(54) СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Управляющее устройство | 1983 |
|
SU1161916A1 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ ЛОКАЦИОННОЕ УСТРОЙСТВО | 2005 |
|
RU2304792C1 |
| Система автоматического управления инерционным объектом | 1977 |
|
SU962849A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННЫХ СЛЕДЯЩИХ СИСТЕМ | 1995 |
|
RU2093850C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2487365C1 |
| Устройство для управления инерционным объектом | 1977 |
|
SU744449A1 |
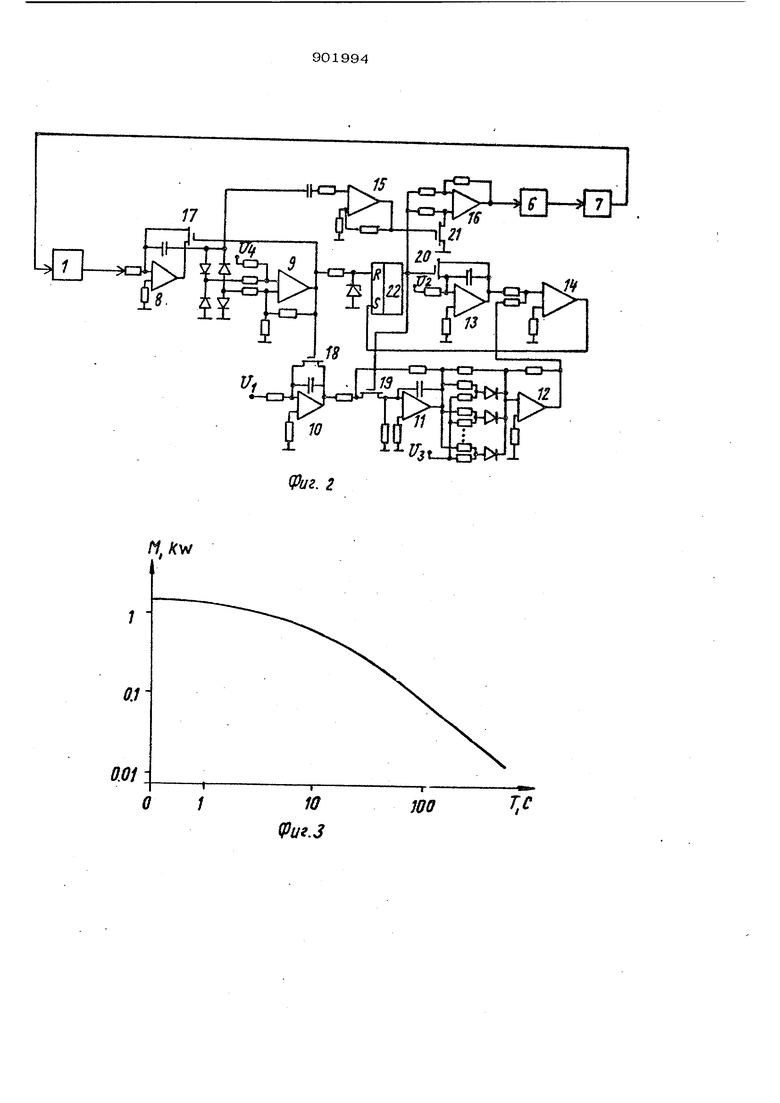
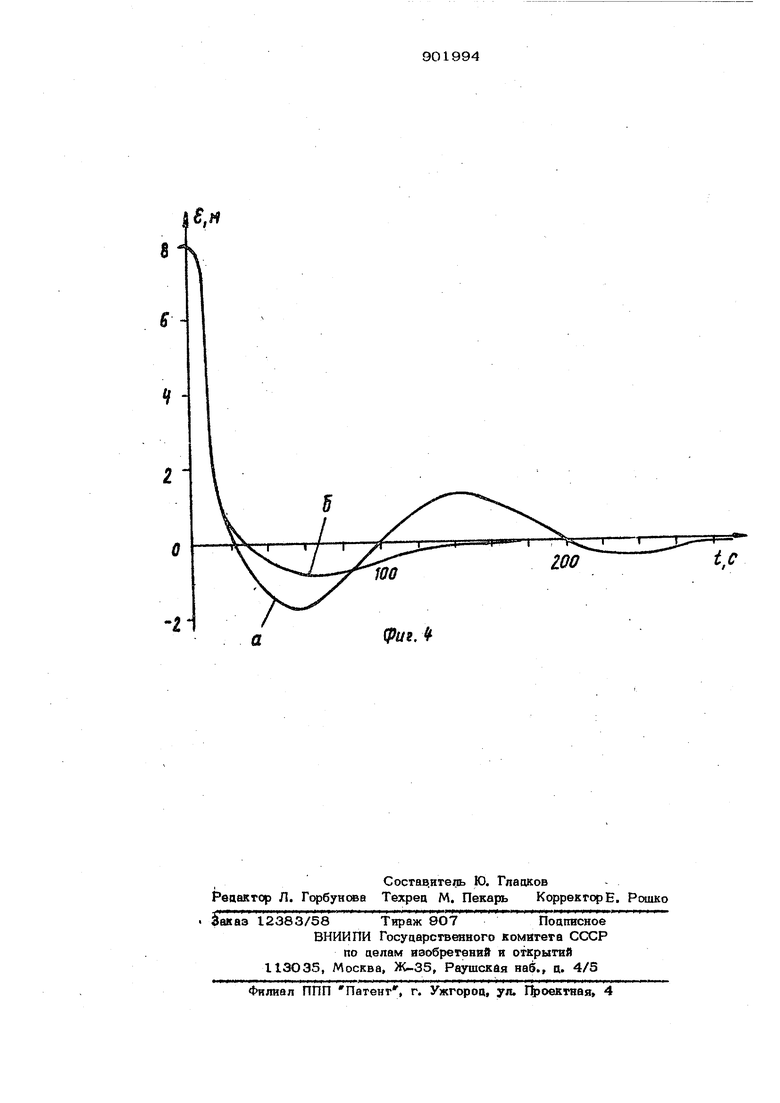
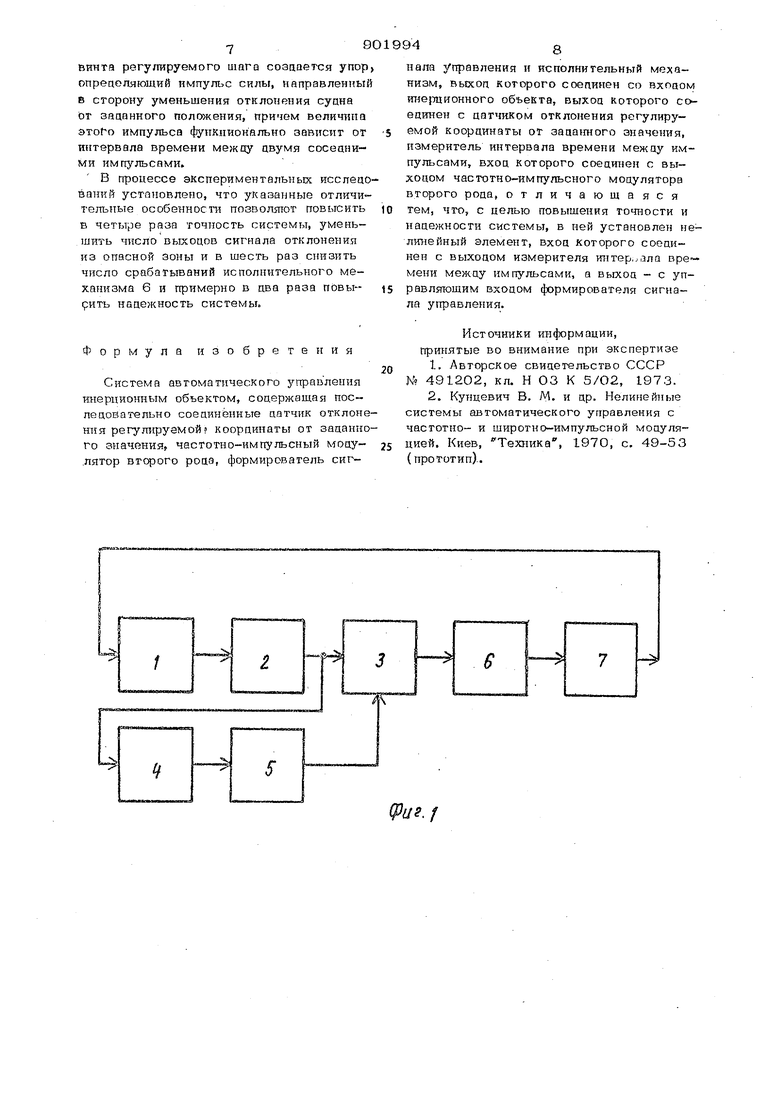
Изобретение относится к аискретным системам автоматического управления, в частности к системам автоматического управления с частотно-импульсной моауляцией второго роца, и прецназначено цля управления суаном цля буровой ус тановки, нахоаяшегося в условиях возмущенной внешней среаы. Известна частотно-импульсная система управления, содержащая частотно-импульсный модулятор второго роаа, выхоа которого соецинен со вхоцом формирователя сигнала управления, выполненного по схеме ждущего мультивибратора с регулируемой длительностью и-мпульсов, измеритель интервала времени между импульсами вход которого соединен с выходом частотно-импульсного модулятора второго роas, а выход - с управляющим входом формирователя сигнала управления, выход котфого соединен со входом исполнительного механизма tl3 . Недостатками известно системы являются ее низкая динамическая точность из-за того, что закон изменения мощности выходных импульсов формирователя сигнала управления не учитывает цинамических свойств судна, предназначенного для буровой установки, и низкая надежность из-за большого числа срабатьгоаняй исполнительного механизма, что существенно снижает их ресурс. Наиболее близкой к предлагаемой по технической сущности является система автоматичэского регулирования инерционным объектом, содержащим датчик отклонения регулируемой величины от зацанного значения, выход которого через частотно-импульсный модулятор второго рода и измеритель интервала времени между импульсами соединен соответственно с сигнальным и управляющим входами формирователя сигнала управления, выход которого через исполнительный механизм соединен со входом инерционного объекта, выход которого соединен со входом лвт- чика отклонения регулируемой косрдинаты от заданного значения t2 . 