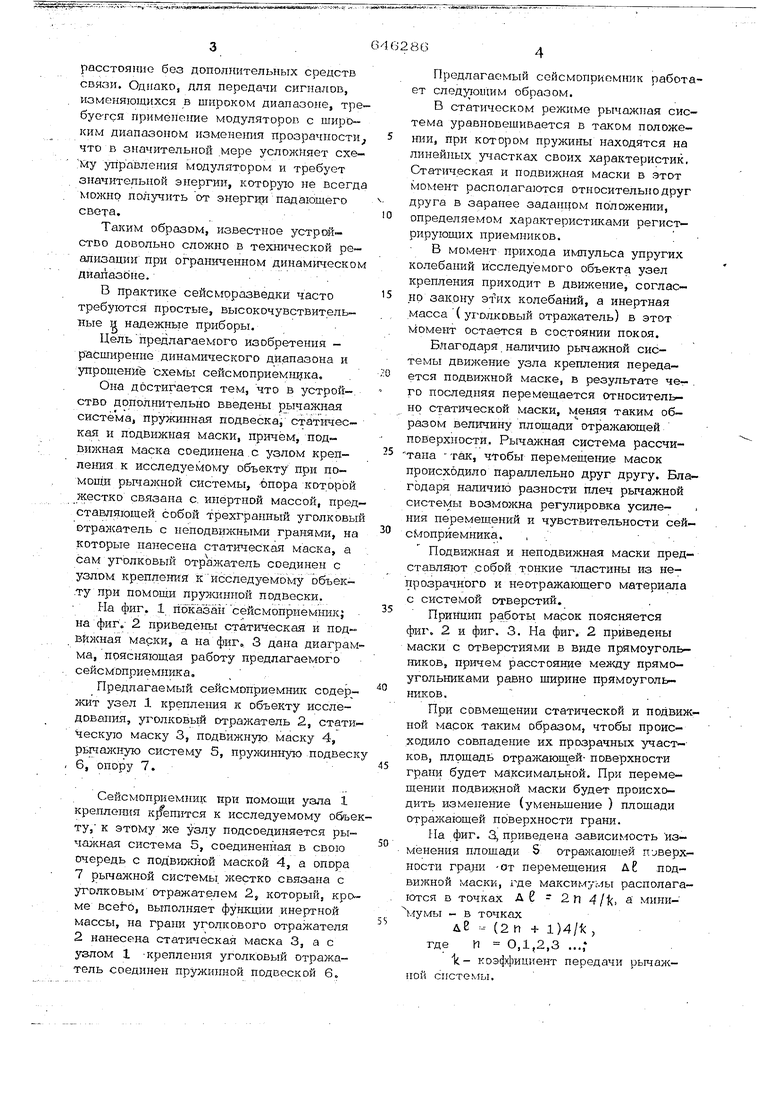
(54) СЕЙСМОПРИЕМНИК расстояние без дополнительных средств связи. Однако, для передачи сигналов, изменяющихся в широком диапазоне, тре буется применение модуляторов с широким диапазоном изменения пpoзpaчнocти что в значительной ,мере усложняет схе- .йу управления модулятором и требует значительной энергии, которую не всегд можно получить от энергии падающего света. Таким образом, известное устройство довольно сложно в технической реализации при ограниченном динам№1еском диапазоне.. В практике сейсморазведки часто требуются простые, высокочувствительные и надежные приборы. Цельпредлагаемого изобретения расширение динамического диапазона и упрощение схемы сейсмоприемн1 ка. Она достигается тем, что в устрой-, ство дополнительно введены рычажная система, пружинная подвеска, статичес кая и подвижная маски, причём, подвижная маска соединена.с узлом крепления к исследуемому объекту при помощи рычажной системы, -бпора кот.орой жестко связана с. инертной массой, пред ставляющей собой трехгранный уголковы отражатель с неподвижными гранями, на которые нанесена статическая маска, а сам уголковый отражатель соединен с узлом, крепления кисследуемому Ьбъек.ту при помощи пруяшшшй подвески. На фиг. 1 показан сейсмоприемник} на фиг.- 2 приведены статическая и подвйжная марки, а на фиг.. 3 дана диаграм ма, поясняющая работу предлагаемого сейсмоприемника. Предлагаемый сейсмоприемник содер жит узел 1 крепления к объекту исследования, уголковый отражатель 2, стати ческую маску 3, подвижную маску 4, рычажную систему 5, пружинную подвес , 6, опору 7. Сейсмоприемник при помощи узла 1 креплепия крепится к исследуемому объ ту, к этому же узлу подсоединяется ры система 5, соединенная в свою очередь с подвижтюй маской 4, а опора 7 рычажной системы, жестко связана с УГОЛКОВЫМ отражателем 2, который, кр ме Bceho, вы-полняет функции инертной массы, на грани уголкового отражателя 2 нанесена статическая маска 3, а с узлом 1 -крепления уголковый отражатель соединен пружинной подвеской 6, Предлагаемый сейсмоприемник работает следу1ощим образом. В статическом режиме рычажная система уравновешивается в таком положении, при котором пружины находятся на линейных участках своих характеристик. Статическая и подвижная маски в этот момент располага отся относительно друг друга в заранее заданном положении, определяемом характеристиками регистрирующих приемников. В момент прихода импульса упругих колебаний исследуемого объекта узел крепления приходит в движение, согласно закону этих колебаний, а инертная масса ( уголковый отршкатель) в этот момент остается в состоянии покоя. Благодаря наличию ръгаажной системы движение узла крепления передается подвижной маске, в результате че- . го последняя перемещается относительно статической маски, меняя таким образом величину площади отражающей поверхности. Рычажная система рассчитана - так, чтобы перемещение масок происходило параллельно друг другу. Благодаря наличию разности плеч рычажной системы возможна регулировка усиления перемещений и чувствительности сейсМопрйемника. , .