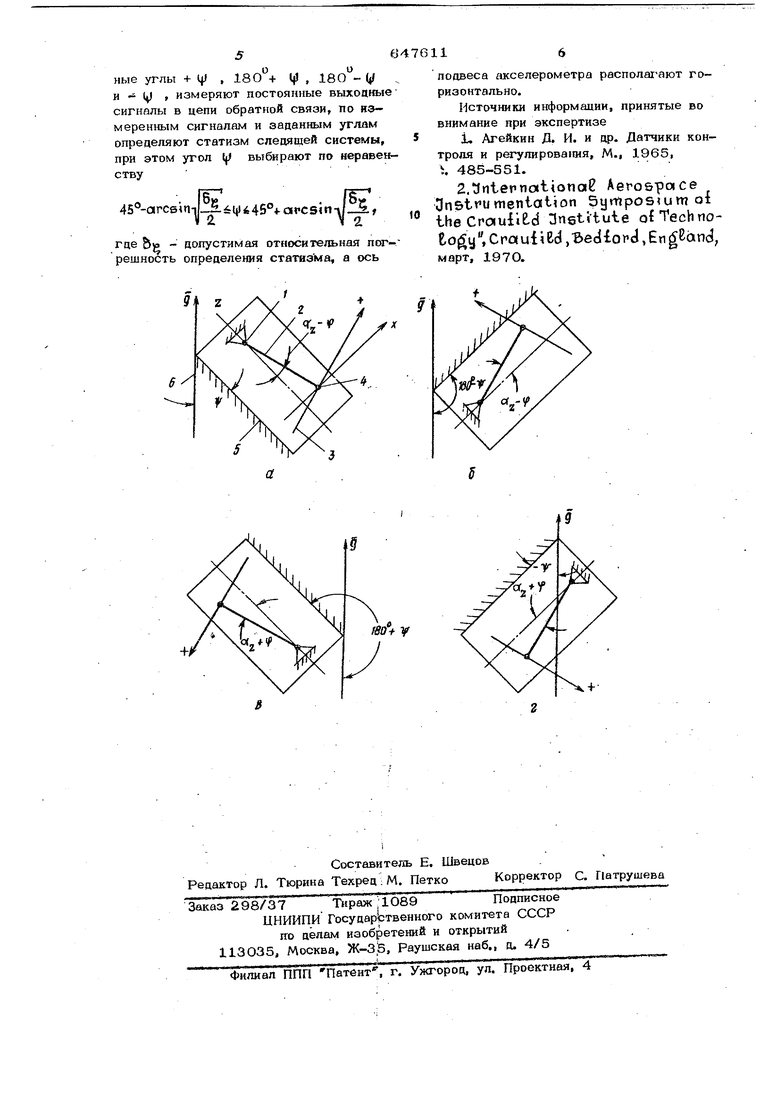
элемента и базовой ппосксюти относи тельно вектора ускорения силы тяжести. Ось 1 поцвеса чувствительного элемента 2 перпендикулярна к осям X и. U акселерометра и. лежит в горизонтальной плсхзкости. Измерительная ось 3 пёрпенцикулярна к плоскости, проходящей через ось подвеса и центр 4 инерции чувствительного элемента. Базовая плоскость 5 с вектором 6 ускорения силы тяжести образует угол Ц1 (см. черт., поз. а), угол (ISO tj) ) - в положении; показанном на чертеже поз. б, угол (18О +( ) - в положений, показанном на чертеже поз. в, угол минус ф - в положении, показанном на чертеже поз.Г
Выходные сигналы акселерометра в цени, обратной связи описываются еле- дующими выражениями: в положении, приведенном на чертеже (поз. а), выходной сигнал XT акселерометра раW
вен
is .jial-Ktoio- g 5Ш ()-ь
Hi
(ц) (oC2,-if).21
.г
(у.,. U
-t-P,
3 й-in .2
где К - крутизна статической градуировочной характеристики акселерометра;
GQ- составляющая сигнала акселерометра, не зависящая от ускорения;
o6v погрешность базы (неперпендикулярность измерительной оси к базовой плоскости по оси 2( );
tp - статическое перемещение чувствительного элемента, вызванное наличием ускорения по измерительной оси; Рл , R,-коэффициенты квадратичной и кубической нелинейности соответственно
В положении, показанном на чертеже поз. б, выходнойсигнал акселерометра авен
iso-Ц)) I У-ог; n(V-d.2i)
«.P.,,Ф) . (21
3g, Т &
в положении, показанном на чертеже поз. в, выходной сигнал и .Q Q ,., равен
iSOOt ц И °о - g Sirj (1 - ОС 2 -Ч) -i;P2.sin2(lytOi2i-bCp)-.