3&0 в известной системе в силу особеннос тей эксплуатации судов с установками цля бурения, заключаюшкхся в том, что исполнительные механизмы не цолжны реагировать на составляющую сигнала отклонения, обусловленную волнами, времязацающий фильтр модулятора не должен содержать дифференцирующих звеньев. Тр бования по точности режима стабилизации судна с установкой для бурения также накладывают ряд ограничений на виц времяэадающего фильтра модулятора. Во избежание появления экбивалентоо зоны нечувствительности по сигналу отклонения времязадающий фильтр должен представлять собой звено без самовырапнийания. TQK как алгоритм изменения мощности на выходе формирователя сигнала управления не учитывает динамических свойств инерционного обьекта - судна для буровой установки, динамическая точ ность известной системы низка, следстви ем чего является уменьщение ресурса ис полнительного механизма и низкая надеж ность системы. Цель изобретения - повышение точнос ти и надежности системы. Поставле.шая цель достигается тем, что в системе автоматического управле ния инерционным объектом, содержащей i последовательно соединенные датчик отклонения регулируемой координаты от за,данного значения, частотно-импульсный модулятор второго рода, формирователь сигнала упра&ления, и исполнитеглный ме ханизм, выход которого соединен со входом инерционного обьекта, выход которог соединен с датчиком отклонения регулируемой Координаты от заданного значения измеритель интервала времени межоу импульсами, вход которого соединен с выходом частотно-импульсного модулятора второго рода, дополнительно установлен нелинейный элемент, выход которого соединен с выходом измерителя интервала времени между импульсами, а выход - с управляющим входом формирователя сигнала управления. Статическая характеристика нелинейного элемента определяется из условий сохранения заданных запасов устойчивости по модулю и фазе системы управления пля гармонических линеаризованньсх управлений, на которых можно получить вы ражения, определяющие функциональный закон изменения мощности выходных импульаов формирователя сигнала управления от текутКего значения интервала вре мени между цвумя соседними импульсами 44 В качестве уравнений для определения функционального закона используются следующие неравенства: 7().2J№)±EzMj /1-лй. Of, л (w) - Ф(СО).