Изобретение относится к области электротехники, В частности к асинхронным электродвигателям возвратно-ностунательного движения, и предназначено д,г1я использования иреимущественно в погружном варианте для привода глубинных насосов поршневого типа В скважинах.
Известен асинхронный электродвигатель возвратно-поступательного движения, состоящий из индуктора с многофазной обмоткой и зубчатого магнитопровода, якоря, в пазах которого расположена короткозамкнутая обмотка, и датчиков положения. Датчики положения состоят из стержня постоянного магнита, прикрепленного на кронштейне к одной из боковых сторон якоря, и двух катушек индуктивности, установленных по торцам индуктора и закрепленных на внутренней боковой поверхности корпуса электродвигателя I.
Однако такое расположение катушек и магнитного стержня датчиков увеличивает поперечные габариты электродвигателя, что не позволяет использовать его в качестве привода глубинных насосов поршневого типа.
Известен и другой асинхронный электродвигатель возвратно-поступательного движения, содержащий индуктор с многофазной обмоткой и зубчатым магнитопроводом, по торцам которого установлены катушки индуктивных датчиков конечных положений и якорь, В пазах которого размешена короткозамкнутая обмотка. Якорь выполнен на концах утолп енным 2.
Диаметр рабочей части якоря электродвигателя, на которой размешена короткозамкнутая обмотка, меньше диаметра якоря на концах, при выводе рабочей части якоря из катушки датчика и вхождении В нее конца якоря большого диаметра по сталн зазор уменьшается, реактивное сопротивление датчика увеличивается и магнитные пускатели схемы управления отключают питание электродвигателя, подготавливая схему для реверса.
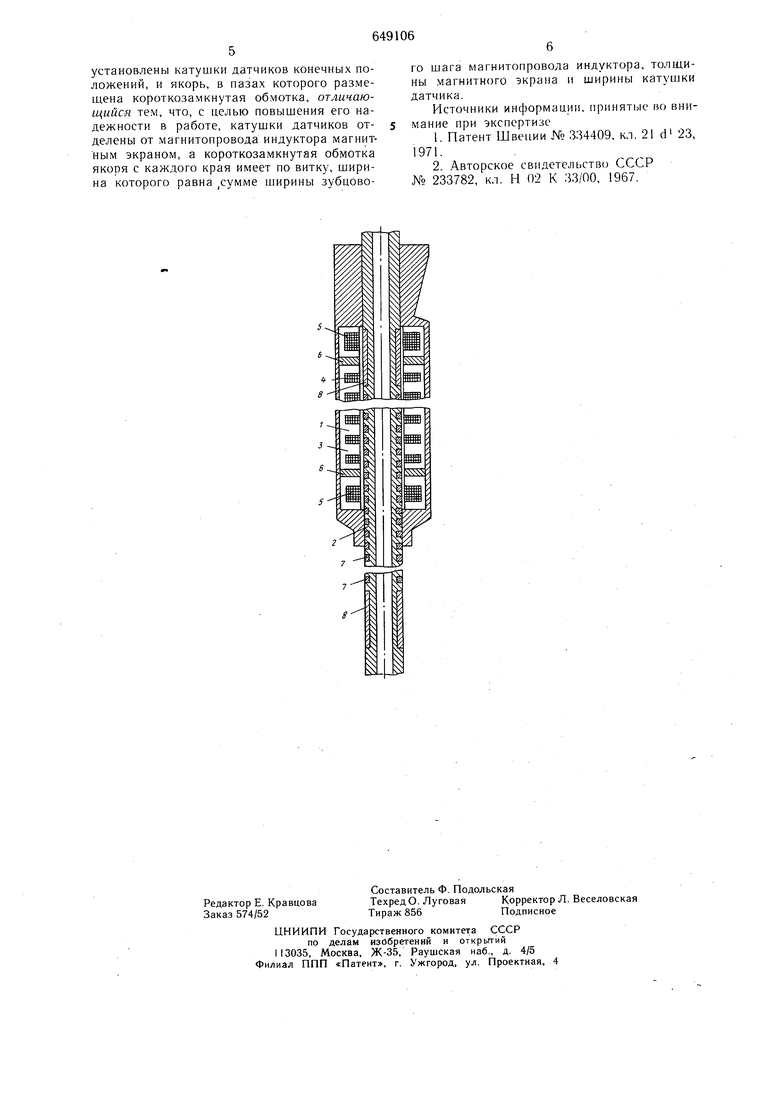
Недостатком этого электродвигателя яв-ляется то, что для питания схемы управления требуется дополнительный источник напряжения, так как непосредственное подключение схемы управления к двум фазам источника питания электродвигателя ведет к попадаиию в цепь управления, высокого потенциала напряжения электродвигателя, что снижает надежность в работе элементов управления. Кроме того, индуктивные датчики, работающие гш нринципу изменения реактивного сопротивления при изменении воздушного зазора в магнитопроводе датчика, характеризуются недостаточной чувствительностью. Чувствительность датчика зависит от кратности изменения воздушного зазора и может быть недостаточной при некоторых видах выполнения якоря, например, если активное покрытие якоря выполнено достаточно тонким или если якорь выполнен в виде короткозамкнутой обмотки с закрытыми пазами. Недостаточная чувствительность датчика может привести к ненадежному срабатыванию схемы управления электродвигателя. К недостаткам электродвигателя относится также отсутствие специального тормоза якоря после отключения питания. Под действием силы инерции концевой участок якоря может пройти зону катушки датчика и остановиться в зоне индуктора, что снижает пусковое усилие для движения якоря в обратном направлении. Целью изобретения является повышение надежности электродвигателя в работе путем формирования сигнала управления в виде ЭДС непосредственно в катушках датчиков конечных положений. Это достигается тем, что в предложенном асинхронном электродвигателе возвратно-поступательного движения, содержашем индуктор с .многофазной обмоткой и зубчатым магнитопроводом, по торцам которого уставовлены катушки датчиков конечных положений, и якорь, в пазах которого размешена короткозамкнутая обмотка, катушки датчиков отделены от магнитопровода индуктора магнитным экраном, а короткозамкнутая обмотка якоря с каждого края имеет по витку, ширина которого равна сумме ширины зубцового шага магнитопровода индуктора, толшины магнитного экрана и ширины катушки датчика. , На чертеже схематически изображен предложенный электродвигатель, продольный разрез. Асинхронный электродвигатель возвратно-поступательного движения содержит цилиндрический индуктор 1 и цилиндрический якорь 2. Индуктор 1 выполнен с зубчатым магнитопроводом 3, в пазы которого уложена трехфазная обмотка 4, а по торцам его установлены катушки 5 датчиков конечных положений. Датчики конечных т.