1
Изобретение относится к области автоматического управления производственными механизмами и может быть использовано для автоматизации позиционного перемещения приводов одноковшового экскаватора по системе Г-Д, например, поворота, обладающих значительными моментами , изменяющимися в процессе работы в определенных пределах.
Известно устройство управления приводом одноковшового экскаватора, включающее импульсный датчик величины и направления перемещения.
Целью изобретения является повышение точности и быстродействия работы устройства.
Поставленная цель достигается тем, что к соответствующим выходам датчика величины и направления перемещения подключены цифроаналоговый датчик скорости и блок програ-) м;дпого управления, выходы каждого из которых соединены с подключенным к возбудителю генератора блоком формирования закона управления, к которому также подсоединены выходы датчиков тока и его первой производной по времени, включенных в якорную цепь привода, и выход датчика второй производной, соединенного с датчиком первой производной, причем блок программного управления выполнен с преобразователем код-напряжение, к коммутируемым входам которого соответствующими младшими разрядами подключены реверсивные счетчики, каждый старший разряд которых через разделительные диоды подключен ко всем разрядам преобразователя код-напряжение.
Изобретение поясняется чертежом,
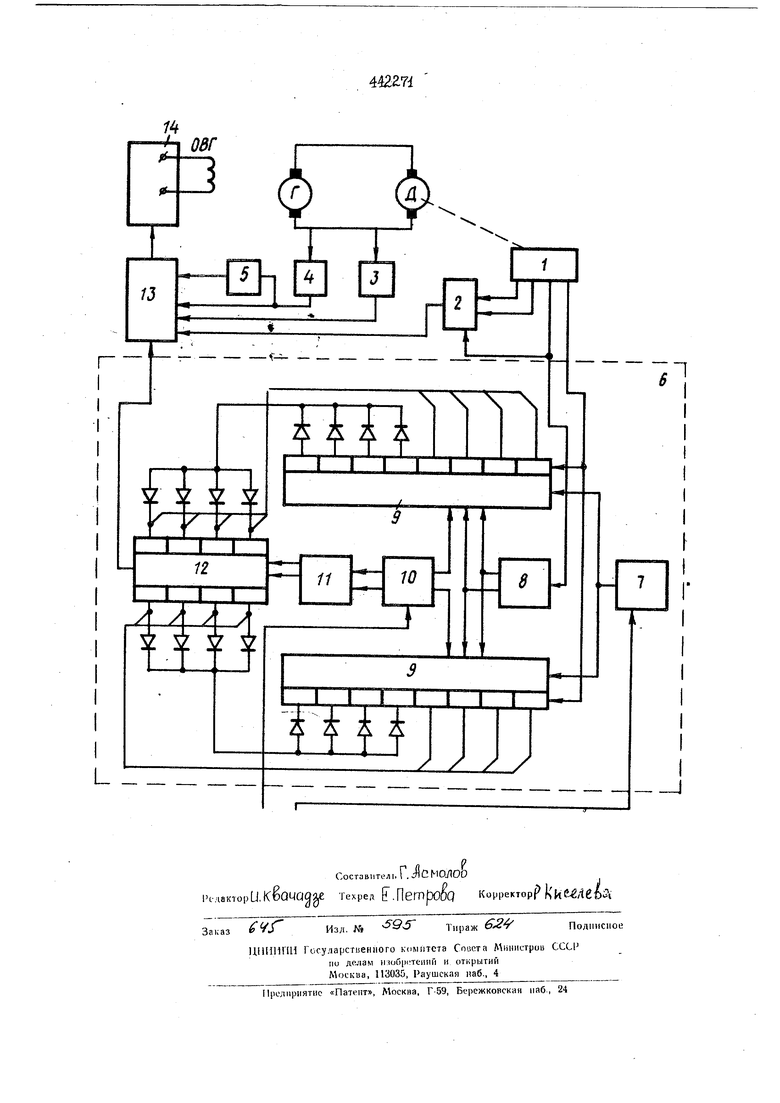
5стройстБо управления приводом одноковшового экскаватора содержит импульсный датчик I величины и направления перемещения, цифроаналоговый датчик 2 скорости, датчик 3 тока, датчик первой производной I тока по времени и датчик 5 второй производной тока по времени, олок 6 программного управлёш.н, состоянии из узла 7 гфограшлного смещения, триггера ;, двух реверсивных счетчиков 9, узла задания неправления перемещения 10, триггера II и преобразователя код-напряжение 12, блок 13 формировании закона управления, управляющий возбудителем 14 генератора, Импульсный датчик I величины и направления перемещения при вращении поворотной платформы экскаватора выдает импульсы, пропорциональ ные перемещению, импульсы скорости с частотой, пропорциональной скорости перемещения, и знак скорости. Импульсы скорости поступают в цифро аналоговый датчик 2 скорости. Количество импульсов перенещеНИН за один оборот датчика выбирается в зависимости от необходимой точности перемещения. Счетные входы двух идентичных реверсивных счвтчиков 9 подключены к выходу датчика 1 Разрядность счетчиков 9 выбирается исходя из возможности записи максимального значения перемещения Преобразователь код-напряжение , ---„ , (ПКН) 12, имеющий два коммутируемых входа, подключаются то к одному, то к другому счетчику 9 в момент списы ванкя с них информации. Причем младшие разряды счетчиков непосредственно подключаются к соответствующим разрядам ПКН, а старшие ко всем разрядам соответствующего входа ПКН через разделительные диоды, Подключение ПКН к соответствующему счетчику 9 производит триггер II, входы которого подсоединены к узлу 10 задания направления перемещении. Коммутируемый датчиком I, триггер 8 в зависимости от знака скорости производит синхронную коммутацию счетчиков 9 на запись или списывание. Работа программного устройства происходит следующим образом. Первоначальный ввод задания осуществляется оператором при помощи перемещения поворотной платформы экскаватора на необходимый угол при ручном управлении и подачи в один из реверсивных счетчиков 9 через узел 7 сигнала программного смещения. При задании программы оператором путем перемещения платформы на необходимый угол импульсный датчик записывает в программное устройство соответствующее число. В зависимости от