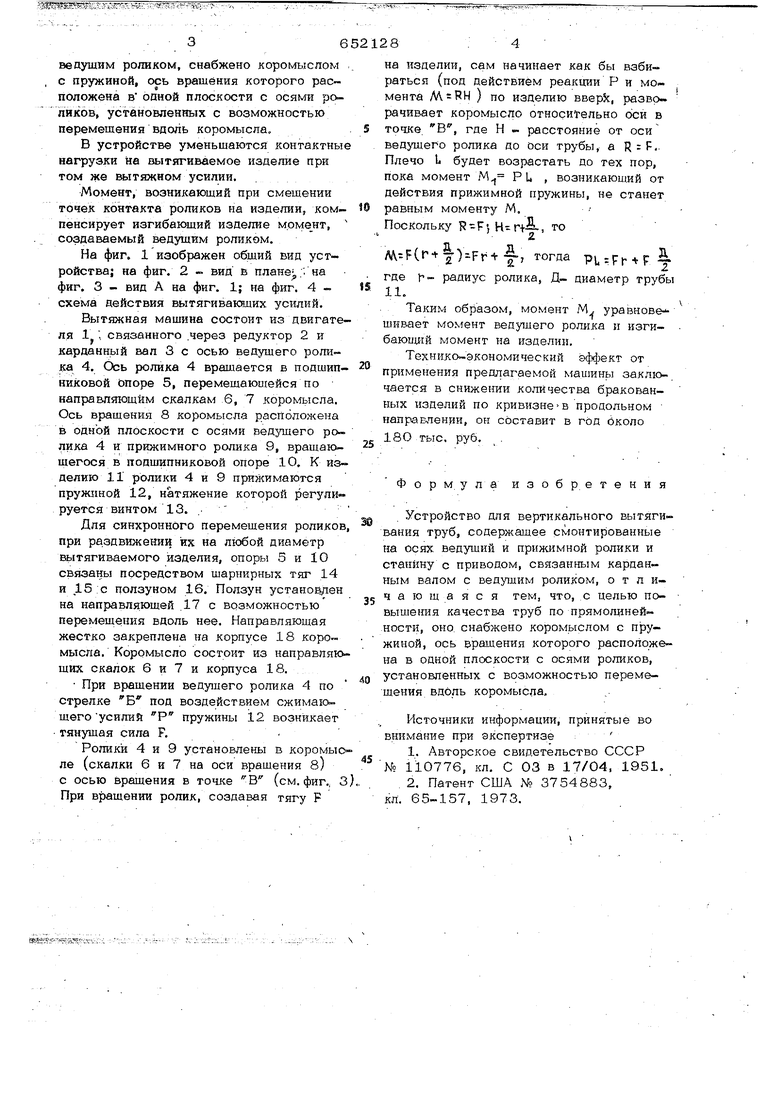
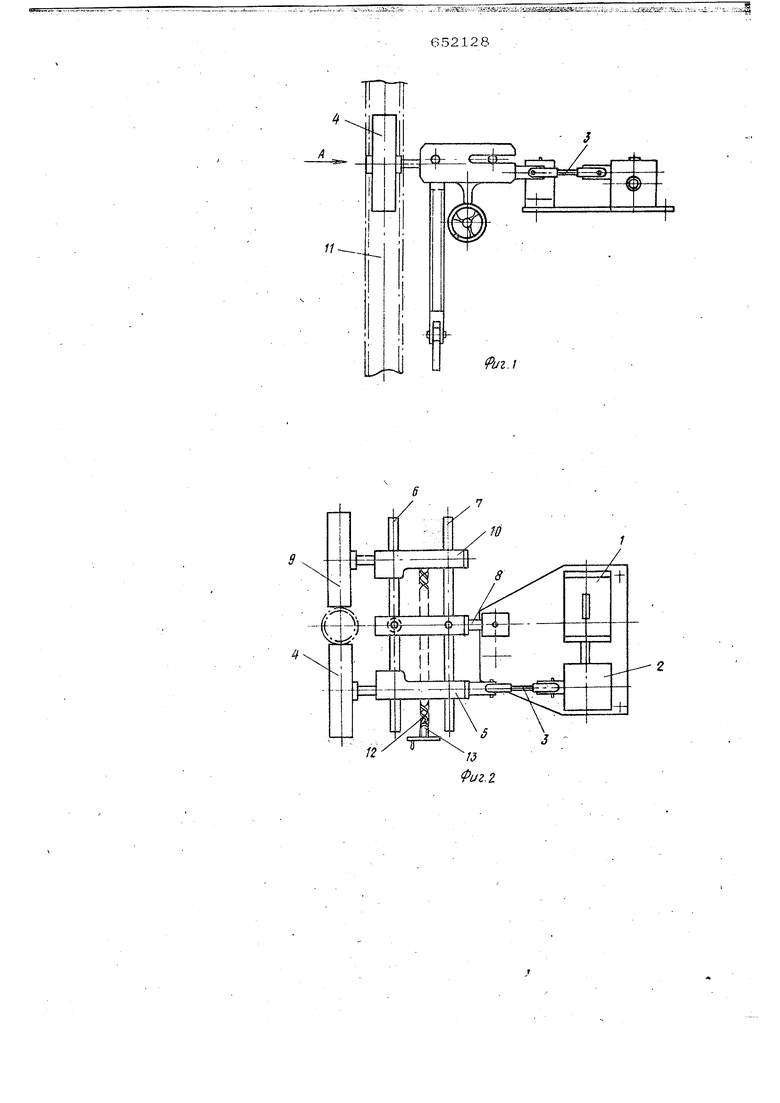
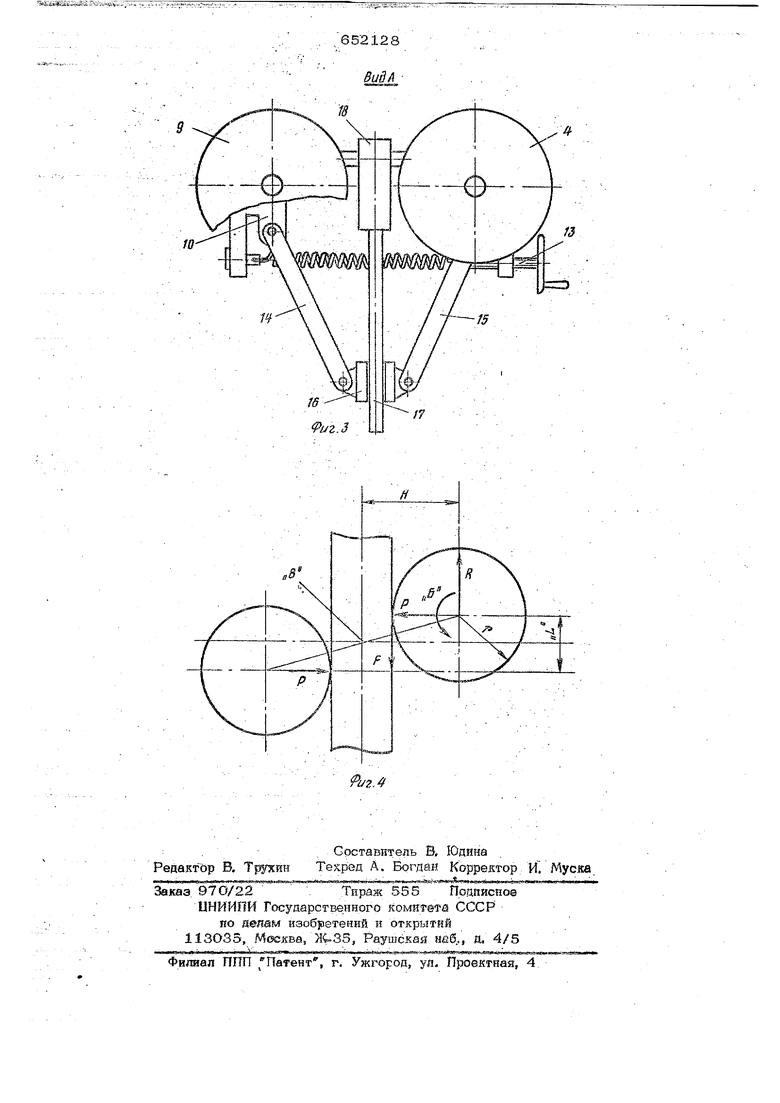
(54) УСТРОЙСТВО ДЛЯ ВЕРТИКАЛЬНОГО Иэ1ТЯШВАНИЯ ТРУ6 ведущим роликом, снабжено коромыслом с пружиной, ось врашёния которого расположена в оаной плоскости с осями роликов, установленных с возможностью перемещения вдоль коромысла, В устройстве уменьшаются контактны нагрузки на вытягиваемое изделие при том же вытяжном усилии. Момент, возникающий при смешении точек контакта роликов на изделии, компенсирует изгибающий изделие , создаваемый ведущим роликом. На фиг. 1 изображен общий вид уст ройства; на фиг. 2 вид в планер; на фиг. 3 - вид А на фиг. 1; на фиг. 4 схема действия вытягивающих усилий. Вытяжная машина состоит из двигате ля 1 ; связанного .через редуктор 2 и карданный вал 3 с осью ведущего ролика 4. Ось ролика 4 вращается в подщип никовой Ьпоре 5, перемещающейся по направляющим скалкам .6, 7 коромысла. Ось вращения 8 коромысла расположена в одной плоскости с осями ведущего ролика 4 и прижимного ролика 9, вращающегося в подшипниковой опоре 10. К из делию 11 ролики 4 и 9 прижимаются пружиной 12, натяжение которой регули руется винтом 13. .. Для синхронного перемещения ролико при раздвижении их на любой диаметр щ 1тягиваемого изделия, опоры 5 и 10 связаны