Изобретение относится к обработке металлов давлением и, в частности, к средствам автоматизации процесса предварительного формообразования заготовок на ковочных вальцах в два и более проходов.
Известен манипулятор ковочных вальцов, содержащий корпус, в неподвижных направляющих которого смонтирована каретка с подвижными направляющими, несущими зажимы с роликами, опирающимися на подвижные направляющие, кинематически связанные с профильными кулачками 1.
Основным недостатком такого манипулятора является то, что прокатанная заготовка за инструментом висит консольно и имеет возможность изгибаться под собственным весом, что является больщим препятствием к использованию такого манипулятора при прокатке длинномерных изделий.
Известен манипулятор ковочных вальцов, содержащий смонтированную в направляющих станины каретку, механизм перемещения каретки вдоль оси рабочих валков
с приводом, устройство для удержания заготовки, установленное на каретке 2.
Недостатком манипулятора является то, что заготовка при прокатке с использованием такого манипулятора всегда находится в вертикальном положении, вс.тедствие чего и изгибания ее исключается. Но такой манипулятор малоудобен в обслуживании.
Целью изобретения является расширение технологических возможностей.
Для достижения цели манипулятор ко вочных вальцов снабжен второй кареткой, установленной в направляюш,их станины и связанной с первой кареткой, и вторым устройством для удержания заготовки, установленным на второй каретке, обе каретки установлены с возможностью перемещения перпендикулярно осям рабочих валков. Связь кареток выполнена в виде силового цилиндра и тяг.
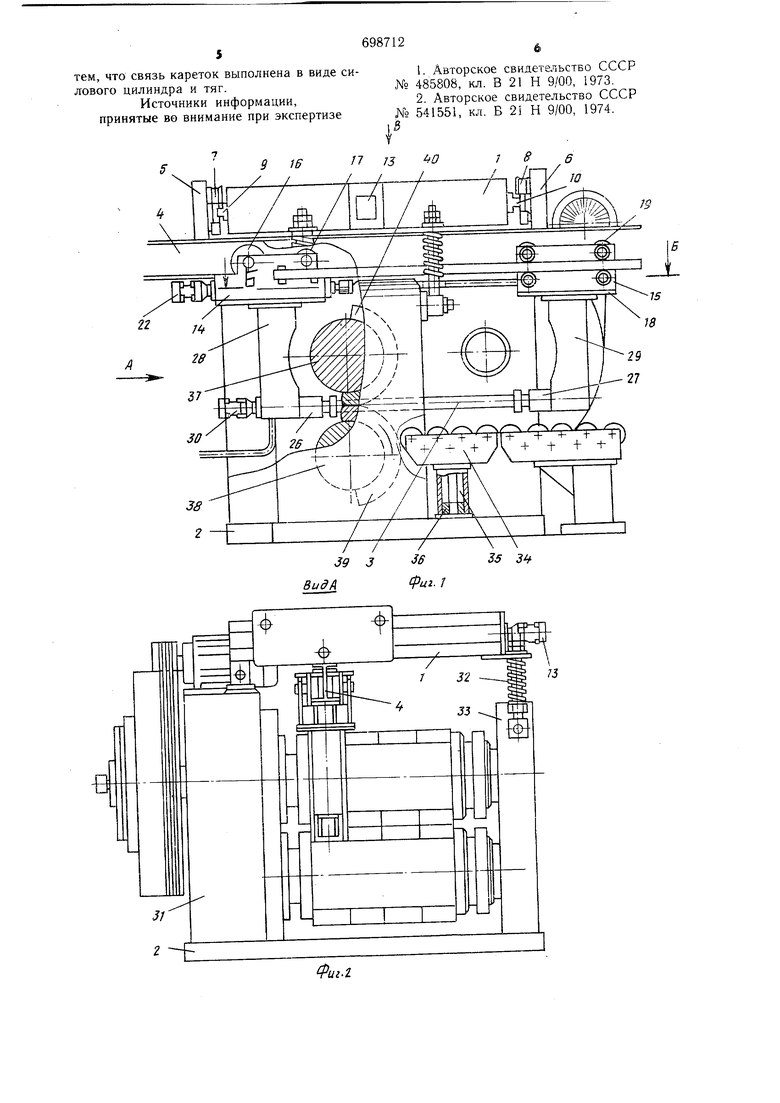
На фиг. 1 изображен манипулятор ковочных вальцов, вид спереди; на фиг. 2 -