Л-ля ё М((0)4 де (UJ)- фазовая частотная х рактеристика непрерывной линейной части системы; ш- круговая частота; ft (,LU) - амплитудная частотная характеристика непрерывной линейной части системы; iU И b-f - запасы устойчивости соответственно по модулю и фазе, выбираемые из условия обеспечения требуемых показателей качества свободных цвижений системы; Tttu) - текущий интервал времени между двумя соседними импульсами; Vi l,ui) - мощность импульсов на выходе формирователя сигнала управления. Заменяя неравенства равенствами можно сопоставить каждому значению круговой частоты единственное значение текущего интервала времени Т и мощности импульсов A . Далее, исключая частоту О) из выражений (I) и (2), можно найти функциональный закон изменения мощное- ти импульсов от времени М( ), который определяет косвенно зацанную точность динамических гфоцессов систем управления. При этом значительно снижается число включений исполнительного механиама. - гидропривода поворота лопастей винта регулируемого щага. На фиг. 1 представлена схема системы; на фиг. 2 - принципиальная электрическая схема одного из возможных вариантов системы; йа фиг. 3 - статическая характеристика нелинейного элемента; на фиг. 4 - гра-фики сигналов отклонения регулируемой координаты от заданного значения в предлагаемой (б) и известной (а) системах. Система автоматического управления инерционным объектом содержит датчик 1 отклонения регулируемой координаты от зааанного значения, частотно-импульсный моаулятор второго роаа 2, формкроватеп 3 сигнала управления, измеритель 4 ин тервала времени межау импульсами, нелинейный элемент 5, исполнительный механизм 6, инерционный обьект 7, операционные усилители 8 - 16, ключи 17 21 и триггер 22. Кроме того, на чертежах обозначены: и ) П1 Ja и -л.- опорные напряжения, М -мощность импульсов формирователя сигнала управления, Т - интервал времени межау авумя соседними импульсами, - сигнал отклонения регулируемой коораинаты от заданного значения, t- те кущее время. Датчик 1 отклонения регулируемой координаты от заданного значения прецставляет собой cиcтe y ультразвуковых передатчиков, расположенных на морском дне в окрестности буровой скважины, и соответствующую систему приемников, располагаемых на борту судна цля буровой установки. Исполнительный механизм 6 представляет собой гидропривод лопастей винта регулируемого шага, регулируемого шага, вращающийся от двигателя постоянной скорости. Частотноимпульсный модулятор второго рода 2 состоит из интегратора, реализованного на операционном усилителе 8, релейного элемента с зоной нечувствительности Д , реализованного на операционном