Изобретение относится к автоматизации и механизации кузнечно-штамповочных работ и может быть использовано преимущественно с ковочными вальцами при вальцовке заготовок, неустойчивых к продольному изгибу.
Известны манипуляторы к ковочным валь цам, кинематически связанные с приводом последних.
Известные манипуляторы содержат совершающий под действием привода возвратнопоступательные перемещения в.аоль оси ползун, несущий хобот с клещевым захватом, и пружину возврата заготовки в рабочую зону с одновременным ее разворотомна 90° вокруг оси 1.
Известные манипуляторы не обеспечивают натяжения заготовки в процессе вальцовки, т. е. не позволяют вальцевать заготовки, неустойчивые к продольному изгибу.
Известны также манипуляторы к ковочным вальцам, содержащие ползун в виде каретки продольного перемеп1ения, установлен 1ый на -станине с возможностью возвратно-поступательного перемещения под действием выходного звена привода, напри
мер, кулачково-рычажного механизма. На ползуне манипулятора расположен хобот с клещевым захватом, имеющим возможность поворота вокруг продольной оси посредством механизма поворота, выполненного в виде зубчато-реечного зацепления. Для натяжения заготовки в процессе ее вальцовки имеется механизм натяжения, a на станине укреплены неподвижные yrtopbi, задающие определенную последовательность действия всем механизмам устройства 2.
Известные манипуляторы обеспечивают натяжение заготовки в процессе вальцовки, дают возможность избежать продольного изгиба отвальцованной части заготовки, но обладают недостаточно высокой производительностью и имеют сложную кинематику.
Целью изобретения является повыщение производительности и упрощение конструкции.
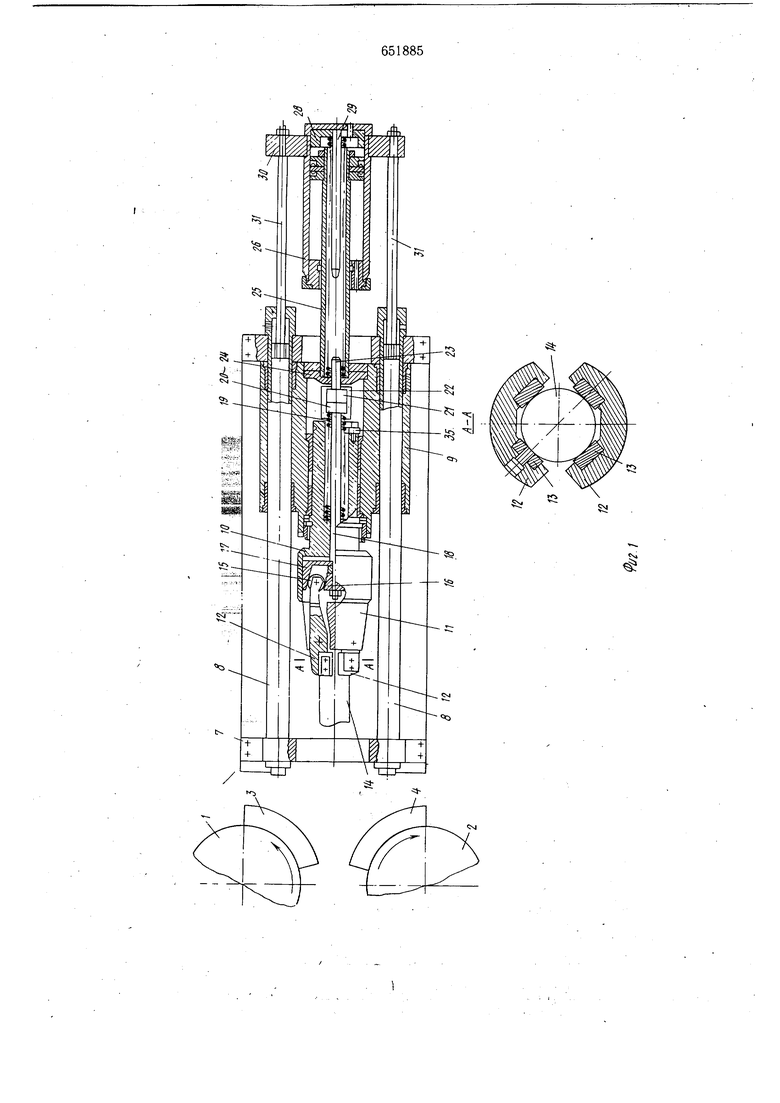
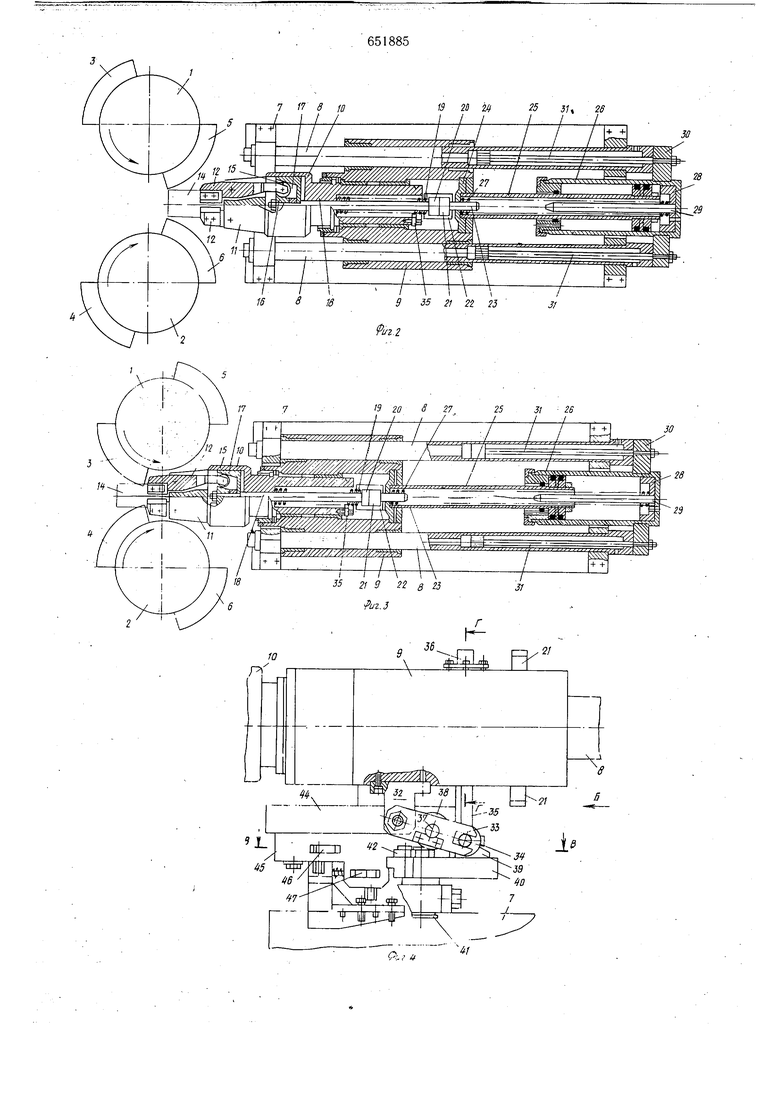
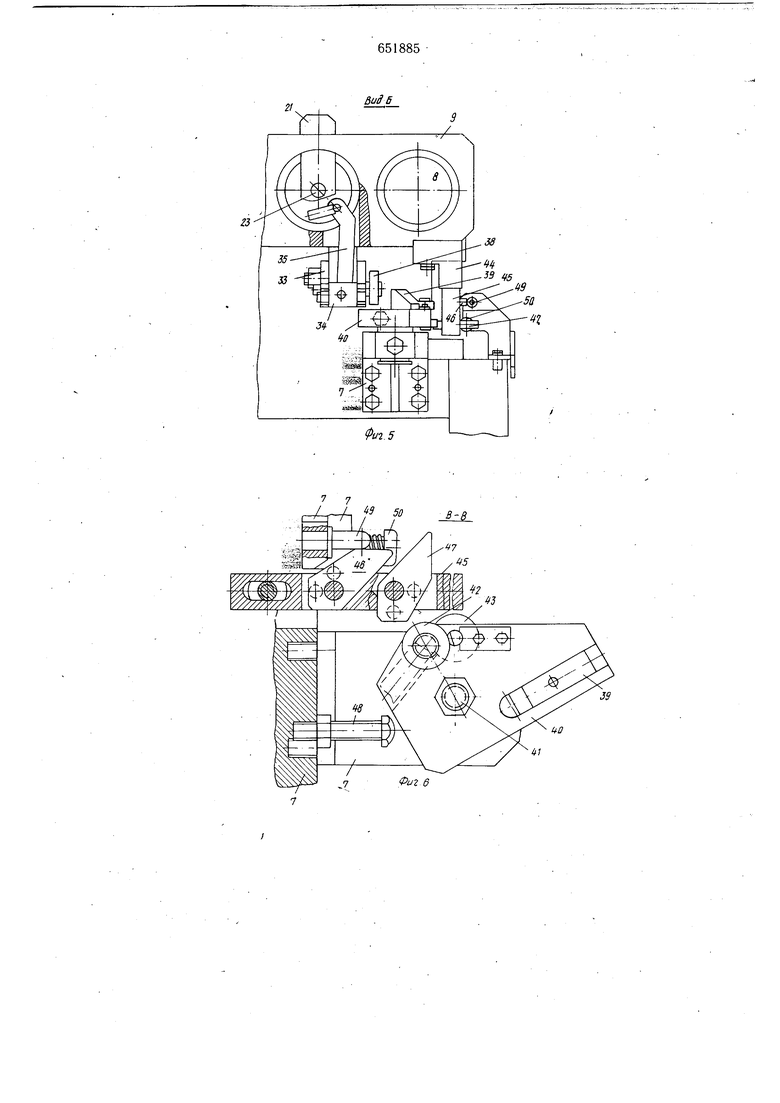
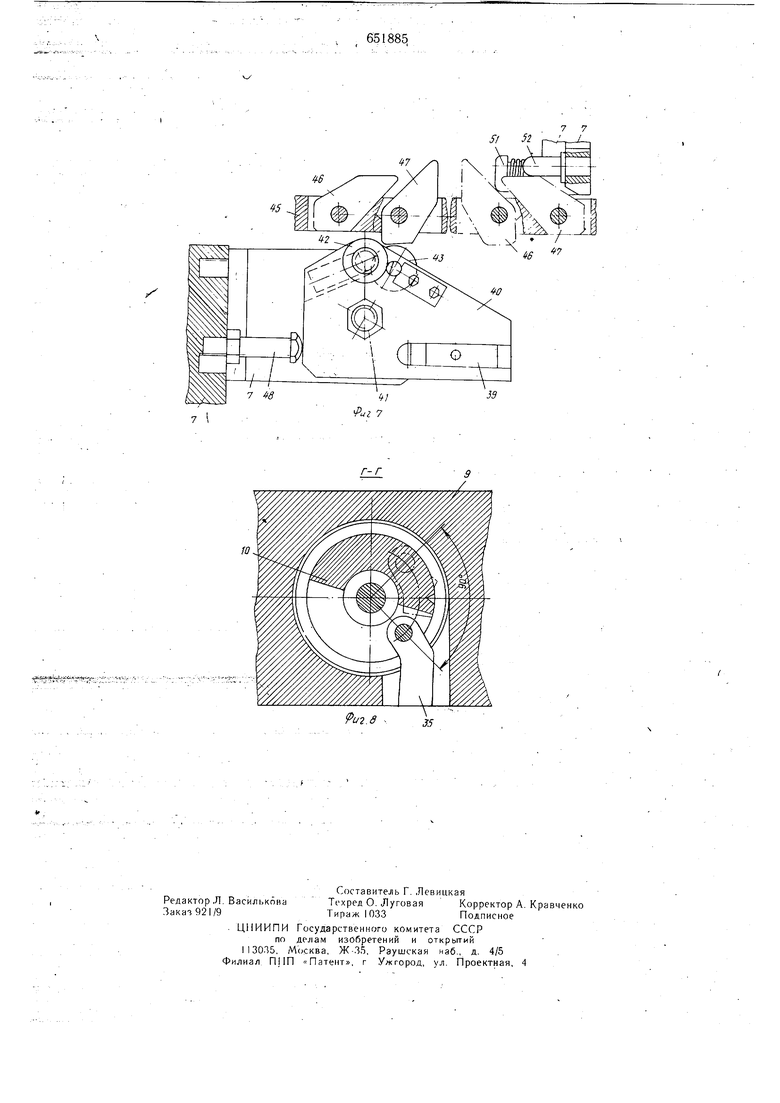
Достижение поставленной цели обеспечивается тем, что в отличие от известных манипуляторов, содержащих установленный на станине с возможностью возвратно-поступательного перемещения под действием выходного ззена привода ползун с размещенным на нем хоботом, имеющим возможность вращения вокруг продольной оси посредст.