(54) УСТРОЙСТВО ДЛЯ ВЫДЕЛЕЙИЯ ОДИНОЧНОГО СИГНАЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля движения транспортного средства при переходе с одного пути на другой | 1972 |
|
SU500129A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ИНФОРМАЦИОННО- ЛОГИЧЕСКОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО УЧЕТА ОБЪЕМОВ И КОЛИЧЕСТВА ЛЕСОМАТЕРИАЛОВ | 1971 |
|
SU301525A1 |
| Система телемеханики для циклического опроса рассредоточенных объектов | 1977 |
|
SU691912A1 |
| Устройство для адресования грузов установок непрерывного транспорта | 1978 |
|
SU716934A1 |
| Реверсивный распределитель импульсов | 1976 |
|
SU656209A1 |
| Устройство для программного управления технологическим оборудованием | 1986 |
|
SU1372277A1 |
| ЦИФРОВОЕ ПРОГНОЗИРУЮЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2446454C1 |
| Система телемеханики | 1983 |
|
SU1149296A1 |
| Устройство для выделения одиночного сигнала | 1972 |
|
SU463599A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2013 |
|
RU2534955C1 |
. ;..;. .1 .
. Изобретение относится к системам автоматического управления установками неярерывного транспорта (конвейерами) .
в основном изобретении по авт.св 463599 описано устройство для выделения одиночного сигнала датчика положения подвижного объекта, состоящее из элементов и Д вухкан аильного генератора импульсбй, сдвинутых во времени один относительно другого, причем входной сигнал подан на считывающий вход первого элемента памяти, с подготавливающим входом которого соединен первый выход генератора импульсов, а выход первого элемента памяти соединён со считывающим входом второго элемента памйти, с подготавливакадюл входом которого соединен второй выход генератора импульсов fl
Недостатком известного устройства является то, что оно не может обеспечить гарантированное выделени одиночного сигнала датчика в случае остановки тягового органа конвейера во время нахождения подвижного объета S зоне датчика, например, тогда, когда подвижной объект, вызвав сра.батывание устройства вьщелейия одиночного сигнала, после остановки тягового органа конвейера перестал перемещаться и остался 6 зоНё взаимодействия с датчиком. Если время остановки будет большим, чем время между двумй сигналами генератора импульсов, то будут вновь подготовлены оба элемента памяти и возщбжно повторное срабатывание устройства.
Цель изобретения - повышение надежности работы устройства.
Это достигается тем, что предлага; емое устройство снабжено датчиком
S наличия перемещения объекта, блокс л динамической памяти и схема «1 запрет, причем выходел двухканалйного генератора импульсов соединены с подготавливакнцйми входами элементов памяти через схемы запрет , запрещающие входы которых соединены с выхсэдом блока динамической памяти, входы которого соединены с датчиком наличия перемещения
5 объекта и выходами двухканального генератора импульсов. .
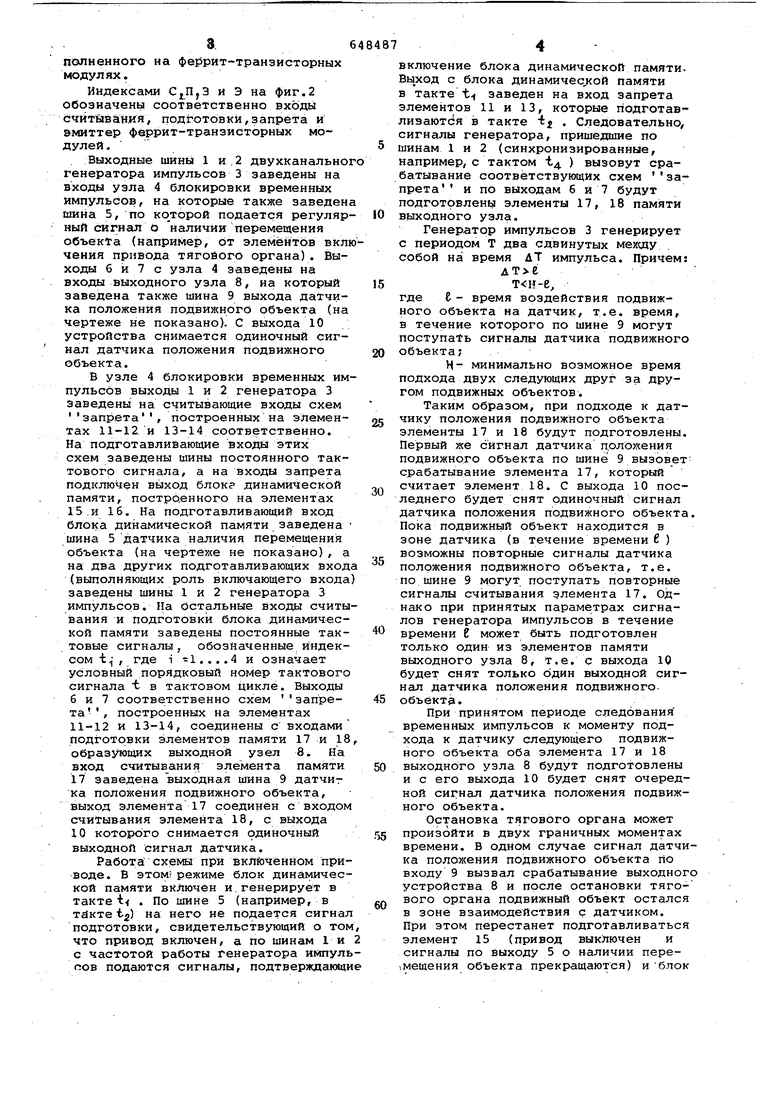
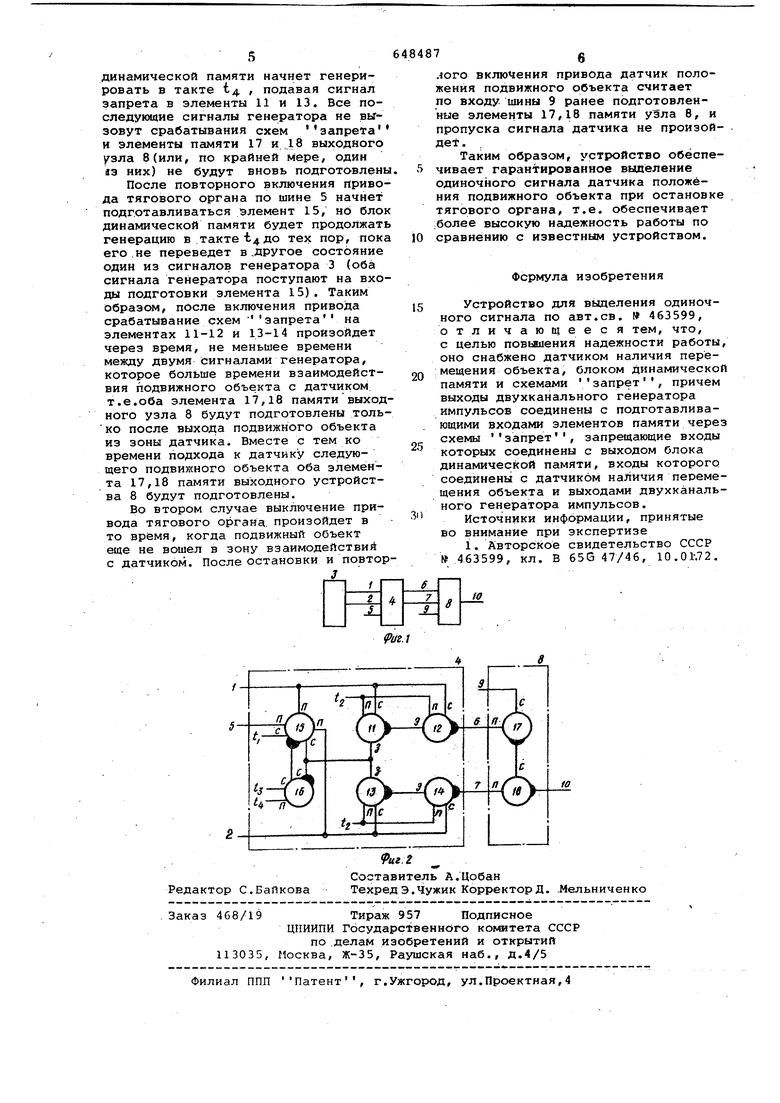
На фиг.1 изображена блок-схема описываемого устройства; на фиг.2 функциональная схема устройства для