.(). (S)
В НОЛоже{ши,показанном на чертеже поз. г выходной сигнал равен
-м toil to о - g S i Ц- 0 и - )+
(Ц-оСа-ф)-Рзё 5 1 -Ла-ф). W Статизм следящей системы акселерометра равен
.
Ч -Г-.(5)
)
Определяя из выражений (1) и (4) угол Ц с учетом его малости и принимая со9оЬ2:.1,после подстановки в выражение (5), получаем для статизма
Vi900-v c,).lI.(o,b-U(a)--U,
,-- Ь
4к б1пц)СОбу
Точность определения статизма зависит от угла tjl
Если допустимая относительная погрешность о у
в определении статизма
равна
AW
а
Оу -г
где Д11 - абсолютная величина погрешности определения J , то угол ф ба-. зовой плоскости с вектором ускорения силы тяжести должен быть установлен в пределах
Гй Гк-
45 -агсБШл- iWiAS +arcsmn -ii-(3)
N 242
Определение статизма производится по большим постоянным выходным сигналам акселерометра в цепи обратной связи и при этом на выход акселерометра не проходят нулевой нефазный сигнал с датчика перемещения и сигнал помехи, которые устраняются фазовым демодулятором усилителя следящей системы акселерометра.
Формула изобретения
Способ определе шя статизма следящей системы акселерометра с обратной Связью путем измерения перемещения чувствительного элемента от ускорения по измерительной оси, о т л и ч а ю- щ и и с я тем, что, с целью повыще.ния точности, акселерометр последовательно разворачивают относительно вектора ускорения силы тяжести на з.адан180 + ф , 18 у
ные углы + Ц) и - 1) , измеряют постоянные выходные сигналы в цепи обратной связи, по измеренным сигналам и заданным углам определяют статизм следящей системы, при этом угол выбирают по неравенству
. (бГfir
45°-arcsin-J i6{,t445°4 oifCsinn 1, 2ч 2
где & - допустимая относительная погрешность определения статизма, а ось
подвеса акселерометра распола1 ают горизонтально.
Источники информации, принятые во внимание при экспертизе
1, Агейкин Д. И. и др. Датчики контроля и регулироватя, М., 1965, 485-551.
2,ttniepnational Aerospace Dn&tvumentation Sympos umoi the CrauilS-d nnetHuie of Tech notogy,Crau{ied,Be(iioicl,EngBdnd,
март, 197O.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации нелинейности акселерометра | 1975 |
|
SU690395A1 |
| ИНКЛИНОМЕТР | 2003 |
|
RU2247942C1 |
| Способ градуировки вертикальных акселерометров | 1989 |
|
SU1742734A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРЕЦИЗИОННОГО КВАРЦЕВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 2013 |
|
RU2533752C1 |
| Способ определения параметров маятникового компенсационного акселерометра | 1979 |
|
SU866482A1 |
| Способ определения параметров акселерометра | 1990 |
|
SU1812505A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| ИЗМЕРИТЕЛЬ УГЛОВОГО ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 2011 |
|
RU2491507C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| Способ исследования виброустойчивости маятникового акселерометра и устройство для его осуществления | 1987 |
|
SU1559295A1 |
m tf