направления перемещения один из счетчиков работает в режиме сложения (запись) а другой - вычитания (списывание). Подключение шин запись и списывание производится при ломощи триггера 8, состояние которого определяется датчиком I в зайисимости от направления перемещения. В счетчике 9, к которому подключена шина запись, происходит счет и запоминание количества импульсов, поступающих от датчика I величины и направления перемещения, и алгебраическое суммирование их с сигналом программного смещения, на этом процесс ввода программы заканчивается. По команде оператора на перемещение в автоматическом режиме в заданную сторону узел 10 задания направления перемещения производит установку соответствующего счетчика 9 в исходное состояние и подключает ПКН к другому счетчику, с которого списывается информация. При перемещении экскаватора импульсы с датчика I производят списывание информации со счетчи1са, подключенного к ПКН, и записываются в другой счетчик. Таким образом uupciQup.. подобная схема работы счетчиков 9 обеспечивает сохранность информации о заданной программе и определение текущего значения ошибки перемещения поворотной платформы экскаватора во всем диапазоне движения системы. При автоматическом воспроизведении заданного перемещения алгоритм управления реализуется в блоке 13 формирования закона управления, на вход которого поступают с рассчитанными коэффициентами веса сигналы от датчиков 2 скорости, 3 тока, 4 и 5 первой и второй производных тока по времени и сигнал, пропорциональнш ошибке перомеишния из блока б программного управления. Алгоритм управленг.я формируется путем алгебраического суммиро вания поступающих сигналов и преобразования суммарного сигнала на усилителе, осиленный сигнал подается на вход 14 возбудителя генератора, обеспечивая воспроизведение заданного перемещения. ПРЕДМЕТ ИЗОБРЕТЕНИЯ I, Устройство управления приьодом одноковшового экскаватора, например, поворота по системе генератор-двигатель с возбудителем генератора, включающее импульсный датчик величины и лаправлония перемещения, отличающееся тем, что, с целью повышения точности и быстродействия работы устройства, к соответствующим выходам датчика величины и направления перемещения подключены пифроаналоговыи датчик скорости и блок программного управления, выходы каждого из которых соединены с подключенным к возбудителю генератора блоком формирования закона управления, к которому также подсоединены выходы датчиков тока и его первой производной по времени, включенных в якорную цепь привода, и выход датчика второй производной, соединенного с датчиком первой производной.
2. Устройство по П.1, отличающееся тем, что блок программного . управления выполнен с преобразователем код-напряжение, к коммуб тируемым входам которого соответствующими младшими разрядами подключены реверсивные счетчики, каждый старший разряд которых через разделительные диоды подключен к разрядам преобразователя код-напряжение.
1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления приводом одноковшевого экскаватора | 1974 |
|
SU600263A2 |
| Устройствоуправления приводом поворота одноковшового экскаватора | 1975 |
|
SU590409A2 |
| Устройство для регулирования соотношения параметров | 1972 |
|
SU458811A1 |
| Система программного управления электроприводом | 1987 |
|
SU1481708A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство для управления гидравлическим экскаватором | 1989 |
|
SU1778249A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ МЕХАНИЗМОВ МАШИН | 1968 |
|
SU218392A1 |
| Дискретно-цифровой электропривод | 1985 |
|
SU1350800A1 |
| Цифровой измеритель относительной разности скоростей | 1981 |
|
SU1015306A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |