(54) УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ НАПРАВЛЕННЫХ СКВАЖИН СЛОЖНЫХ ТРАЕКТОРИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для проведения направленных скважин | 1974 |
|
SU484298A1 |
| Агрегат для проведения направленных скважин сложных траекторий с программным управлением движением рабочего органа | 1974 |
|
SU615190A1 |
| УСТРОЙСТВО для НАПРАВЛЕННОГО БУРЕНИЯ СКВАЖИН | 1972 |
|
SU356338A1 |
| Исполнительный орган одношпиндельной шнекобуровой машины | 1969 |
|
SU582386A1 |
| Рабочий орган одношпиндельной шнекобуровой машины | 1977 |
|
SU699165A1 |
| СИСТЕМА ДЛЯ ОРИЕНТАЦИИ УСТРОЙСТВ НАПРАВЛЕННОГО БУРЕНИЯ ГОРИЗОНТАЛЬНЫХ И СИЛЬНОНАКЛОНЕННЫХ СКВАЖИН | 1991 |
|
RU2015316C1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ИЗДЕЛИЙ РАЗЛИЧНОЙ ФОРМЫ ПРИ ИХ ТРАНСПОРТИРОВАНИИ ИМ. Л.П.ПЕТРЕНКО-ВЕРСИЯ I | 2000 |
|
RU2201388C2 |
| Устройство для направленного бурения скважин | 1973 |
|
SU451845A1 |
| СПОСОБ ОРИЕНТИРОВАНИЯ ИЗДЕЛИЙ РАЗЛИЧНОЙ ФОРМЫ ПРИ ИХ ТРАНСПОРТИРОВАНИИ ИМ.Л.П.ПЕТРЕНКО - ВЕРСИЯ V | 2001 |
|
RU2203211C1 |
| СПОСОБ БУРЕНИЯ ПРЯМОЛИНЕЙНЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2113588C1 |
Изобретение относится к горному делу и может быть использовано в горнорудной промышленности и туннельном строительстве.
Известно устройство для проведения направленных скважин сложных траекторий, включающее пневмобур, центрирующий фонарь, трубчатый невращающийся буровой став, механизмы подачи пневмобура, принудительного управления, автоматической стабилизации прямолинейного направления и механизм закругления траектории скважины 1.
Существенными недостатками данного устройства являются невозможность контроля траектории скважины в пространстве, а также то, что оно может применяться только на буровых мащинах с невращающимся буровым ставом.
Известно устройство для проведения направленных скважин сложных траекторий, содержащее буровую мащину, буровой инструмент, механизм принудительн.ого управления, координатную систему и индикаторный блок 2.
Недостатком известного устройства является то, что оно обладает небольшой точностью и может применяться в комплексе с буровыми мащинами вращательного действия.
С целью повышения точности проведения скважин сложных траекторий буровыми мащинами с вращающимся буровым ставом предлагаемое устройство снабжено механизмом ориентирования и следящей трубой, имеющей снаружи продольные ножи, а внутри ребра с двумя втулками, причем на одной из
них закреплена венцовая щестерня. Механизм ориентирования состоит из двигателя, планетарной щестерни, входящей в зацепление с венцовой щестерней следящей трубы, датчика разворота координатной системы, представляющего собой потенциометр, корпус которого свободно подвещен на горизонтальной оси, а его подвижный контакт соединен с отвесным маятником. Координатная система состоит из верхней внутренней трубы и нижней внутренней трубы с центрирующим фонарем, соединенной с верхней трубой полым щарниром Гука, на осях которого закреплены потенциометры.
