1
Изобретение относится к системам автоматического управления и может быть использовано в системах управ- пения движением объектов различного назначения.
Известны устройства для измерения параметров линейного движения объетов, с6{Гержапше чувствительные элементы,постоянно связанные магнитно, электромагнитно, электроста™ тнчески или механически с корпусом устройства. Эти связи, зачастую, сообщают устройству измерения параметров линейного движения ограничения по стойкости к механическим нагрузкам, влияют на быстродействие и точность его l.
Наиболее близким техническим решением является устройство, содержащее корпус, инерционное тело, не имеющее силовых связей с корпусом, емкост. ные Датчики перемещения и 8пектров ную схему обработки сигналов этик , датчиков .
Недостатком известного устройства являются низкие быстродействие и точность.
Целью изобретения является повышение точности при измерении параметров линейного движения объектов.
Поставленная цель достигается тем, что в устройство измерения параметров линейного движения, содержащее корпус, инерционное тело, не имеющее силовых связей с корпусом, неконтакт Hbse датчики перемещения чувствительного инерционного тела относительно корпуса, подключенные к схеме формирования выходного сигнала, введены узлы задания вибрационного движения инерционному телу (вибраторы),-устаноЕшенные по оси чуЕ ствительности устройства, и схема управления вибраторами, причем выход схемы формирования выходного сигнала соединен с управляющим входом схемы управления вибраторами.
В предлагаемом устройстве создается возможность адаптации устройства по шштельности цикла измерения к условиям функционирования в связи с тем, что частота колебаний инерцион- ноге тела меняется в зависимости от величины ускорения
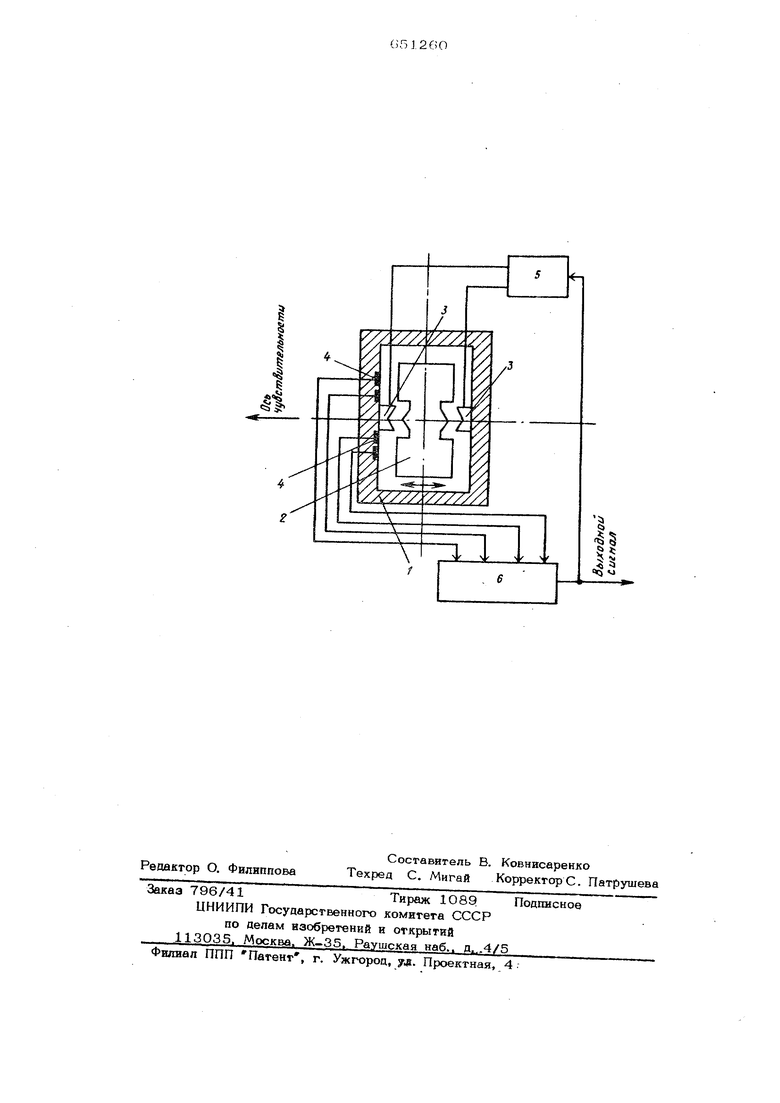
На чертеже представлена структур но-кннематическая схема предлагаемого устройства.
