I
Изобретение относится к области систем автоматического управления, а именно, к позиционным следящим системам цифрового типа, применяемым, например, в станках с программным утГравлением, устройствах развертки знаков фотонаборных машин, комплексных системах авиационной автоматики.
Широко известны позиционные следящие системЬ с цифровым заданием сигнала на входе и цифровым- преобразова- нием сигнала в цепи обратной связи, с применением устройств функционального преобразования напряжения во временной кодированный интервал 1 и 2.
Недостатками указанных систем являются сравнительно низкое быстродействие, а также динамические ошибки, возникающие в результате цифрового преобразования скорости ведомого вала.
Наиболее близкой к описываемому изобретению является система автоматического управления приводом с оптимальным режимом движения исполнительного
механизма и,плавного изменения начала торможения при изменении коэффициента статизма, содержащее блоки текущей и заданной информации, попарно подключенные ко входам тетрад сравнения, блок управления приводом, последовательно соединенные контрольный .блок и узел регулировки и блокировки, и выходы объединенных групп старших и младших тетрад сравнения, подключенных к соответствующим входамконтрольного блока, а выход узла блокировки подсоединен к блоку управления приводом .
Недостатком этой системы является то, что момент начала торможения фиксирован относительно рассогласования и определяется числом, соответствуюmViM коду младших тетрад плюс значение самого младшего разряда. Это приводит к отклонению от оптимального по быстродействию управ/тения при вариации в широких пределах зааатшой информапип и не обеспечивает минимальное
а чение времени регулирования и монотонность переходного tipoaecca.
Целью изобретения является поШшение быстроД(ействия цифровой позиционной следящей системы с фотоэлектрическим преобразователем накапливающего типа в иепи обратной связи путем формирования релейного закона управления с автоматическим определением момента переключения исполнительного двигателя с режима разгона на режим торможения противовключением.
Поставленная цель достигается тем, что система содержит элемент И, ц0литель напряжения, два блока коммутации преобразователь напряжение - время, причем выход преобразователя код-напряжение через элемент И соединен с делителем напряжения, выходы которого через первый блок коммутации соединены с преобразователем напряжение время, связанным -со вторым блоком коммутации, причем первый блок коммутации связан с блоком управления.
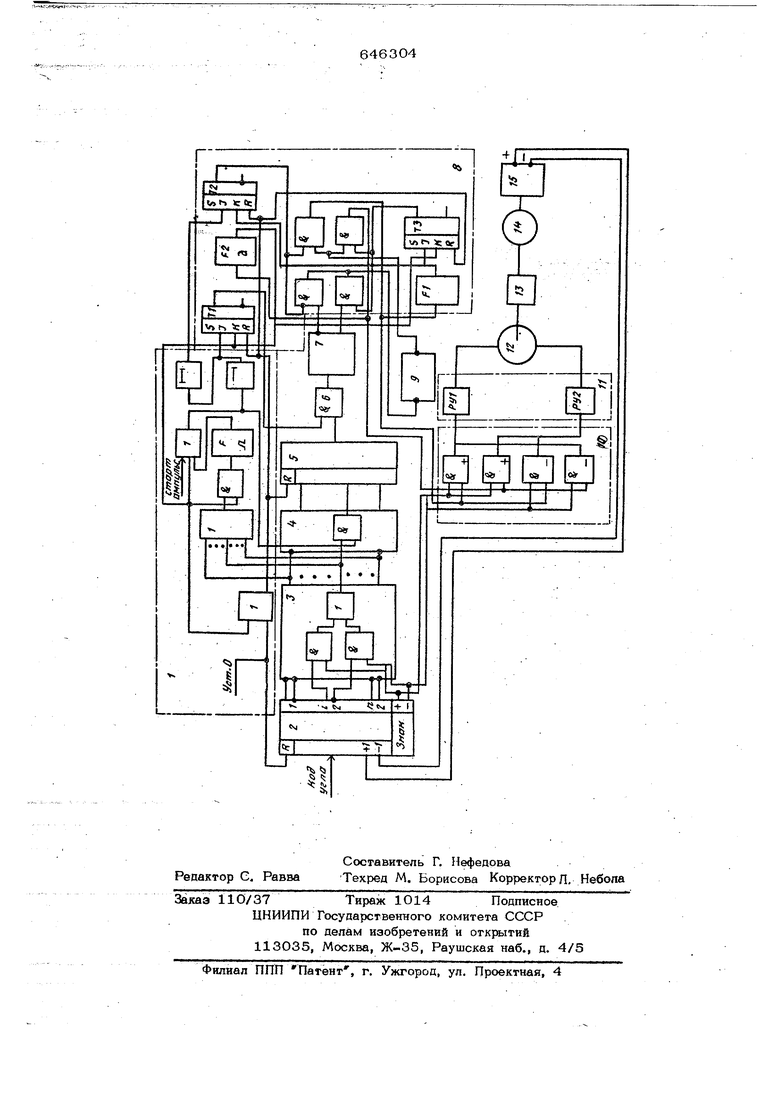
На чертеже представлена блок-схема системы, содержащая блок.управления 1, реверсивный счетчик 2, блок йнализа знака кода 3, блок записи кода в ПКН 4, Преобразователь код-напр51жение (ПКН)5, схему И 6, блок функцио напьного деления напряжения 7, первый блок коммутации 8, преобразователь напряжение-время 9, второй блок коммутациц 10, двухканальный релейный усилитель 11, электродвигатель 12, редуктор 13, фотоэлектрический датчик 14, блок формирования импульсов направления вращения 15,
