1
Изобретение относится к обработке металлов давлением, в частности к средствам автоматизации процесса предварительного формообразования заготовок на автоматизированных ковочных вальцах в несколько проходов.
Известен манипулятор крвочных вальцов, содержащий смонтированные в направляющих станины каретки,.механизмы их поперечного и продольного перемещения с приводными, смонтированные на раме, механизм поворота, установленный на раме, и устройство для удержания заготовки 1. ..
Недостатком известного манипулятора является необоснованно большие габариты, вследствие чего много времени затрачивается на перемещение подвижных механизмов и удерживающего устройства с заготовкой.В результате этого производительность его низка. Кроме того, такая конструкция затрудняет и обслуживание агрегатируемых с последним машин-, так как затруднен свободный подход со стороны манипулятора к этим машинам.
Целью изобретения является уменьшение габаритов манипулятора и улуч шения условия обслуживания.
Поставленная цель достигается тем, что в манипуляторе ковочных вальцов, содержащем смонтированные в направляющих станины каретки, механизлвл их поперечного и продольного перемещения и приводами, смонтированные на раме, механизм поворота, установленный на раме, и устройство для удержания зАготовки, механизм поворота установлен
10 в зоне размещения механизма поперечного перемещения и выполнен с опорой | рама установлена на опоре, а каретки с приводом механизма их продольного перемещения установлены на раме.
15
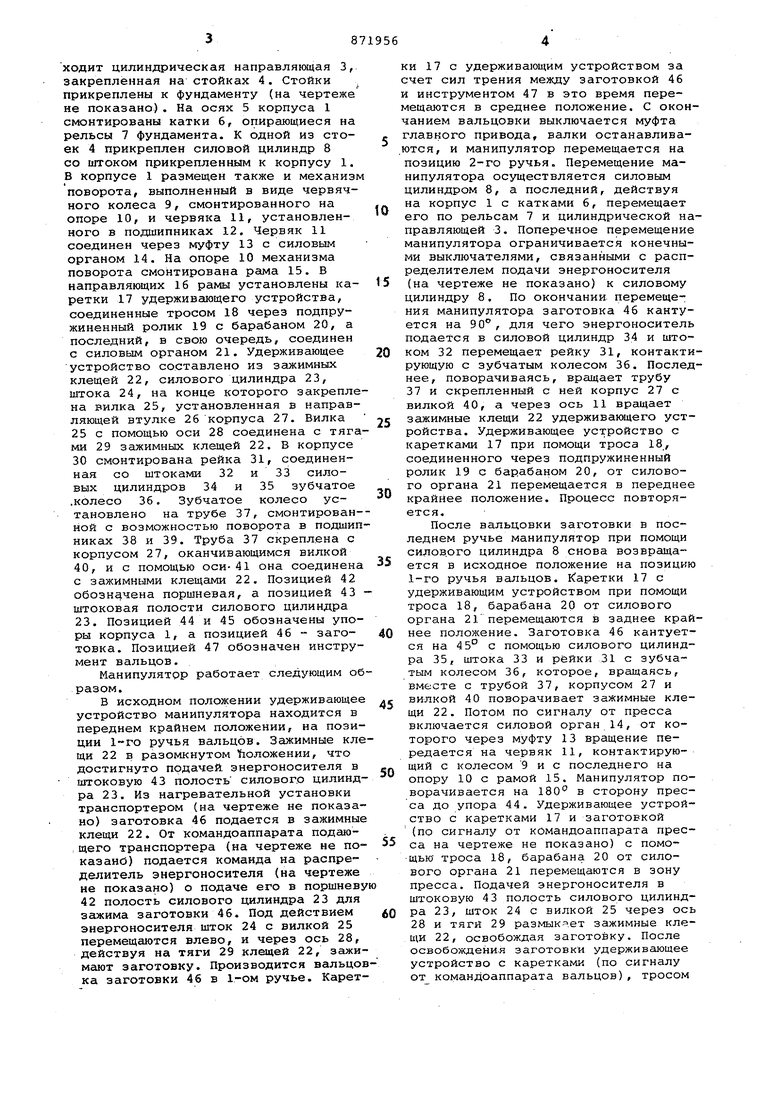
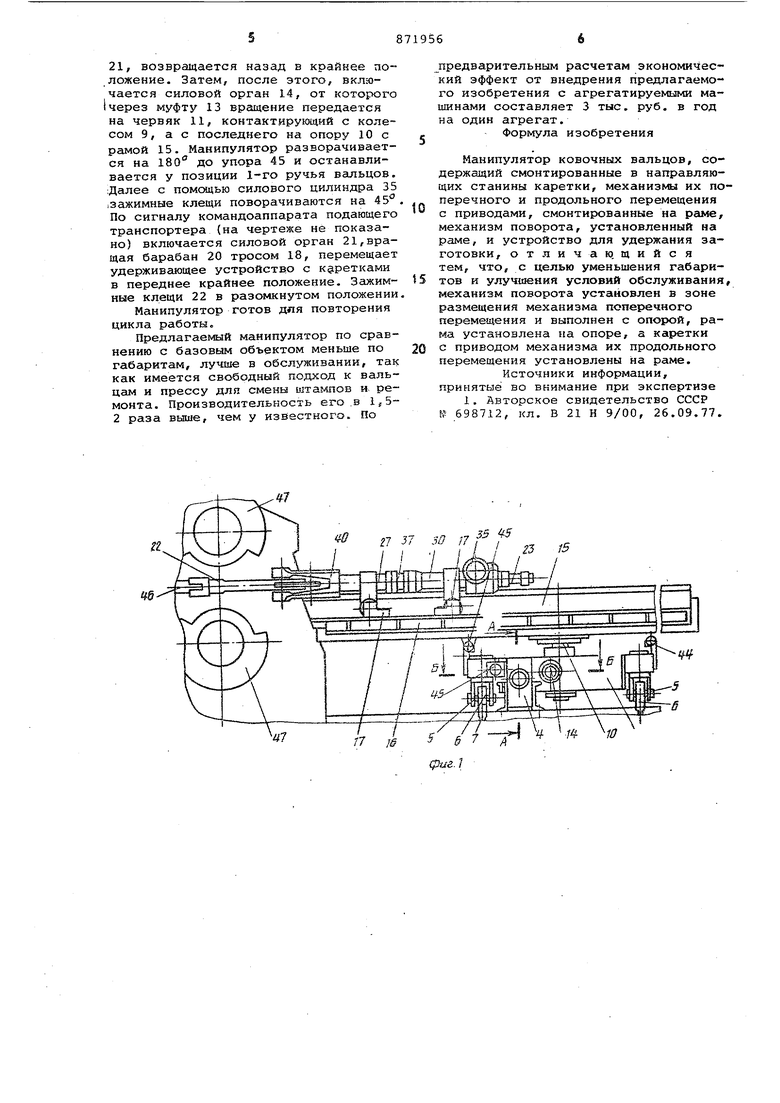
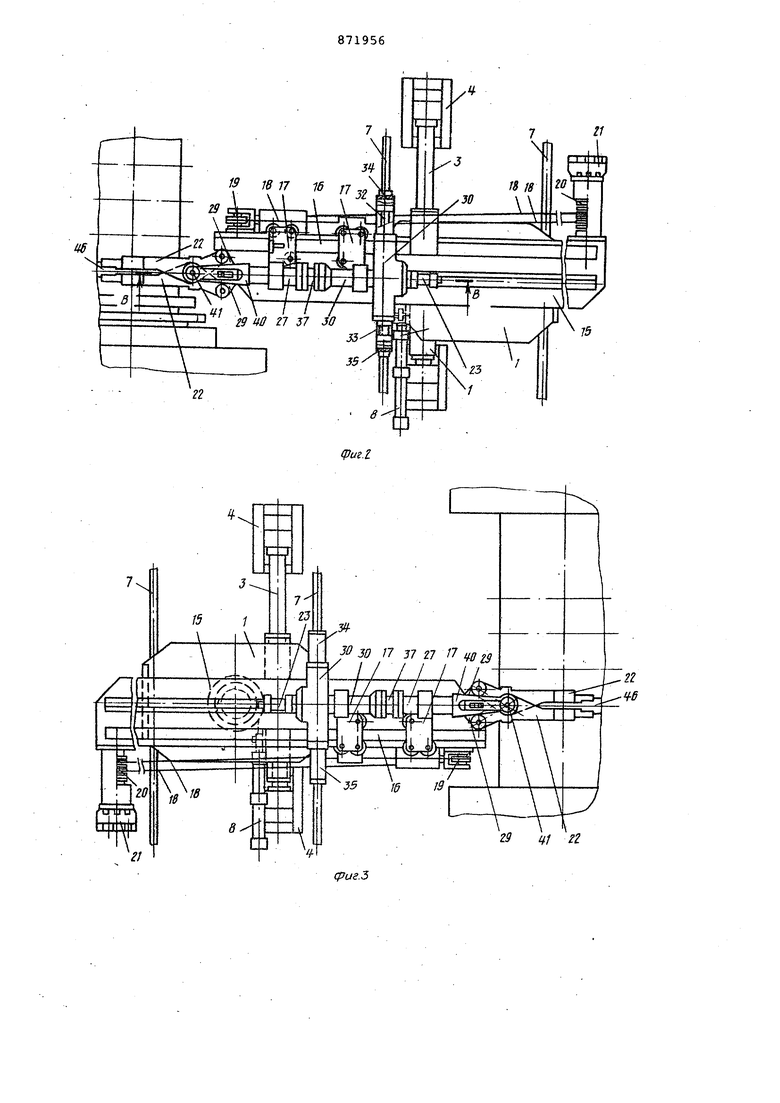
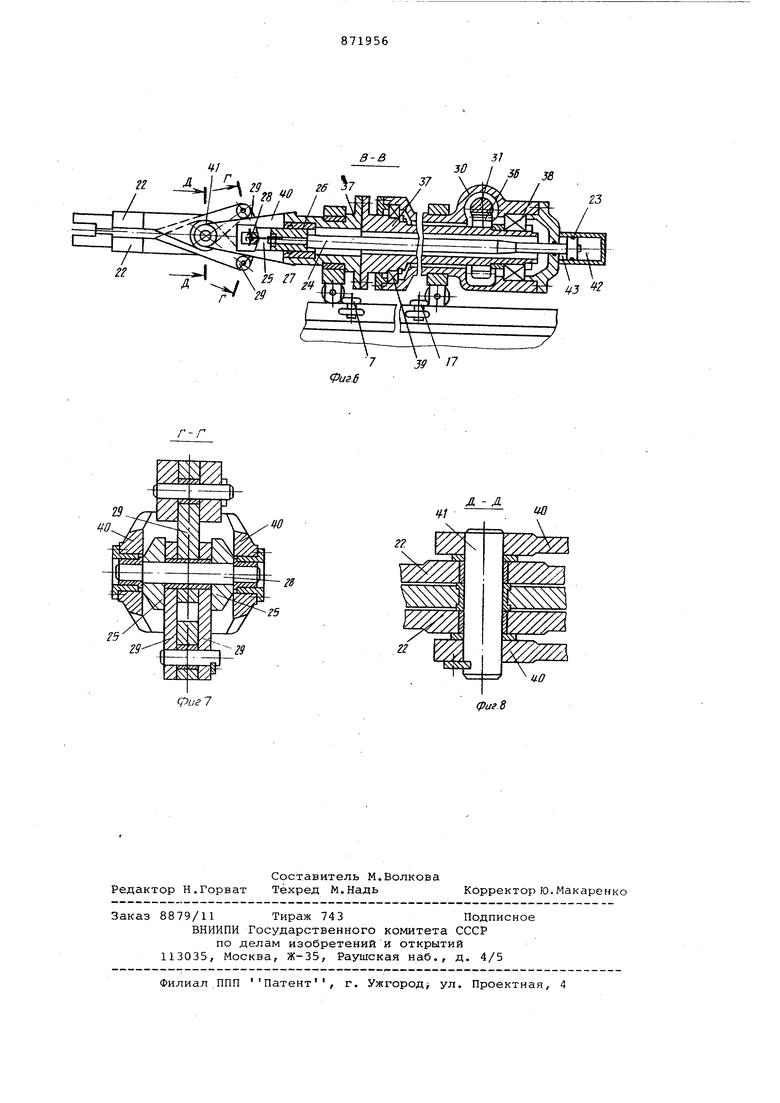
На фиг. 1 показан манипулятор,общий вид; на фиг. 2 - удерживающее устройство в ковочных вальцах/ вид в плане; на фиг. 3 - удерживающее .устройство в прессе,- на фиг. 4 20сечение А-А на фиг. 1; ца фиг. 5 сечение Б-Б на фиг. 1; на фиг. б сечение В-В на фиг. 2; на фиг. 7 - сечение Г-Г на фиг. Б на фиг. 8 - сечение Д-Д на фиг. 6.