- -. Подвижная и неподвижная маски представляют .собой тонкие пластины из непрозрачного и неотра кающего материала с системой отверстий. Принцип работы масок поясняется фиг. 2 и фиг. 3. На фиг, 2 приведены маски с отверстиями в виде прямоугольников, причем расстояние между прямоугольниками равно ширине прямоугольников. При совмещении статической и поДвижпой масок таким образом, чтобы происходило совпадение их прозрачных участ-ков, площадь отражающ ей- поверхности грани будет максимальной. При перемещении подвижной маски будет происходить изменение (уменьшение ) площади отражающей поверхности грани. Па фиг. 3, приведена зависимость изменения площади S отрал.ающей поверхности грани -от перемещения д подвижной маски, где максимумы располагаются в точках Дб - 2п 4/1, а миии iyMbi - в точках дВ - (2 п + 1)4/1 , где П 0,1,2,3 ...; k. - коэфк1}ициент передачи рычажной системы. При данном выборе формы прозрачных отверстий промежуточные значения межд максимумом и миниь1умом лежат на прямой, наклон которой определяется разме рами (шириной U ) отверстий. Меняя форму отверстий и взаимное и расположение, можно получать различны зависимости изменения площади отражающей поверхности от перемещений подви ной маски и тем самым компенсировать искажения сигнала, возникающие в системе из-за разбросов, параметров механического привода и нелинейности приемно-передающей аппаратуры. При работе с предлагаемым сейсмо- приемником его необходимо облучать пуч ком лучей моно- или полихроматического света. Информация в виде изменения интенсивности отраженного пучка лучей может быть зарегистрирована в направлении, обратном направлению падения об лучения. Таким образом, колебания исследуемого объекта по отношению к инертной массе влияют через рычажную систему на взаимное расположение масок, в результате чего полезный сигнал в виде изменения интенсивности отраженного пучка лучей, пропорциональное изменению эффективной площади отражения, передается в направлении, противоположном направлению падающего пучка лучей При изменении сигнала в. широких пределах, т.