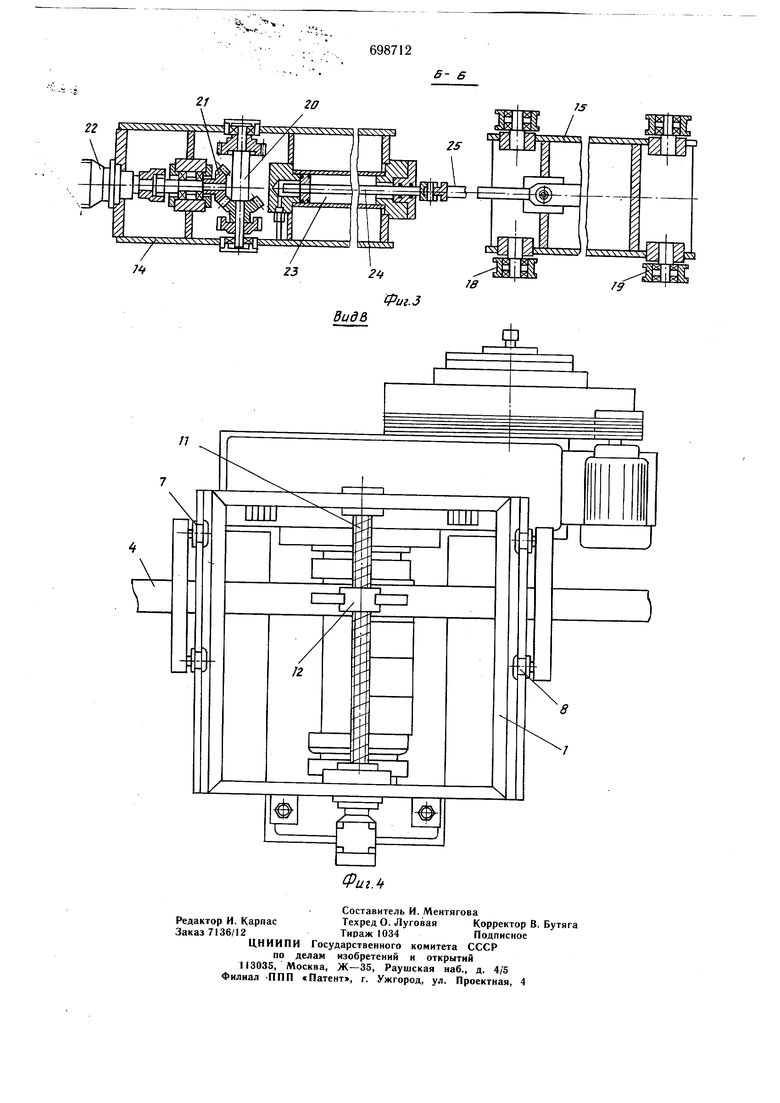
0 вид по стрелке А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - вид по стрелке В на фиг. 1 с частичным разрезом. Рама маниггулятора установлена на станине 2 ковочных вальцов. На раме смонтировань механизмы продольного и ноперечносо перемещегшй, удерживающее заготовку 3 устройство. Механизм перемещения манипулятора вдоль оси рабочих валков включает направляющую балку 4, соединенную с опорами 5 и 6, ролики 7 и 8, которые установлены с возможностью перемещения но направляющим 9 и 10 рамы, а направляющая балка 4 при этом через винтовую пару - винт 11 и гайку 12 - кинематически связана с приводом 13, выполненным, в частности, в форме гидродвигателя. Механизм перемещения манипулятора перпендикулярно оси рабочих валков содержит каретки 14, 15, установленные своими катками 16, 17; 18 и 19 на направляющей балке 4, ось 20 каретки 14 через коническую зубчатую пару 21 при этом кинематически связана с гядродвигателем 22, а сама каретка 14 с помощью встроенного в нее силового цилиндра 23 через шток 24 и тягу 25 связана с кареткой 15. Устройство для удержания заготовки выполнено в форме подвижных центров 26 и 27 установленных в кронштейнах 28 и 29, закрепленных в каретках 14 и 5. При этом центр 26 связан с дополнительным гидродвигателем 30. Рама 1 одной стороной установлена на задней стойке 31 станины 2, а второй стороной через пружины 32 а.мортизируюшего устройства опирается на переднюю стойку 33 этой станины. Под подвижными центрами 26 и 27 автономно установлен рольганг, одна часть 34 I которого (на участке :л.жду подвижными центрами) смонтирована подвижно на штоке 35 силового цилиндра 36. Работает манипулятор следующ.чм образом.