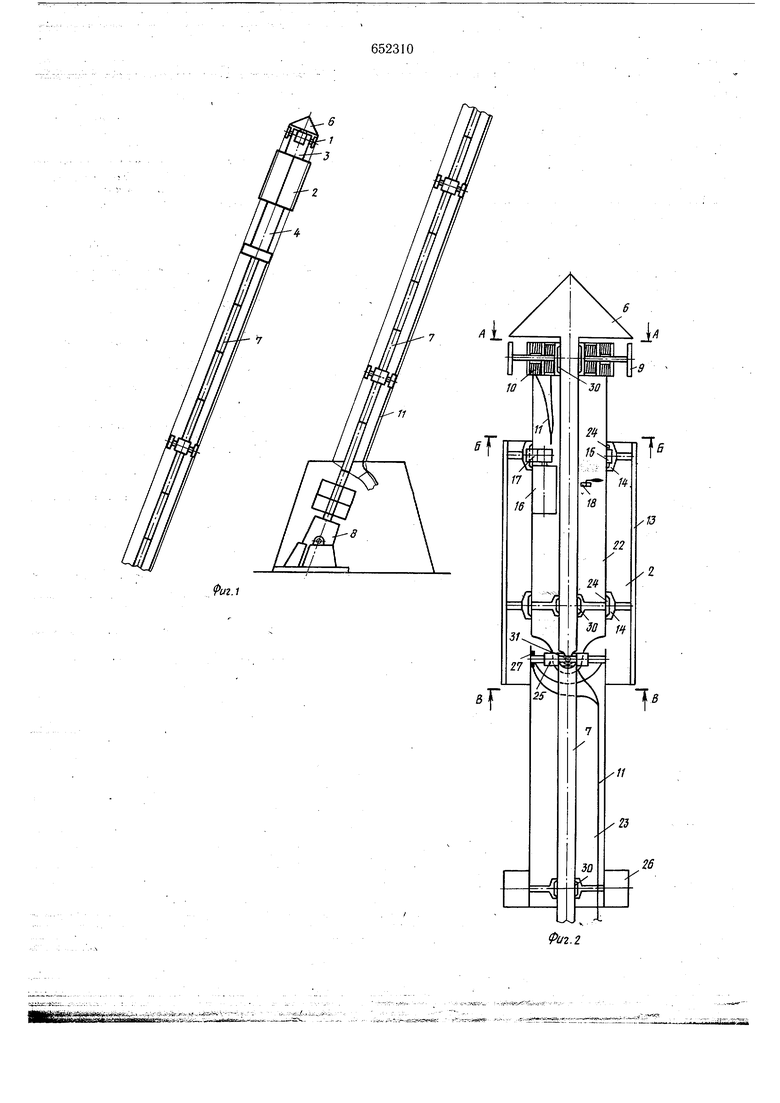
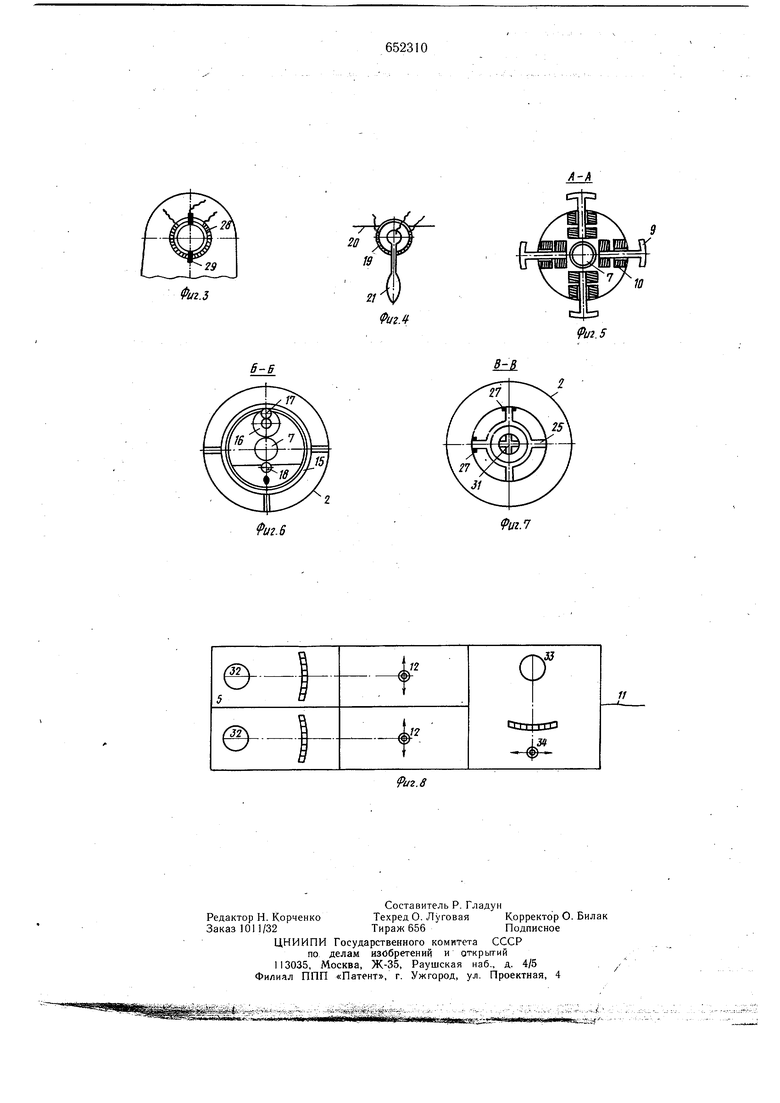
На фиг. 1 показано описываемое устройство; на фит. 2. - следящая труба, механизмы принудительного управления, ориентирования и координатная система; на фиг. 3 - потенциометр координатной системы; на фиг. 4 - датчик разворота кoopдинaт foй системы; на фиг. 5 - механизм принудительного управления движением буровой коронки (разрез по,А-А на фиг. 2); на фиг. 6 -; механизм ориентирования (разрез но Б-Б на фиг. 2); на фиг. 7 - разрез координатной системы но В-В на фиг. 2; на фиг. 8 - пульт контроля и управления.
Устройство состоит из механизма 1 нринудительного управления движением буровой коронки, следящей трубы 2,.механизма ориентирования 3, координатной системы 4 тр ектории скважины, пульта 5 контроля и управления, а также бурового инетрумента, включающего буровую коронку 6 и буровой став 7, которые получают вращение и подачу от буровой машины 8.
Механизм принудительного управления состоит из четырех отклонителей 9, силовых электромагнитов 10, соединенных с помондью кабеля 11 ,с кнопками 12 пульта контроля и управления..,..„.,,.,.;.,,.
Следящая труба 2 представляет собой полый и,илиндр, на наружной поверхности которого закреплены продольные ножи 13, а внутри него размещены ребра с двумя втулками 14, на одной из которых закреплена венцовая шестерня 15..