е. больших, чем ДЕ 4/|, эффективная площадь отражения не превышает S , что позволяет регистрировать такие сигналы на одном пределе, соответствующем по интенсивности О . . , S vv,ni., , а полезный сигнал определяется при этом как текущее значение интенсивности отраженного пучка лучей плюс величина интенсивности, рав ная целому числу превьш1ений над максимальной интенсивностью в каждом интервале изменения сигналов21111.... f2Ht1-)i, в результате этого входной сигнал МОOt U . жет меняться в пределах где Г1 - количество отверстгоТ в масках, при котором еще сохраняется знаN может дости гь больщих значений. Чувствительность и цинa дичecкий диапазон сейсмоприемник-j регулируется изменением соотношения плеч рычажной системы, подбором пружин, количеством, размерами и формой прозрачных отверстий масок. При соответствующем подборе указанных величин возможно достичь достаточно высокой чувствительности и широкого динамического диапазона преобразования механических перемещений в изменении интенсивности «светового потока. Форму л, а изобретения Сейсмоприемник, содержащий отражу. тель с неподвижными отражакшшми гранями и узел крепления к исследуемому объекту, отличающийся тем, что, с целые упрощения схемы и расширения динамического диапазона, он дополнительно содержит рьгчажную систему, пружинную подвеску, статическую и подвижную маски, причем, подвижная маска соединена с узлом крепления к исследуемому объекту рычажной системой, опора рычажной системы жестко связана с уголковым отражателем с неподвижнъ1Ми отражающими гранями, на которые нанесена статическая маска, а сам уголковый отражатель соединен с узлом крепления к исследуемому объекту при помощи пружинной подвески. , Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 397754, кл. 6 01 d 5/32, 1973. 2.Авторское свидетельство СССР №542225, кл. Q 08 С 23/ОО, 1976.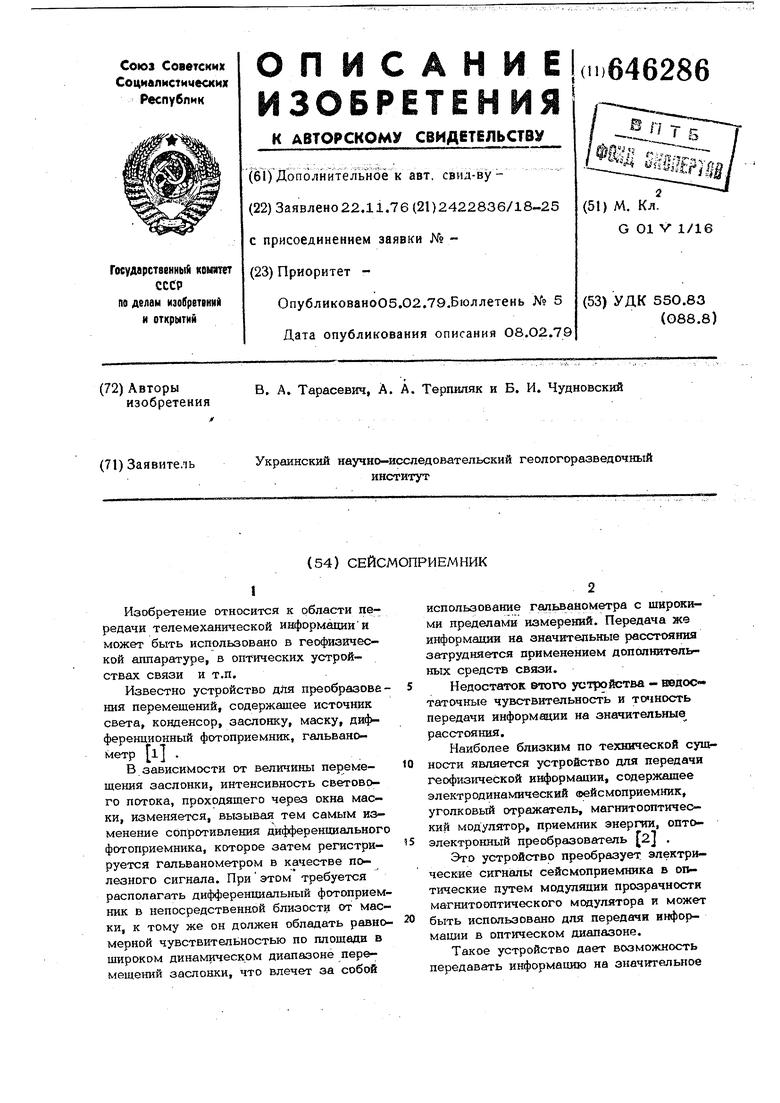
| название | год | авторы | номер документа |
|---|---|---|---|
| Боеприпас-кассета для управляемого внезапного создания маски-помехи в зоне расположения маскируемого объекта | 2018 |
|
RU2702538C1 |
| СПОСОБ ПОСТАНОВКИ МАСОК-ПОМЕХ, ВАРИАНТЫ ПНЕВМАТИЧЕСКИХ ОТРАЖАТЕЛЕЙ И БОЕПРИПАСОВ-КАССЕТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2247302C2 |
| ИСКУССТВЕННАЯ МАСКА-ЭКРАН (ВАРИАНТЫ) | 2003 |
|
RU2257528C2 |
| СПОСОБ ИНТЕРФЕРЕНЦИОННОЙ МИКРОСКОПИИ | 2013 |
|
RU2536764C1 |
| Индивидуальный комплект многоспектральных технических средств маскировки подвижных военных объектов с адаптивной системой управления физическими параметрами | 2022 |
|
RU2791934C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТА С ПОМОЩЬЮ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ И УГОЛКОВОГО ОТРАЖАТЕЛЯ | 2014 |
|
RU2556282C1 |
| Интерферометр для измерения линейных величин | 1988 |
|
SU1567870A1 |
| РЕТРОРЕФЛЕКТОРНАЯ СИСТЕМА ИЗ КОНИЧЕСКИХ ОТРАЖАТЕЛЕЙ | 2024 |
|
RU2830840C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| Имитатор демаскирующих признаков движущейся военной техники для внезапного изменения целевой обстановки в целях противодействия ВТО | 2022 |
|
RU2799747C1 |