вом механизма поворотзч механизм натяжения заготовки и укрепленные на станине неподвижные упоры, в предлагаемом манипуляторе механизм натяжения заготовки выполнен в виде укрепленного на выходном звене привода пневмоцилиндра одностороннего действия с рабочей полостью, расположенной со стороны подпружиненного штока, жестко соединенного с ползуном. Ме.ханизм поворота манипулятора выполнен в виде кривошипно-шатунного механизма, шатун которого шарнирно связан с хоботом, а кривошип смонтирован на ползуне с возможностью поворота под действием качающегося копира, расположенного на станине и получающего движение от размещенных на ползуне двуплечих качающихся рычагов, установленных с возможностью взаимодействия одними концами с копиром, а другими - с неподвижными упорами. На фиг. 1 показаны рабочие валки вальцов с манипулятором на позиции загрузки заготовки и выдачи отщтамповаНной поковки (разрез в плане, валки условно повернуты на 90°) и разрез А-А; на фиг. 2 - манипулятор с заготовкой совершил предварительный ход к штампам; на фиг. 3 - манипулятор подал заготовку в заготовительный штамп (начало вальцовки); на фиг. 4 - маяипулятор и орган поворота хобота, вид сбоку; на фиг. 5 - вид по стрелке Б на фиг. 4; на фиг. 6 - разрез В - В на фиг. 4, копир в нерабочем положении; на фиг. 7 - то же, копир в рабочем положении; на фиг. 8 - разрез Г-Г на фиг. 4 (пружинный фиксатор не показан). Манипулятор к ковочным вальцам, содержащим рабочие валки I и 2 с закрепленными на ни-х штампами 3, 4, 5 и 6, из станины 7, на которой неподвижно закреплены две цилиндрические направляющие 8. На направляющих 8 установлен с возможностью возвратно-поступательного перемещения ползун 9, в котором с возможностью только вращательного движения установлен корпус 10 хобота, в утолщенной части которого установлено неподвижно основание 11. К основанию II шарнирно прикреплены два рычага 12, на одних концах которых закреплены пластины 13 для удержания заготовки 14, на других концах шарнирно закреплены ролики 15, которые постоянно находятся в контакте с конусом 16 и конусной втулкой 17. Конус 16 и конусная втулка 17 подвижно входят в фигурный паз основания II, образуя двойной закрытый к(Я1ир, и жестко закреплены на подвижной штанге 18, кс)Т()1)ая установлена в центра:1ьн()е слверстие к())пуса К). Штангу 18 охватывает пружина 19, к()Т(;|;ая (.)дним торцом гм1ирае1ся на ки|)пус И) хобота; а вторы.