В исходное положении подвижные центры 26 и 27 находятся перед первым ручьем щтампа рабочих валков на линии оси вальцовки, а часть рольГанга 32 находится ка уровне подач-и заготовки средствами механизации (на тертеже не показано). Поступившая на рольганг заготовка 3 подъемом части рольганга 34 устанавливается на линию оси вальцовки. Подачей энергокосителя в штоковую полость силового цил.индра заготовка зажимается в подвижных центрах 26 и 27. Затем включаются зо вращение рабочие валки 37 и 38, и заготовка з зажатом состоянии совместно с каретками 14 и 15 перемещается влево до выхода секторов 39 и 40 штампа из заготовки 3.
При этом перемещение каретки 14 будет по величине больше, чем перемещение каретки 15 на величину удлинения заготовки после прохода первого ручья. После зычто исключает попадание в них отходов и
окалины.
Формула изобретения
. Манипулятор ковочных вальцов, содержащий смонтированную в направляющих станины каретку, механизм перемещения каретки вдоль оси рабочих валков с приводом, устройство для удержания заготовки, установленное на каретке, отличающийся тем, что, с целью расщиреиия технологических возможностей, он снабжен второй кареткой, установ;1енной в направляющих станины и связанной с первой кареткой, и вторым устройством для удержания заготовки, установленным на второй каретке, обе каретки установлены с возможностью перемещения перпендикулярно осям рабочих валков.
2. Манипулятор по п. 1, отличающийся хода секторов штампа из заготовки включается гидродвигатель 22, который через зубчатую коническую пару - винт 11 и гайку 12 - передает вращение на катки 16 и 17 каретки 14. Каретки 14 и 15 совместно с зажатой в центрах заготовкой перемещаются вправо до исходного положения для начала вальцовки. При этом заготовка включением привода 13 и через винтовую пару 11, 12 за счет перемещения направляющей балки 15 перемещается на второй ручей шта.мпа рабочих валков (на фиг. 2 вправо), а подвижные центры 14 и 15 совместно с зажлтой в них заготовкой гидродвигателем 30 поворачивается на угол, установленный технологическим процессом, и процесс вальцовки повторяется вплоть до последнего ручья штампа. При прс.ходе последнего ручья после возврата ее в исходное положение, подачей энергоносителя в поршневую полость силового цилиндра каретка 15 перемещается вправо на величину чуть больше длины отвальцованной заготовки. Заготовка освобождается из центров и удаляется средствами механизации (на чертеже не показано). После удаления отвальгдованной заготовки лриводо.м 13 через винтовую пару 11, 12 вся система поперечного перемещения, включающая центры каретки и направляющую балку, перемеилается на уровень первого ручья штампа к процесс подачи, перемещения и вальцовки заготовки повторяется в опксангюй выше последовательности. Манипулятор хорошо агрегатируется со всеми известными конструкциями ковочных альцов, а габариты и вес его на 30-40/о меньше известных подающих устройств, более удобен в эксплуатации, повышена его надежность за счет расположения подвижных элементов над линией оси вальцовки, тем, что связь кареток выполнена в виде силового цилиндра и тяг. Источники информации, принятые во внимание при экспертизе
ВидА
г -№№
Фиг.1 1.Авторское свидетельстБО СССР 485808, кл. В 21 Н 9/00, 1973. 2.Авторское свидетельство СССР 541551, кл. В 21 Н 9/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор ковочных вальцов | 1990 |
|
SU1756012A1 |
| Манипулятор ковочных вальцов | 1980 |
|
SU935189A1 |
| Привод продольного и поперечного перемещения клещей ковочных вальцов | 1986 |
|
SU1430163A1 |
| Манипулятор | 1989 |
|
SU1796335A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Манипулятор к ковочным вальцам | 1984 |
|
SU1253705A1 |
| Манипулятор ковочных вальцов | 1980 |
|
SU871956A1 |
| Автоматические ковочные вальцы | 1974 |
|
SU541551A1 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ ГОРЯЧЕЙ ШТАМПОВКИ КРУПНЫХ ПОКОВОК С ВЫТЯНУТОЙ ОСЬЮ | 2003 |
|
RU2262436C2 |