Механизм ориентирования выполнен из электродвигателя 16, приводящего во вращение планетарную шестерню 17, вхо гящую в зацепление с венцовой шестерней следящей трубы, и датчика 18 разворота координатной системы, представляюндего собой потенциометр, корпус 19 которого свободно подвешен на горизонтальной оеи 20, а егоподвижный контакт соединен с маятником 21, занимающим отвесное положение.
Координатная система состоит из верхней и нижней внутренних труб 22 и 23. В верхней трубе размещены механизмы принудительного управления и ориентирования. Верхняя внутренняя труба посредством нодшипников 24 посажена на втулки следяндей трубы и е помощью полого шарнира Гука 25 соединена с нижней внутренней трубой 23, на конце которой закреплен, центрирующий фонарь 26. На двух взаимно перпендикулярных осях крестовины шарнира Гука установлены потенциометры 27. Корпуса 28 потенциометров жестко скреплены с внутренними трубами, а их подвижные контакты 29 расположены на-крестовине полого щарнира Гука. Внутренние трубь с пойощ,ью подшипников 30 посажены набуровоистав 7, который в промежутке между верхней и нижней трубами соединен шарниром Гука 31.
Пульт контроля и управления выполнен из токоизмерительных приборов 32 вертикальной и горизонтальной плоскостей и токо,.,,-, .,,, ,;,„,/. .,; ....
