(54) УСТРрЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ НАМОТОЧНЫМ СТАНКОМ
.:-,-2 углов намотки Л гичп ttiax дискретность задания угла намотки Д« Требуемые линейные ckdiSbcTH механизмов нри намотке под углом об o-V-sknoG для ведущего- механизма оправк, Y V-COBo6 для ведомого механизма (салазок). Частота задания программы ведомо 1го К1ех;анйзма,. f COSo6 f, coSoC. Максимальная частота импульсного да чика положения i ОП1 определяется дискретностью задания угла намотеи и и тем обстоятельством, что коэффицие Деления первого счетчика может меня тольжо на целое число. Учитьтая, что ()i. получаем (, ОСгп4П + Ло )- «min в частности, при об „ 20 omiOOicm Это соотношение показывает, что приншш построения СПУ с ведущим м ханизмом требует значительного увели чения частоты программы с ведущего механизма. Частота i в устройстве 31 :piaBHa : лг - ;:. 4«.«и.-| - , Т -at) где На . - число импульсов на оборо датчика .оправки; - перепаточное число редуктора между валом датчика и валом оправки. Для вьшолнения соотношения (1) в устройстве применен повышающий редуктор со ступенчато-регулируемым в пределах «100-1000 передаточны числом, причем входной вал редуктора соединен не непосредственно с валом ведущего механизма, а с. элементами промежуточной кинематической цепи.
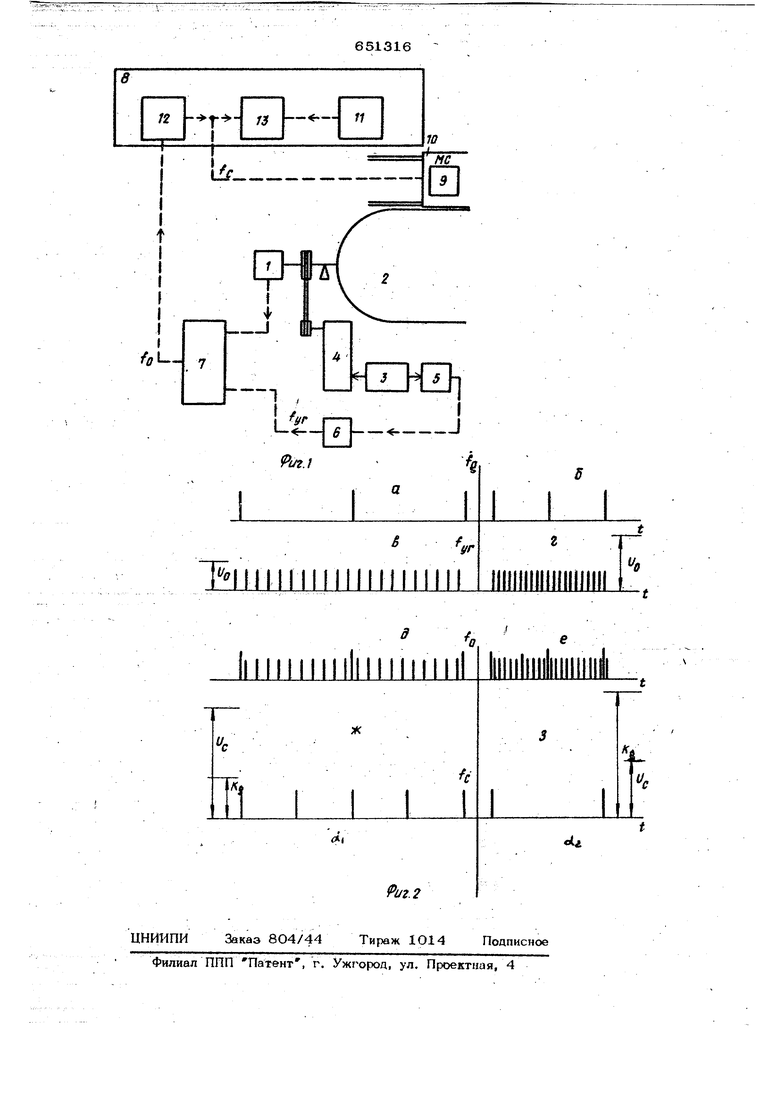
651316 Эг® решение приводит к снижению точности задания программы из-за неизбежных собственных погрешностей повышающего редуктора, люфтов и податливости элементов силовой переда-, чи между валом оправки и валом датчика положения, а следовательно и к снижению точности устройства. Цель настоящего изобретения - повышение точности устройства -. достигается тем, что в устройство введены последовательно соединенные датчик скорости, подключенный к п иводу ведущего механизма, управляемый генератор Частоты и импульсный умножитель, а датчик положения установлен на в.алу ведущего механизма и соединён с силовым редуктором и с одним из входов импульсного умножителя, выход которого подключен ко входу первого счетчика импульсов. , На фиг. 1 представлена блок-схема устройства, на фиг. 2 - временная диаграмма его работы. Устройство содержит датчик положения 1, ведущий механизм 2, привод ведущего механизма 3, силовой редуктор 4, датчик скорости 5, управляемый генератор 6 частоты, импульсный умножитель 7, узел преобразования программы 8 и привод 9 ведомого механизма 10, причем узел преобразования программы 8 содержит блок задания программы 11 и первый 12 и второй 13 счетчики импульсов. Частота импульсов датчика положения 1 равна. YO V «--5inq6.(3) «АЛ а их число пропорцйоналыю углу пово-. рота механизма 2. Вал двигателя привода 3 соединен с валом датчика ско- -, рости ё, напримерjraxoreHepaTOpa, выход которого подключен кЬ входу генератора 6, частота которого ,. yrV-S4no6 (4) пропорциональна скорости вед щего механизма 9, причем выбирается Sr Выход генератора 6 подключен к первому ВХОДУ умножителя 7, а ко вто-«. рому входу преобразователя подключен .йыход аагтк.а положения 1. 5. Число импульсов на выходе умножителя 7 , . - (5) rfleNp-f orn/i cm коэффициент, a частотаэтих импульссда i.-i Y. i(5j, S ПоС f Импульсы. IQ с выхода умножителя 7 поступают на вход счетчика .12, управляющего приводом 9 ведомого механиз ма 10 (салазок), перемещение которог подсчитывается счетчиком 13 и при ег ссюпадении с заданным блоком 11 происходит останов, а затем реверс ведомого механизма10. Принцип действия предлагаемого устройства состоит в получении электр ческим путем сигнала f на выходе .