0 выделения одиночного сигнала, вы8. попненного на т-транзисторных модулях. Индексами ,3 и Э на фиг.2 обозначены соответственно входы считывания, подготовки,запрета и эмиттер феррит-транзисторных модулей. . Выходные шиньа 1 и.2 двухканально генератора импульсов 3 заведены на входы узла 4 блокировки временных импульсов, на которые также заведен шина 5, по конторой подается регуляр ный сигнал о наличии перемещения объекта (например, от элементов вкл чения привода тягойого органа). Выходы б и 7 с узла 4 заведены на входы выходного узла 8, на который заведена также шина 9 выхода датчика положения подвижного объекта (на чертеже не показано). С выхода 10 устройства снимается одиночный сигнал датчика положения подвижного объекта. В узле 4 блокировки временных им пульсов выходы 1 и 2 генератора 3 заведены на считывающие входы схем запрета, построенных на элементах 11-12. и 13-14 соответственно. На подготавливающие входы этих схем заведены шины постоянного тактового сигнала, а на входы запрета подключен выход блок динамической памяти, построенного на элементах 15.и 16. На подготавливающий вход блока динамической памяти заведена шина 5 датчика наличия перемещения объекта (на чертех е не показано) , а на два других подготавливающих вход (выполняющих роль включающего входа заведены шины 1 и 2 генератора 3 импульсов. На остальные входы считы вания и подготовки блока динамической памяти заведены постоянные тактовые сигналы, обозначенные индексом t,- , где 1 1....4 и означает условный порядковый номер тактового сигнала t в тактовом цикле. Выходы б и 7 соответственно схем запрета, построенных на элементах 11-12 и 13-14, соединены с входами подготовки элементов памяти 17 и 18 образующих выходной узел 8. На вход считывания элемента памяти 17 заведена выходная шина 9 датчиг ка положения подвижного объекта, выход элемента 17 соединён с входом считывания элемента 1В, с выхода 10 KOTopdro снимается одиночный выходной сигнал датчика. Работа схемы при включенном при воде. В этом режиме блок динамичес кой памяти включен и.генерирует в такте . По шине 5 (например, в такте t) на него не подается сигна подготовки, свидетельствующий о то что привод включен, а по шинам 1 и с частотой работы генератора импул оов подаются сигналы, подтверждакиц включение блока динамической памяти. с блока динамичес,кой памяти в такте t заведен на вход запрета элементов 11 и 13, которые подготавливаются в такте ij . Следовательно, сигналы генератора, пришедшие по шинам 1 и 2 (синхронизированные, например, с тактом ± ) вызовут срабатывание соответствующих схем запрета и по выходам б и 7 будут подготовлены элементы 17, 18 памяти выходного узла. Генератор импульсов 3 генерирует с периодом Т два сдвинутых мехсду собой на время ДТ импульса. Причем; д . , где t- время воздействия подвижного объекта на датчик, т.е. время, в течение которого по шине 9 могут поступать сигналы датчика подвижного объекта; Н- минимально возможное время подхода двух следующих друг за другом подвижных объектов. Таким образом, при подходе к датчику положения подвижного объекта элементы 17 и 18 будут подготовлены. Первый же сигнал датчика п.оложения подвижного объекта по шине 9 вызовет срабатывание элемента 17, который считает элемент 18. С выхода 10 последнего будет снят одиночный сигнал датчика положения подвижного объекта. Пока подвижный объект находится в зоне датчика (в течение времени С ) возможны повторные сигналы датчика положения подвижного объекта, т.