Устройство для измерения параметро линейного Движения объектов содержит корпус 1, инерпионное тело 2, узлы задания вибрационного движения (вибраторы) 3 инерционному телу 2, неконтактные емкостные датчики 4 перемещения инерционного тела вдоль показанной на чертеже оси чувствительности устройства, схему 5 задания вибрационного движения (управления вибраторами), схему 6 формирования выходного сигнала. Выход схемы формирования выходного сигнала является выходом устройства.
В исходном состо5тии все элементы устройства обеьточены и инерционное тело зафиксировано относительно корпуса узлами задания вибрационного движения, выступающими в данном случав в качестве арретиров. При включении устройства схема 5 рыдает сигнал рюзарретирования инерционного тела и сигнал задания ему вибрационного движения. При отсутствии ускорения по оси чувствительности прибора средняя точка траектории движения инерционного тела находится на равном удалении от вибраторов, расположенных по этой же оси. Неконтактные датчики измеряют мгновенное (текущее) значение положения инерционного тела относительно корпуса по оси чувствительности. Сигнал с неконтактных датчиков поступает в схему формирования выход кого сигнала. Этот сигнал передается в
ёортовое вычислительное устройство для обработки и в схекту задания вибрационного движения. Последняя формирует управляющий сигнал, поступающий на вход узлов задания вибрационного движения инерционному телу (вибраторов). При наличии ускорения средняя точка смешается. Схема формирования выходного сигнала на основе данных о текущих значениях положения инерционного тела и смещении средней точки, а также данных о задаваемой длительности цикла измерения выдает сигнал, пропорциональный ускорению.
ЕЪзможность изменения частоты вибрации инерционной массы в зависимости от величины измеряемого ускорения сообщает устройству возможность адаптации по длительности цикла измерения к условиям функционирования.
Формула изобре
тения
Устройство для измерения параметров линейного движения объектов, содержашее корпус, инерционное тело, не имеющее силовых связей с корпусом, неконтактные датчики перемещения инерционного тела относительно корпуса, подключенные к схеме формирования выходного сигнала, отличающееся тем, что, с целью повышения точности измерения, оно снабжено вибраторами, установленными по оси чувствительности устройства, и схемой управления внбраторакш, при этом выход схемы формирования соединен с управляющим входом схемы управления вибраторами.
Источники информации, принятые во внимание при Экспертизе
1.Горенщтейн И. А., Шульман И. А Инерцион{1ые навигационные системы. М., Машиностроение, 1970, с. 98.
2.Журнал Электроника № 17, 1973, с. 15-16.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения параметров линейного движения объекта | 1974 |
|
SU540214A1 |
| Дифференциальный пьезоакселерометр с частотным выходом | 1977 |
|
SU678429A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| Способ управления характеристикой вибрационного поля и устройство для его осуществления | 2015 |
|
RU2624829C1 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |
| Электродинамический вибратор | 1981 |
|
SU986509A1 |
| Вибратор с резонансной настройкой | 2022 |
|
RU2816833C1 |
| Устройство для измерения абсолютного значения ускорения силы тяжести | 1978 |
|
SU771594A1 |
| Способ и устройство контроля динамического состояния взаимодействия элементов двигателя локомотива | 2017 |
|
RU2691461C2 |
| СПОСОБ ВИБРАЦИОННЫХ ИСПЫТАНИЙ ЭЛЕКТРОМЕХАНИЧЕСКИХ ОБЪЕ'КТОВ | 1970 |
|
SU259232A1 |