м на 111айб 20, Ж1ч-|ко закрепленную на торце гнтанги 18. Шайба 20 постоянно находится в контакте с планкой 21, концы которой выходят за пределы ползуна 9 через его окна 22. Планка 21 жестко закреплена на оси 23, которая подвижно установлена в упоре 24, жестко прикрепленном к ползуну 9. К упору 24 жестко прикреплен полый шток 25 механизма натяжения заготовки, который выполнен в виде подвижного в осевом направлении цилиндра 26 одностороннего действия. Рабочая полость цилиндра 26 расположена со стороны штока, а поршневая полость постоянно соединена с атмос ферой. В полом щтоке 25 установлена пружина 27, которая одним торцом упирается в упор 24, а вторым - в крыщку 28 цилиндра, где закреплена направляющгя 29 для пружины. Цилиндр 26 прикреплен к подвижной траверсе 30, которая является выходным звеном привода ползуна 9, выполненного в виде поршневых цилиндров со штоками 31, которые одновременно служат направляющими 8 ползуна 9. На ползуне 9 жестко закреплен кронштейн 32, к которому шарнирно прикреплен кривошип 33 механизма поворота. Вилкообразный тоP кривошипа 33 постоянно находится в контакте с шарнирной проставкой 34, к которой щарнирно присоединен щатун 35. Второй конец шатуна также шарнирно присоединен к корпусу 10 хобота манипулятора. На ползуне 9 установлен пружинный фиксатор 36 положений корпуса 10 хобота. В центральной части кривошипа 33 консольно подвижно на оси 37 установлен ролик 38, который периодически входит в контакт с подвижным копиром 39, смонтированным на площадке 40, которая посредством шарнира 41 подвижно установлена на станине 7. На площадке 40 шарнирно закреплены ролики 42 и 43, которые размещены под соответствующим углом в горизонтальной плоскости и расположены друг от друга на определенном расстоянии в вертикальной плоскости. На ползуне 9 посредством кронщтейна 44 с возможностью установочной регулировки расположена планка 45, на которой щарнирно смонтированы рычажки 46 и 47, периодически контактирующие соответственно с роликами 42 и 43. На станине 7 закреплены неподвижно упоры 48-52 для установки рычажков 46 и 47 в требуемое положение.Манипулятор к ковочным вальцам работает следуюшим образом. Заготовка 14 на позиции загрузки заготовки и выдачи отштампованной поковки специальным устройством (на чертеже не показано) подается до упора .в торец основания 11 (фиг. 1). При этом под воздействием убирающихся упоров (на чертеже не показаны) планка 21 посредством шайбы 20, сжимая пружину 19, толкает штангу 18 с конусом 16 и ю/нусной втулкой 17 вперед, тем самым перемещает ролики 5 к оси манипулятора, а вторые концы рычагов 12 с пластинами 13 перемещаются от оси манипулятора, открывая зев для захвата заготовки 14. Как только заготовка 14 подана в захватный орган до упора в торец основания II, сразу же прекращается воздействие убирающихся уПоров на планку 21, и рычаги 12 пластинами 13 зажимают заготовку 14. Данное положение захватного органа с зажатой заготовкой в нем остается при вальцовке в заготовительном и окончательном щтампе до выброса отщтампованной поковки. После загрузки заготовки в захватный орган и надежного зажатия ее дается команда на предварительный подвод подвижных частей манипулятора с заготовкой к щтампам, при этом срабатывают штоковые полости поршневых цилиндров, размещенных в направляющих 8, и траверса 30 соверщает ход до упора в направляющие 8 (фиг. 2). Рабочие валки .1 и 2 вальцов со штампами вращаются непрерывно в автоматическом режиме в направлении, указанном стрелками. Свободный торец заготовки при этом занимает такое положение, что вращающиеся щтампы не касаются, его. При достижении положения окончательного штампа 5, 6 (фиг. 2), когда создается возможность свободного перемещения заготовки на позицию вальцовки, подается команда на освобождение штоковой полости подвижного цилиндра 26 механизма натяжения, и подвижные части манипулятора с заготовкой пружиной 27 с определенной скоростью перемещаются на позицию вальцовки в заготовительном щтампе. Заготовка 14 занимает исходное положение до контакта с ней щтампов 3 и 4 (фиг. 3). При вальцовке поковок с минимальным сопротивлением на продольный изгиб, как только штампы войдут в контакт, включается штоковая полость подвижного цилиндра 26, которая обеспечивает определенное усилие натяжения заготовки при вальцовке. При-выходе из контакта заготовительного щтампа 3, 4 с заготовкой 14 сразу же освобождается штоковая полость .подвижного цилиндра 26 и пружина 27 подает заготовку на позицию вальцовки в окончательном штампе.. При вальцовке поковок, устойчивых продольному изгибу, натяжения заготовки не производится, а штоковая и норшневая полости подвижного цилиндра 26 при этом постоянно соединены с атмосферой, и при обработке происходит только сжатие и разжатие . пружины 27, а поршневые полости цилиндров в направляющих 8 остаются включенными до конца штамповки. При подаче заготовки 14 на позицию вальцовки в заготовительном штампе пдощадка 40 с копиром 39 занимает нерабочее положение (фиг. 6), ролик 38 при этом не контактирует с копиром 39. При достижении исходного положения ползуна 9 на позиции вальцовки заготовки в заготовительном Штампе рычажки 46 и 47 соответственно контактируют с упорами 49 и 50 и занимаюфиксированное положение (фиг. 6). На соответствующем участке хода ползуна 9 и планки 45 с рычажками 46 и 47 о штампов при вальцовке заготовки в штампах 3 и4 рычажок 47 входит в контакт с роликом 43 и ставит площадку 40 с копиром 39 в рабочее положение (фиг. 7). При этом ролик 38 находится за копиром,39. При подаче заготовки 14 для вальцовки в окончательном щтампе 5 и 6 ролик 58 набегает на копир 39, поворачивает кривощип 33, а щатун 35 поворачивает корпус 10 хобота относительно ползуна 9 на 90° (фиг. 9), а вместе с ним поворачивается захватный орган с заготовкой 14 вокруг оси на 90°. При вторичном достижении ползуна 9 позиции штамповки рычажки 46 и 47 остаются в контакте с упорами 49 и 50 и снова занимают фиксированное положение (фиг. 6). В таком положении они проходят ролик 43 при вальцовке заготовки 14 в окончательном штампе и оставляют площадку 40 с копиром 39 в рабочем положении (фиг. 7) до возвращения ползуна 9 в исходное положение (фиг. 1). В этом исходном положении рычажки 46 и 47 контактируют соответственно с упорами 51 и 52 и занимают положение, показанное пунктирными линиями на фиг.. 7. При следующем ходе на позицию вальцовки в заготовительном штампе рычажок 46 контактирует с роликом 42 и ставит площадку 40 т копиром 39 в нерабочее положение (фиг. 6) до встречи ролика 38 с копиром 39. В исходное положение (фиг. 4) кривошип 33 и шатун 35 перемещаются при набегании ролика 38 на неподвижный копир, установленный на станине 7 ( на чертеже не показан) при исходном положении ползуна 9 (фиг. 1). После вальцовки заготовки в окончательном щтампе включаются порщневые полости цилиндров в направляющих 8 и штоковая полость подвижного цилиндра 26, при этом все подвижные части манипулятора с поковкой приходят в исходное положение (фиг. 1), захватный орган раскрывается, поковка сбрасывается на