умножителя, удовлетворяющего условиям (1). Это достигается заполнением интервала между импульсами i р- датчика 1 импульсами 1 цр генераторЖ 5, частота которых пропорциональна скорости веду щего механизма. Умножитель 7 про пускает на вход узла 8 число импульсов частоты i .f определяемое, вьгражением (5), являясь электрическим повышающим редуктором. Работа предлагаемого устройства поясняется временной диаграммой (фир. 2) для двух значений угла намот ки oCj и ot 2 . На фиг. 2 а,б изображе на последовательность импульсов датчи ка положения 1, имеющая частоту, f л На фиг. 2 в,г показаны значения скорости VQ ведущего механизма для заданных углов намотки и последовательност импульсов на выходе генератора 5, частота которых i ц пропорциональна значению скорости YQ. Для наглядности изображен каждый десятый импульс после довательности, f j.. Нафиг. 2 д,е показана; последовательность импульсов i о на выходе умножителя 7, полученная в результате заполнения интервала между импульсами ig- частотой i . . Число импульсов, заполняющих интервал, строго постоянно даже при отклонениях i ур от значений, определяемых выражением (4) Это число определяется коэффициентом Np.. На фкг. 2 ж,э иэобр)ажены последовательности импульсов задания пере16мещения ведомого механизма, величи1пл скорости салазок У и коэффициент деления Кб счетчика 12 узла 8. На фиг. 2ж1р,у последовательность импульсов if. обладает высокой равномерностью, а число импульсе i ( находитсяв соответствии с числом импульсов i g , определяемым соотнощением. В результате достигается высокая равномерность задания скорости механизма салазок при точности задания программы перемещения в пределах одной дискреты, причем на точность задания Программы не оказьюают влияния погрешности силовой передачи и повышакнщего редуктора между ведущим механизмом и датчиком положения. Ф-ормула изобретения Устройство для программного управления намоточным станком, содержащее датчик положения, силовой редуктор, соединенный с ведущим механизмом и с приводом ведущего механизма, и первый счетчик импульсов, подключенный к приводу ведомого механизма и к первому входу второго счетчика импульсов, второй вход которого соединен с выходом блока задания программы, отличающееся тем, что, с целью повьцления точности устройства, в него введены последовательно соединенные датчик скорости, подключенный к приводу ведущего механизма, управляемый генератор частоты и импульсный умножитель, а датчик положения установлен на валу ведущего механизма и соединен с силовым редуктором и с одним из входов импульсного умножителя, выход которого подключен ко входу первого счетчика импульсов. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР NO 420986, кл. q 05 В 19/18, 1971. 2.Авторское свидетельстве СССР № 350664, кл. В 29 D 3/02, 1970. 3.Патент. ФРГ № 1629304, кл. , 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления намоточным станком | 1980 |
|
SU881670A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Устройство натяжения провода к станкам для намотки электрических катушек | 1983 |
|
SU1149806A1 |
| Пружинонавивочное устройство | 1973 |
|
SU478656A1 |
| Установка автоматической намотки катушки | 2021 |
|
RU2773986C1 |
| Намоточное устройство | 1981 |
|
SU994386A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| Устройство для программной закалки длинномерных изделий | 1982 |
|
SU1052554A1 |
| Устройство для кинематического дробления стружки на токарных станках с числовым программным управлением | 1981 |
|
SU1004974A1 |
| Измеритель текущего значения радиуса рулона | 1980 |
|
SU883649A1 |