Система работает сле/хующим образом. Из внешнего командного устройства поступают сигналы установки нуля Уст.О , кода угла и старт импульс, По сигналу Уст. О реверсивный счетчик 2, ПКН 5, а также триггеры Т1, Т2. н ТЗ первого блока коммутации 8 устанавливаются в исходное (нулевое) положение, после чего в реверсивный счетчик 2 записывается код угла с признаком знака. По сигналу старт-им .пульс отк й 1ваются на период длительности этого импульса элементы И блока запаси кода 4, и код из-реверсивного счётчика 2 через блок анализа знака 3 зацисывается в ПКН. На выходе ПКН 5 образуется напряжение, величина которого пропорциональна коду угла. Это напряжение поступает через схему И на вход блока функционального делитеЛЯ напряжения 7. Причем схема И пропускает нанря | ение в течение одного полного цикла запуска и торможения двигателя. Это обеспечивается триггером Т1, который открывает схему И по сигналу старт-импульс через некоторое время (необходимое для преобразования кода в напряжение в сХеме ПКН), На выходе блока 7 образуются напряжения двух значений: одно пропорционально длительности разгона двигателя, второе - длительности торможения про- тивовключением. Сначала с помощью блока 9 преобразуется напряжение, nponoj цнональное длительности разгона двигателя, затем напряжение пропорциональное длительности торможения. Такая последовательность преобразования осуществляется первым блоком коммутации 8 следующим образом. Триггер Т2 по сигналу старт-импульс открывает верхние схемы И в первом блоке коммутации 8, и напряжение, пропорциональное
Длительносги разгона, поступает на блок 9, который формирует прямоугольный импульс, пропорциональный длительности разгона двигателя. По заднему фронту этого импульса с помощью формирующего элемента Ti образуется сигнал, который переводит триггер Т2 в нулевое положение, а триггер ТЗ в единичное положение. Этим самым верхние элементы И закрываются, а нижние открываются, и напряжение, пропорциональное длительности торможения, поступает на блок 9, По заднему фронту импульса торможения с помощью формирователя сигнала р триггеры Т1 и ТЗ устанавливаются в исходное, (нулевое) положенне. При этом схема И на входе блока 7 разрывает цепь.связи преобразователя код-напряжение 5 и блока 7.-. Сформированньш на, выходе преобразователя напряжение - время прямоуголь-. ные импульсы для разгона и торможения двигателя поступают через второй блок
коммутац ии„10 в зависимости от знака угла насоответствующий канал двухканального релейного усилителя 11, Коммутация каналов усилителя 11 осуществляется вторым блоком коммутации 10. Если знак угла - плюс, то открываются две верхние схемы И блока Ю, если минус - две нижние схемы И. Допустим знак угла плюс . Тогда импульс разгона двигателя через, верхнюю схему И блока 10 поступает на верхний канал релейного усилителя РУ1, а импульс торможения через вторую верхнюю схему И блока 10 на релейный усилитель РУ2. Выходное напряжение РУ1 обеспечнвает вращение двигателя в прямом направлении, а напряжение усилителя РУ2 - в обратном направлении. Если знак угла минус, то открываются две нижние схемы И блока 10, и импульс разгона двигателя поступает на