25
Манипулятор к кЪвочным вальцам .содержит механизм поперечного перемещения, состоящий из корпуса 1, внутри которого установлены втулки 2, через которые, в свою очередь, про30
одит цилиндрическая направляющая 3, акрепленная на стойках 4. Стойки рикреплены к фундаменту (на чертеже е показано). На осях 5 корпуса 1 монтированы катки б, опирающиеся на ельсы 7 фундамента. К одной из сток 4 прикреплен силовой цилиндр 8 о штоком прикрепленным к корпусу 1. корпусе 1 размещен также и механизм поворота, выполненный в виде червячного колеса 9, смонтированного на поре 10, и червяка 11, установленного в подшипниках 12. Червяк 11 соединен через муфту 13 с силовым органом 14. На опоре 10 механизма поворота смонтирована рама 15. В направляющих 16 рамы установлены каретки 17 удерживающего устройства, соединенные тросом 18 через подпружиненный ролик 19 с барабаном 20, а последний, в свою очередь, соединен с силовЕдм органом 21. Удерживающее устройство составлено из зажимных клещей 22, силового цилиндра 23, штока 24, на конце которого закреплена вилка 25, установленная в направляющей втулке 26 корпуса 27. Вилка 25 с помощью оси 28 соединена с тягами 29 зажимных клещей 22. В корпусе 30 смонтирована рейка 31, соединенная со штоками 32 и 33 силовых цилиндров 34 и 35 зубчатое .колесо 36. Зубчатое колесо установлено на трубе 37, смонтирован-ной с возможностью поворота в подшипниках 38 и 39. Труба 37 скреплена с корпусом 27, оканчивающимся вилкой 40, и с помощью оси-41 она соединена с зажимными клещами 22. Позицией 42 обозначена поршневая, а позицией 43 - штоковая полости силового цилиндра 23. Позицией 44 и 45 обозначены упоры корпуса 1, а позицией 46 заготовка. Позицией 47 обозначен инструмент вальцов.
Манипулятор работает следующим образом.
В исходном положении удерживающее устройство манипулятора находится в переднем крайнем положении, на позиции ручья вальцов. Зажимные клещи 22 в разомкнутом Ьоложении, что достигнуто прдачей энергоносителя в штоковую 43 полость силового цилиндра 23. Из нагревательной установки транспортером (на чертеже не показано) заготовка 46 подается в зажимные клещи 22. От командоаппарата подаю:щего транспортера (на чертеже не показано) подается команда на распределитель энергоносителя (на чертеже не показано) о подаче его в поршневую 42 полость силового цилиндра 23 для зажима заготовки 46. Под действием энергоносителя шток 24 с вилкой 25 перемещаются влево, и через ось 28, действуя на тяги 29 клещей 22, зажимают заготовку. Производится вальцовка заготовки 46 в 1-ом ручье. Каретки 17 с удерживающим устройством за счет сил трения между заготовкой 46 и инструментом 47 в это время перемещсштся в среднее положение. С окончанием вальцовки выключается муфта главного привода, валки останавлива.ются, и манипулятор перемещается на позицию 2-го ручья. Перемещение манипулятора осуществляется силовым цилиндром 8, а последний, действуя на корпус 1 с катками 6, перемещает его по рельсам 7 и цилиндрической направляющей 3. Поперечное перемещение манипулятора ограничивается конечными выключателями, связанными с распределителем подачи энергоносителя (на чертеже не показано) к силовому цилиндру 8. По окончании перемещения манипулятора заготовка 46 кантуется на 90, для чего энергоноситель подается в силовой цилиндр 34 и штоком 32 перемещает рейку 31, контактирующую с зубчатым колесом 36. Последнее, поворачиваясь, вращает трубу 37 и скрепленный с ней корпус 27 с вилкой 40, а через ось 11 вращает зажимные клещи 22 удерживакицего устройства. Удерживающее устройство с каретками 17 при помощи троса 18, соединенного через подпружиненный ролик 19 с барабаном 20, от силового органа 21 перемещается в переднее крайнее положение. Процесс повторяется.
После вальцовки заготовки в последнем ручье манипулятор при помощи силов.ого цилиндра 8 снова возвращается в исходное положение на позицию 1-го ручья вальцов. Каретки 17 с удерживающим устройством при помощи троса 18, барабана 20 от силового органа 21 перемещаются в заднее крайнее положение. Заготовка 46 кантуется на 45° с помощью силового цилиндра 35, штока 33 и рейки 31 с зубчатым колесом 36, которое, вращаясь, вместе с трубой 37, корпусом 27 и вилкой 40 поворачивает зажимные клещи 22. Потом по сигналу от пресса включается силовой орган 14, от которого через муфту 13 вращение передается на червяк 11, контактирующий с колесом 9 и с последнего на опору 10 с рамой 15. Манипулятор поворачивается на 180° в сторону пресса до упора 44. Удерживающее устройство с каретками 17 и заготовкой (по сигналу от командоаппарата пресса на чертеже не показано) с помощью троса 18, барабана 20 от силового органа 21 перемещаются в зону пресса. Подачей энергоносителя в штоковую 43 полость силового цилиндра 23, шток 24 с вилкой 25 через ось 28 и тяги 29 размык.ет зажимные клещи 22, освобождая заготобку. После освобождения заготовки удерживающее устройство с каретками (по сигналу от командоаппарата вальцов), тросом
21, возвращается назад в крайнее положение. Затем, после этого, включается силовой орган 14, от которого (через муфту 13 вращение передается на червяк 11, контактирующий с колесом 9, а с последнего на опору 10 с рамой 15. Манипулятор разворачивается на 180° до упора 45 и останавливается у позиции 1-го ручья вальцов. Далее с помощью силового цилиндра 35 1эажимные клещи поворачиваются на 45 По сигналу командоаппарата подающего транспортера (на чертеже не показано) включается силовой орган 21,вращая барабан 20 тросом 18, перемещает удерживающее устройство с каретками в переднее крайнее положение. Зажимные клещи 22 в разомкнутом положении
Манипулятор готов для повторения цикла работы.
Предлагаемый манипулятор по сравнению с базовым объектом меньше по габаритам, лучше в обслуживании, так как имеется свободный подход к вальцам и прессу для смены и. ремонта. Производительность его .в 1,52 раза выше, чем у известного. По
предварительным расчетам экономический эффект от внедрения предлагаемого изобретения с агрегатируемыми машинс1ми составляет 3 тыс. руб. в год на один агрегат.
Формула изобретения
Манипулятор ковочных вальцов, содержащий смонтированные в направляющих станины каретки, механизмы их поперечного и продольного перемещения
0 с приводами, смонтированные на раме, механизм поворота, установленный на раме, и устройство для удержания заготовки, отличающийся тем, что, с целью уменьшения габари5тов и улучшения условий обслуживания, механизм поворота установлен в зоне размещения механизма поперечного перемещения и выполнен с опорой, рама установлена на опоре, а карпетки
0 с приводом механизма их продольного перемещения установлены на раме.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 698712, кл. В 21 Н 9/00, 26.09.77.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор ковочных вальцов | 1980 |
|
SU935189A1 |
| Манипулятор | 1989 |
|
SU1796335A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Привод продольного и поперечного перемещения клещей ковочных вальцов | 1986 |
|
SU1430163A1 |
| Манипулятор ковочных вальцов | 1990 |
|
SU1756012A1 |
| Манипулятор ковочных вальцов | 1977 |
|
SU698712A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |
| Автоматизированная линия горячей штамповки крупных поковок с вытянутой осью | 1991 |
|
SU1822353A3 |
| МАНИПУЛЯТОР | 1965 |
|
SU175803A1 |
| Манипулятор к ковочным вальцам | 1984 |
|
SU1253705A1 |
г 1
б- б
/
(pas.5
7 39 П
Л - Л
НО