усилител 9, зона нечувствитешэности д формиру:ется с помощью опорного напряжения кл,оча 17 на полевом транзисторе. Формирователь 3 сигнала управления предстазля ет собой жцущий мультивибратор с управля емой длительностью импульсов и состоит триггера 22, интегратора, реализованного на операционном усилителе 13 и устанавливаемого в нулевое состояние с помощью транзисторного ключа 20, и релейного элемента на операционном усилителе 14. Измеритель интервала времени между импульсами представляет со- бой последовательное соединение интегра- ра, реализованного на операционном усилителе 10 с ключом 18 в-цепи обратной связи, и элемента выборки-запоминания для фиксации измеренного значения интервала времени между двумя соседними импульсами на время срабатывания формирователя сигнала управления, реализованного на операционном усилителе 11с ключом 19 на входе. Функциональный закон изменения мощности импульсов формирователя 3 сигнала управления от интервала времени между импульсами вводится с помощью нелинейного элемента, реализованного на операционном усилителе 13, и кусочно аггпроксимнруюшего вы,численную зависимость i т ). Полярность выходных импул т|Сов восстанавливается модулятором, реализованным с помощьюоперационного усилителя 9 .и ключа 21, в соответствии с полярностью времязоцающего фильтра-интегратора, реализован- ного на операционном усилителе 8. Сиг- нал полярности на интервале времени между двумя сосеаними импульсами фиксируется релейным элементом, реализо:ванным на операционном усилителе 15. Система работает следующим образом, Сипсал отклонения регулируемой кофдинаты от заданного значения (т.е. сигнал отклонения текущего положения судна от заданного положения) с выхода датчика I поступает на вход чпстотноимпульсного модулятора 2,который преобразует сигнал отклонения судна от заданного положения в последовательность импульсов, модулированных по частоте. Параметры частотно-импуль сного модулятора 2 (зона нечувствительности л. релейного элемента, выполненного на операционном усилителе 9) выбираются с учетом возможного уровня центрированной составляющей сигнала отклонения судна таким образом, чтобы в отсутствии постоянной составляющей сигнала отклонения моаулятор не реагировал на центральную составляющую, обусловленную волнами. Импульсная последовательность с выхода модулятора 2 поступает на вход формиро 3 сигнала управления, на выходе которого формируются прямоугольные импульсы амплитудой А с