посредством щарнирных тш- 14 и 15с ползуном 16. Ползун установлен на направляющей .17 с возможностью перемещ;ения вдоль нее. Направляющая жестко закреплена на корпусе 18 коро мысла. Коромысло состоит из направляю щих скалок 6 и 7 и корпуса 18. При вращении ведущего ролика 4 по стрелке Б под воздействием сжимающегоусилий Р пружины 12 возникает тянущая сила F.. Ролики 4 и 9 установлены в коромы ле (скалки 6 и 7 на оси вращения в) с осью вращения в точке В (см. фиг., При вращении ролик, создавая тягу F на изделии, сам начинает как бы взбираться (под действием реакции Р и момента M RH ) по изделию Бвер5с, разворачивает коромысло относительно оси в точке , где Н - расстояние от оси ведущего ролика до оси трубы, а R : F.. Плечо L будет возрастать до тех пор, пока момент М Р U , возникающий от действия прижимной пружины, не станет равным моменту М. Поскольку R-F, ., то M-F( )zFr 2 /-ГГ-Г тогда радиус ролика, Д- диаметр трубы Таким образом, момент М . уравновещквает момент ведущего ролика и изги- баюихий момент на изделии. Технико-экономический Si xljeKT от применения предлагаемой машинь заключается в снижении количества бракованных изделий по кривизне-в продольном напраЕлении, он составит в год бколо 18О тыс. руб. Форм, ула изобр. етения Устройство для вертикального вытягивания труб, содержа1дее смонтированные на осях ведущий и прижимной ролики и станину с приводом, связанным карданным валом с ведущим роликом, отличающаяся тем, что, .