в настоящее время путеив.мерители отечественных дорог фиксируют состояние пути по уровню с noiмощыо -мехаиизма, управляемого лгаятниколг. ;
OciHOBHbiM недостаткоЛЕ такого механизма является искажение показаиий при проходе по кривым, так :ка« центробежная сила отклоняет iMaiHTiH; Ki Ьт щертикальиого положения в иаклонное. Откло«ение MaHTiHH Ka завиюит от акорости, с которой фиксируется состояние пути, и радиуса -кри-вой.
При тп ательной отметке скоростей И |ргдиусов| 1кривых, путем внесения no.npaiBOK В пока эания .механив-ма, можно приблизиться к нстинному состоянию пути, но такая обработка требует много времени и не дает наглядности (в моМВнт прохода кривой.
Предлагаемый маятник исключает вл1ияни е действия цент1робеж«ой силы на его отклоиение, тем самым лиК1вид1ирует )вы шеукаВа:Н1Ные недостатки 0|быч«ого маятиика путеивмерителя и имеет ту о собанность, что, с целью исключения влияния на него центробежной силы, возникалощей три движении путеизмери-. теля, IHO кривой, он снабжен направленнойвверх рамкой и паворотно монти0015акной на оси его качания
массой, расположенной над этой осью и связанной с рамкой посредством пружин, стремящихся удерживать центр тяжести массы на вертикали, проходящей через ось ее качания.
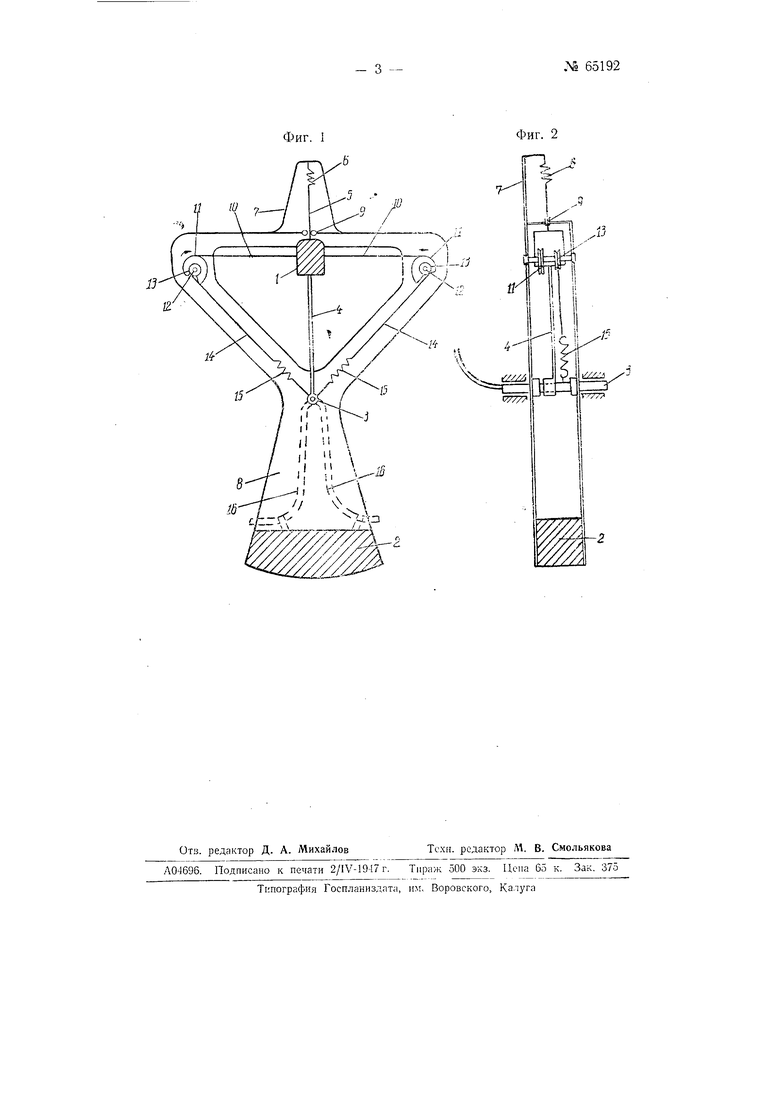
На чертеже фиг. 1 изображает вид спереди примерной формы выполнения маятника, а фиг. 2-разрез маятника по фи.г. 1.