е. по шине 9 могут поступать повторные сигналы считывания элемента 17. Однако при принятых параметрах сигналов генератора импульсов в течение времени 6 может быть подготовлен только один из элементов памяти выходного узла 8, т.е. с выхода 10 будет снят только один выходной сигнал датчика положения подвижного. объекта. При принятом периоде следования временных импульсов к моменту подхода к датчику следующего подвижного объекта оба элемента 17 и 18 выходного узла 8 будут подготовлены и с его выхода 10 будет снят очередной сигнал датчика положения подвижного объекта. Остановка тягового органа может произойти в двух граничных моментах времени. В одном случае сигнал датчика полохсения подвижного объекта rio входу 9 вызвал срабатывание выходного устройства 8 и после остановки тягового органа подвижный объект остался в зоне взаимодействия с датчиком. При этом перестанет подготавливаться элемент 15 (привод выключен и сигналы по выходу 5 о наличии пере(Мещения объекта прекращаются) и блок 5 динамической памяти начнет генерировать в такте t. , подавая сигнал запрета в элементы 11 и 13. Все последующие сигналы генератора не внзовут срабатывания схем запрета и элементы памяти 17 и 18 выходного /зла 8(или, по крайней мере, один 43 них) не будут вновь подготовлен После повторного включения приво да тягового органа по шине 5 начнет подготавливаться элемент 15, но бло динамической памяти будет продолжат генерацию в такте 14 до тех пор, пок его.не переведет в .другое состояние один из сигналов генератора 3 (оба сигнала генератора поступают на вхо ды подготовки элемента 15). Таким Образом, после включения привода срабатывание схем запрета на элементах 11-12 и 13-14 произойдет через время, не меньшее времени между двумя сигналами генератора, которое больше времени взаимодействия подвижного объекта с датчиком, т.е.оба элемента 17,18 памятивыход ного узла 8 будут подготовлены только после выхода подвижного объекта из зоны датчика. Вместе с тем ко времени подхода к датчику следующего подвижного объекта оба элемента 17,18 памяти выходного устройства 8 будут подготовлены. Во втором случае выключение привода тягового органа, произойдет в то время, когда подвижный объект еще не вошел в зону взаимодействий с датчиком. После остановки и повтор 7 .1ОГО включения привода датчик положения подвижного объекта считает по входу шины 9 ранее подготовленные элементы 17,18 памяти 8, и пропуска сигнала датчика не произойдет. Таким образом, устройство обеспечивает гарантированное выделение одиночного сигнала датчика положения подвижного объекта при остановке тягового органа, т.е. обеспечивает :более высокую надежность работы по сравнению с известным устройством. Формула изобретения Устройство для выделения одиночного сигнала по авт.св. 463599, отличающееся тем, что, с целью повьвиения надежности работы, оно снабжено датчиком наличия перемещения объекта, блоком динамической памяти и схемами запрет, причем выходы двухканального генератора импульсов соединены с подготавливающими входами элементов памяти через схемы запрет, запрещающие входы которых соединены с выходом блока динамической памяти, входы которого соединены с датчиком наличия перемещения объекта и выходами двухканального генератора импульсов. Источники информации, принятые во внимание при экспертизе i. Авторское свидетельство СССР №463599, кл. В 65G 47/46, 10.01-.72.