РУ2, р импульс торможения на РУ1, При наличии на выходе усилителя 11 йапряжения, двигатель 12 поворачивает вал нагрузки и вал фотоэлектрического датчика 14 на определенный угол, соответствующий времени действия этого напряжения. На ныходе блока 15 образуются импульсы, число которых пропорционально величине угла поворота вала, KOTOpbie, поступая на реверсивный счетчик, вь1 «Читаются из числа, записанного вначале преобразования кода. В резуль)тате поггаого никла преобразования на выходе реверсивного счетадка, а сле довательно, и блока анализа знака 5 будет число нуль. В этом случае схема И в блоке 1 будет закрыта и сигнал сформированный Ря з первом блоке коммутации 8 об окончании цикла работы, не пройдет на элемент бл;рка 1, формирующий импульс повторного запуска всей схемы. В пробивном случае при любом другом числе, записанном в реверсивном счетчике, отличном от нуля, сигнал с Г пройдет через схему И блока 1 к цикл работы всей схемы повторится. Система обладает высоким бьютродействием за счет формирования оптимального по времени переходного процесса закона управления. Обработка системой заданного угла происходит за один цикл, что достигается путем оптимального выбора соотношений длительностей импульсов разгона и торможения. Система имеет высокое быстродействие и достаточно простую и надежную схему. Формула изобретения Цифровая следящая система, содержащая последовательно соединенные реверсивный счетчик, блок анализа знака кода, преобразователь код-напряЖение, блок управления, аыходы которого связаны с реверсивным счетчиком, последовательно соединенные двухканальный релейный усилитель, двигатель и редук- тор, на валу которого установлен фотоэлектрический датчик, соединенный с блоком формирования импульсов, связанным со входом реверсивного счетчика, отличающаяся тем, что, с целью повыщения быстродействия системы, она содержит элемент И, делитель напряжения, два блока коммутация, преобразователь напряжение - время, причем й)1ход преобразователя ког -напряжение через элемент И соединен с делителем напряжения, вь1ходы которого через первьШ блок коммутации соединены с преобразователем напряжение-время, связанным со вторым блоком коммутации, а первый блок коммутации связан с блеском управления. Источники информаш1и принятые во внимание при экспертизе 1.Преснухин Л. Н. Фотоэлектрические преобразователи информации. М., Мащиостроение, 1974. 2.Гельман Н. Н. Преобразователи напряжения в кодированный временной нтервал, 1970. 3.Авторское свидетельство СССР NO 205915, :кл.С 05 В 7/ОО, 21.11.66,
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропривод переменного тока | 1970 |
|
SU505112A1 |
| Устройство для управления приводом одноковшового экскаватора | 1972 |
|
SU442271A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Устройство для считывания графических функций | 1972 |
|
SU437112A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2115150C1 |
| АНАЛОГО-ДИСКРЕТНАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 1966 |
|
SU216082A1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
| Атомно-абсорбционный спектрофотометр | 1990 |
|
SU1746228A1 |