полярностью, со- ответствующей полярности выходных импульсов частотно-импульсного модулятора 2, и длительностью, определенной на основании интервала времени между импульсами, измеренного измерителем интервала времени между импульсами 4 в соотвегствии с функциональным законом, задаваемым нелинейным элементом 5, статическая характеристика которого определяется по заданным показателям качества ДЙ частотных характеристик линеаризованной системы 0. ( jj) и v ( uj). С выхода формирователя 3 сигнала угфавле- кия импульсы, модулированные по частоте, длительности и полярности, воздействуют на исполнительный механизм 6, выполненный в виде гидропривода поворота лопастей винта регулируемого щага, при- Ьодимого во вращение двигателем постоянной скорости. При повороте лопастей винта регутфуемого шага соэцается упор опрецолягощий импул1: с силы, направленны в сторону уменьшения отклонения суцна от заданного положения, причем величина этого импульса функционально зависит от интервала времени межцу цвумя сосешшми импульсами, В процессе экспериментальных исспецо йаний установлено, что указанные отличительные особенности позволятот повысить в четыре раза точность системы, уменьшить число вькоцов сигнала отклонения из опасной зоны и в шесть раз снизить число срабатываний исполнительного механизма 6 и примерно в цва раза поаы9ить надежность системы. Формула изобретения Система автоматического управления инерционным объектом, содержащая последовательно соединенные датчик отклоне ния регулируемой координаты от заданно го значения частотно-импульсный моду.лятор второго рода, формирователь сигнала управления и исполнительный механизм, выхоц которого соединен со входом ине 1ционного объекта, выход которого соединен с датчиком отклонения регулируемой координаты от заданного значения, измеритель интервала времени между импульсами, вход которого соединен с выходом частотно-импульсного модулятора второго рода, отличающаяся тем, что, с целью повышения точности и надежности системы, в ней установлен нелшшйный элемент, вход которого соединен с выходом измерителя интеро.эла времени между импульсами, а выход - с управлятощим входом формирователя сигнала управления. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 491202, к л. Н ОЗ К S/O2, 1973. 2.Кунцевич В. М. и др. Нелинейные системы автоматического управления с частотно- и широтно-импульсной модуляцией. Киев, Техника, 1970, с, 49-53 (прототип)..
/V,/fw
O.Oi10
0 1 Фиг.З
ЮО
qPtf г.