-i:p ; -j- - f № s CV.:-r. 7vS 5 ;- --r-: f :
измерительного прибора 33 разворота координатной системы, которые с помощью кабеля 11 соединены с соответствующими потенциометрами 27 и 18. Потенциометры 27
координатной системы настраиваются так, чтобы при прямолинейном положении верхней и нижней внутренних труб токоизмерительные приборы 32 показывали нулевые отметки, а потенциометр 18 разворота коордид натной системы так, чтобы при совпадении одной из осей крестовины полого щарнира Гука 25 с вертикальной плоскостью токоизме рительный прибор 33 показывал нулевое значение. На пульте контроля н управления имеются КНОНКИ-: 12 управления силовыми электромагнитами и 34 управления электродвигателем механизма ориентирования.
Устройство работает следующим образом. От бурово й машины 8 получают вращение и подкачу ёуровой став 7 и буровая коронка 6. При подаче бурового инетрумента следящая труба 2 перемещается 6 скважине и благодаря наличию ножей 13 совершает поступательное движение. По токоизмерйтельному прибору 33 разворота координатной системы, расположенному на пульте контроля и управления, следят за отсутствием разворота координатной системы в вертикальной плоскости. При цоявлении разворота, который может возникнуть в результате вращения бурового става, включается кнопка 34 и по кабелю 1 на электродвигатель 16 механизма ориентирования подается напряжение. Вращение от электродвигателя передается планетарной шестерне 17, которая, окатываясь но неподвижной венцовой шестерне 15, разворачивает координатную сис,, тему. При этом подвижный контакт потенциометра с .маятником 21, занимающим отвесное положение, перемещается по неподвижной части потенциометра 19, а на токо, измерительлый прибор 33 разворота подается электрический сигнал рассогласования.
0 Когда на токоизмерительном приборе 33 .стрелка показывает нулевое положение, кнопка 34. упра.вления отключается. В этот мо- . мент ось крестовины полого шарнира Гука координатной систеМь и ось отклонителей механизма принудительного управления сов5 мещаются с вертикальной плоскостью.
При перемещении по скважине следящей трубы 2 перемещается верхняя внутренняя труба 22 и соединенная с ней полым шарниром Гука 25 нижняя внутренняя труба 23
0 с закрепленным на ее конце центрирующим фонарем 26. Трубы координатной системы благодаря наличию между ними щарнирного соединения Гука и плотного соприкасания со стенками скважины следуют по фактической траектории последней.
5 Если траектория скважины прямолинейна , то и внутренние трубы 22 и 23 координатной системы занимают прямолинейное положение, а подвижные контакты 29 потенциометров 27, установленные на взаимно перпендикулярных .осях крестовины полого шарнира Гука 25, - среднее положение, при которомтокоизмерительные приборы 32 вертикальной и горизонтальной плоскостей показывают нулевые отметки.
На криволинейных участках траектории скважинь внутренние трубы 22 и 23 координатной системы образуют между собой угол, что приводит к смещению подвижных конtaKTOB 29 потенциометров 27 вертикальной и горизонтальной плоскостей, в результате чего токоизмерительные приборы 32 показывают величину отклонения в вертикальной и горизонтальной плоскостях верхней внутренней трубы 22 с буровой коронкой 6 относительно нижней трубы 23.
Отсчет величин отклонений производится при остановленном буровом ставе после наращивания (сокращения) секции бурового става через равные интервалы. Считанные текущие положения координат буровой коронки в пространстве записываются в таблицу и по ее данным строится проекция траектории скважины в вертикальной и горизонтальной плоскостях. Если траектория скважины отклоняется от основного направления, то с помощью кнопок 12 пульта контроля и управления подают напряжение на один из силовых электромагнитов 10 механизма принудительного управления; выдвигается отклонитесь 9, который возвращает буровую коронку 6 к заданной траектории.
Формула изобретения
Источники информации, принятые во внимание при экспертизе
-.-- ---:ir.« « se-: ,
Фиг.5
W
ФигЛ
Pu2.5
2