приемный лоток (на чертеже не показан), подается очередная заготовка в зашитный орган манипулятора, и цикл повторяется. Таким образом, предлагаемый манипу-лятор, при сравнительной простоте конструкции обеспечивает повышение производительности за счет совмещения поворота заготовки при подаче ее на вальцовку в ш,-гамп второго перехода. Манипулятор позволяет обрабатывать как устойчивые, так и неустойчивые к продольному изгибу заготовки. Формула изобретения Манипулятор к ковочным вальцам, содержащий установленный на станине с возможностью поступательного перемещения под действием выходного звена привода ползун с размещенным на нем хоботом, имеющим возможность вращения вокруг продольной оси посредством механизма поворота, механизм натяжения 3:аготовки и укрепленные на станине неподвижные упоры, отличающийся тем, что, с целью повыщения производительности и упрощения конструкции, механизм натяжения заготовки выполнен в виде укрепленного на выходном звене привода пневмоцилиндра одностороннего дей ствия с рабочей полостью, расположенной со стороны подпружиненного щтока, жест651885ко соединенного с ползуном, а механизм поворота выполнен в виде кривощипно-шатунного механизма, щатун которого щарнирно связан с хоботом, а кривощип смонтирован на ползуне с возможностью поворота под действием качающегося копира, расположенного на станине и получающего движение от размещенных на ползуне двуплечих качающихся рычагов, установленных с возможностью взаимодействия одними концами с копиром, а другими - с неподвижными упорами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство № 158780, кл. В 21 J 13/10, 1962. 2. Авторское свидетельство № 388825, кл. В 21 К 27/00, 1970. 1Э 2И и25 j;, L I-I 26 -L
Вид Б
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Манипулятор ковочных вальцов | 1977 |
|
SU698712A1 |
| Автоматическая линия для изготовления изделий с резким переходом по диаметру в поперечном сечении | 1972 |
|
SU519262A1 |
| Автоматизированная линия горячей штамповки | 1982 |
|
SU1053948A1 |
| Манипулятор к ковочным вальцам | 1984 |
|
SU1253705A1 |
| Манипулятор ковочных вальцов | 1980 |
|
SU871956A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Автоматизированная линия горячей штамповки крупных поковок с вытянутой осью | 1991 |
|
SU1822353A3 |
J9
«7
Фиг 6
X
7 7
51 52
39
U1.8