оложений выполнены в виде трансформаторных датчиков. Катушки 5 этих датчиков отделены от магнитопровода 3 индуктора 1 магнитным экраном 6, толщина которого составляет не менее щирины паза якоря 2. Якорь 2 выполнен из ферромагнитного материала с пазами, в которых размещена короткозамкнутая обмотка 7. С каждого края якоря 2 короткозамкнутая обмотка 7 выполнена с витком 8 увеличенной ширины. Ширина такого витка оольше, чем ширина основного витка обмотки 7 и равна сумме ширины зубцового шага магнитопровода 3 индуктора 1, толщины магнитного экрана 6 и ширины катушки 5 датчика конечных положений. Датчики конечных положений являются элементами блока управления реверсом электродвигателя, который содержит также поляризованное реле и реверсивный источник питания. При подаче питания электродвигателю в индукторе 1 образуется бегущее электромагнитное поле, которое наводит ЭДС в короткозамкнутой обмотке 7 якоря 2, создающую электромагнитное поле якоря. В результате взаимодействия полей якорь 2 перемещается в индукторе 1. При подходе якоря 2 в крайнее положение, например верхнее (как показано на чертеже), магнитное поле трехфазной обмотки 4 индуктора, пересекая наиболее щирокую часть витка 8 короткозамкнутой обмотки 7 якоря 2, наводит в нем ЭДС, которая создает электрический ток по всей ширине этого еитка 8, а магнитное поле вокруг витка 8 наводит ЭДС в катушке 5 соответствующего трансформаторного датчика положения. Таким образом обеспечивается трансформаторно-электрическая связь между крайней катущкой обмотки индуктора и катущкой 5 датчика и формируется сигнал управления в виде ЭДС непосредственно в трансформаторном датчике. Магнитный экран 6 устраняет трансформаторную связь между обмоткой 4 индуктора и катущкой 5 датчика положения, а также исключает наведение сигнала в катушке 5 датчика от основных витков обмотки 7 якоря 2. Сигнал управления в виде ЭДС с катушки 5 датчика поступает в блок управления на обмотки-поляризованного реле, которое своими контактами управляет реверсивным источником питания. Поочередное поступление сигнала управления с катушек трансформаторных датчиков обеспечивает переключение поляризованного реле и, следовательно, осуществление реверса электродвигателя. В таком электродвигателе формирование сигнала управления в виде ЭДС осуществляется непосредственно в катушках датчиков конечных положений, что позволяет включать катушки датчиков в цепь управления. Величины этого сигнала (5-30 В) достаточно для надежного срабатывания схемы управления и не требуется дополнительной изоляции обмотки. Формула изобретения Асинхронный электродвигатель возвратно-поступательного движения, содержащий индуктор с многофазной обмоткой и зубчатым магнитопроводом, по торцам которого
установлены катушки датчиков конечных положений, и якорь, в пазах которого размен.1ена короткозамкнутая обмотка, отличающийся тем, что, с целью повышения его надежности в работе, катушки датчиков отделены от магнитопровода индуктора магнитным экраном, а короткозамкнутая обмотка якоря с каждого края имеет по витку, ширина которого равна сумме ширины зубцового шага магнитопровода индуктора, толш,ины магнитного экрана и ширины катушки датчика.
Источники информации, принятые во внимание при экспертизе
1.Патент Швеции № 334409, кл. 21 сР 23, 1971.
2.Авторское свидетельство СССР № 233782, кл. Н 02 К 33/00, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электродвигатель возвратно- пОСТупАТЕльНОгО дВижЕНия | 1979 |
|
SU847458A1 |
| Электропривод | 1975 |
|
SU597051A1 |
| Трансформаторный датчик положения ротора вентильного электродвигателя | 1976 |
|
SU688966A1 |
| Электропривод | 1976 |
|
SU660161A1 |
| Асинхронно-синхронный преобразователь частоты | 1974 |
|
SU692017A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| Синхронный редукторный электродвигатель | 1989 |
|
SU1713077A1 |
| Трехфазный асинхронный редукторный электродвигатель | 1983 |
|
SU1594656A1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С ЯВНОПОЛЮСНЫМ ЯКОРЕМ | 2010 |
|
RU2416860C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ЭЛЕКТРОМАГНИТНЫМ ВОЗБУЖДЕНИЕМ | 2009 |
|
RU2407134C2 |