Майтник 8 подвещен на ocJt о, на которой с помощью вертикальной щтанги 4 поворотно монтирована масса /. В; вертикальном положении штанга удерживается 5 и пружиной 6, которая прикреп лена к направленной вверх рамке 7, составляющей одно целое С маятником 8. Нить 5 пропущена межд натравляющими роли-ками 9 рамкн 7.
Кроме того штанга 4 связана с массой } гибкими нитяМи 10 с улиткообразными блочкам и //, симметpH4iHo расположенными на рамке 7 по обе стороны верти1кальной плоскости силитетрии маятника. Блочки 11 закреплены на осях 12 ВМестс с цилиндрическими блоками 13. От блоков 13 идут гибкие нити 14 к пружинам 15. которые закреплены на (оси 3.
ПрИ проходе путеизмерителя по кривой центробежная сила вызывает отклонение LMaccbi 1 вд ее штанги 4
от 1верт И)кали и тем самым П1реп1ятствует ошкломению в ту, же сторону массы 2 маятника.
BMielcTo нВтей 14 сможет быть исполь 3 ована гидравлическая система. В этом случае ось 5 выполняется полой, а штанга 4 снабжается запорным opra«OLM, например, краном или клапаном, контролирующим подачу ЖИДКОСТИ черев ось 3. Жидкость подводится через заиорный орган И ось 3 .в одну из двух монтированных на маятнике 5 трубок 16, концы которых отогнуты в ПЛОСКОСТИ) качания маятника в Противоположные стороны. Жидкость пОСтупает в полую ось 3 под давлением. При отклонении массы / в сторону, запорный оргаи открывает проход ж:йдKotTH IB трубку 16 с той же стороны. Истечение -жидкости из трубки создает реа1ктивное действие, удерживающее массу 5 от отклонения.
П р е д -м е т Н з о б р е т с и и я
1. Маятник для путеивме рйтеля, отличающийся тем, что, с целью исключения влияния на него цемтробежиой сильг, возникающей при движении путейэмерителя по кривой, он снабжен напр авлениой аверх рамкой 7 и поворотно монтированной на оси 3 его качания маосой /, расположенной мад этой
осью и овязанной с радгкой посредством пружин, стремящихся удерживать .центр тяжести массы на (вертикали, проходящей через ось ее качания.
2.Форма выполнения маятника по п. 1, отличающаяся тем, что LMaicca. / связана ic рамкой; 7 посредством пружины 6 и верти«алЬ иой нити 5, пропущенной направляющими- ролика:ми 9.
3.Маятни1К по п. п. 1-2, отличающийся тем, что масса / связана посредством нитей 10 с литкообразньрми блочками //, симмет рично раоположенными на paMiKe 7 по обе стороны вартикалвной плоскости симметрии маятника и жестко соединенньрми с блоками /5, с которыми связаны тюсредстюм JIHTCH 14 пружины 15, другим кондом укрепленные на оси 3.
4.Маятник по п. л. 1-2. о т л ича1ющийся тем, что масса / связана с заПорныМ: органом на гюлой оСи 5, контролирующим подачу жид-кости через эту ось под жиюром IB ту или другую из двух трубок 16, концы которых загнуты в плоскости 1КаЧан1Ия маятника ;е противоположные стороны, с целью соадаиия ipeaiKTHBHoro действии па маятник при (воздействии на него центробежной силы. Фиг. I

| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОПИЧЕСКИЙ КОМПАС | 1932 |
|
SU38554A1 |
| Приспособление для автоматической смазки рельсов на криволинейных участках пути | 1930 |
|
SU21229A1 |
| ПРИБОР ДЛЯ АВТОМАТИЧЕСКОГО НИВЕЛЛИРОВАНИЯ | 1927 |
|
SU6856A1 |
| Установка для определения динамической неуравновешенности и балансировки веретен прядильных и крутильных машин | 1958 |
|
SU116972A1 |
| Железнодорожный путеизмеритель | 1939 |
|
SU59481A1 |
| Автоматический прибор для съемки плана и профиля пройденного пути | 1933 |
|
SU42702A1 |
| ВЕРТИКАЛЬНЫЙ ВЕТРЯНОЙ ДВИГАТЕЛЬ | 1925 |
|
SU3203A1 |
| Передача с автоматическим изменением передаточного отношения | 1928 |
|
SU47983A1 |
| Прибор для демонстрации суточного вращения земли | 1946 |
|
SU71058A1 |
| Клещи для метки животных | 1930 |
|
SU20397A1 |