с целью повыщения качества труб по прямощ ней.ности, оно. снабжено коромыслом с пружиной, ось вращения которого расположена в одной плоскости с осями роликов, установленных с возможностью перемещения вдоль коромысла. Источники информации, принятые во внимание при экспертизе : 1. Авторское свидетельство СССР № 110776, кл. С 03 в 17/04, 1951. . 2. Патент США № 3754883, кл. 65-157, 1973.
fui.i
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ ПОЛОСОВОГО ШПОНА | 1995 |
|
RU2064862C1 |
| Автомат Афанасьева для мерной резки и обработки торцов проката | 1985 |
|
SU1289611A1 |
| Прибор для измерения кривизны буровых скважин | 1975 |
|
SU699164A1 |
| Автомат для сварки под слоем флюса | 1984 |
|
SU1146168A1 |
| Устройство для вытягивания труб из стекла | 1987 |
|
SU1430371A1 |
| Устройство для вытягивания стеклянных изделий | 1981 |
|
SU992436A1 |
| Станок для сборки трубчатых секций теплообменников | 1977 |
|
SU656707A1 |
| Вертикальный кривошипный пресс-автомат | 1986 |
|
SU1333599A1 |
| ШТАМП ДЛЯ ВЫТЯЖКИ НА МНОГОПОЗИЦИОННОМ ПРЕССЕ-АВТОМАТЕ | 1994 |
|
RU2077402C1 |
| Устройство для подборки сейсмических кос | 1983 |
|
SU1163291A1 |
W
.fi
