Изобретение относится к области процессов управления механизмами, машинами, роботами-манипуляторами, имеющими в качестве управляемых различные шарнирно-рычажные звенья, и может быть использовано в строительных и дорожных машинах при производстве земляных работ, в крановых установках с шарнирно-сочлененным рабочим оборудованием, имеющим жесткую кинематическую связь звеньев, в роботах-манипуляторах. Известны способы получения прямолинейной траектории выходных звеньев рычажных механизмов, например, движение ковша экскаватора с гидроприводом с помощью следящих систем, которые удерживают заданный параметр в функции от движения ведущего звена. Сущность способа управления заключается в том, что при наличии обратной связи составляют функцию перемещения ведомого звена через копирное устрбйство и следящий золотник. Задают положе ние копира и затем приводят в движение ведущее звено-рукоять. Ковш по отношению к рукояти не перемещают. Глубину копания определяют «расчетным путем с помощью настройки копирного устройства DlОднако известные способы обладают следующими недостатками: информация о положении выходного звена достигается сравнительно сложными устройствами,действие которых основано на громоздких вычислительных алгоритмах; в системах управления не используется возможность движения ковша из-за от сутствия необходимых алгоритмов; неточность изготовления исполнительных устройств и элементов обратной связи снижают эффективность их использования; включение приборов и устройств 1В силовой контур управления резко ухудшает динамические качества таких способов, что приводит к искажению прямолинейной траектории.
Известен также способ управления выходными звеньями рабочего оборудования, например, ковша, основанный на перемещении конечной тяги выходных звеньев по прямолинейной траектории с учетом перемещения начального и среднего звеньев. В этом способе после установки ковша в забой визуально выбирают оптимальный угол резания. В процессе копания грунта положение ковша на прямолинейной траектории при изменении угла наклона стрелы сохраняют неизменным за счет направления жидкости из цилиндра, соединяющего стрелу и рукоять, в цилиндр, поворачивающий ковш на угол, равный относительному угловому перемещению стрелы и рукояти 2.
В этом способе отслеживание поворота рукояти производится вручную поворотом стрелы, что вносит погрешность в положение ковша на траектории, искажая ее прямолинейность, а для всего процесса в целом отсутствует обрат-ная связь, без образования которой возникает указанный выше недостаток.
Цель изобретения - упрощение процесса управления.
Поставленная цель достигается тем что определяют алгебраическую сумму внешних углов, образованных выходными звеньями, угла между начальным звеном и вертикалью и угла между конечным звеном и вертикалью, алгебраическую сумму угловых скоростей выходных звеньев и осуществляют синхронно движение выходных звеньев, поддерживая найденную сумму углов постоянной при изменении величин отдельных углов, а сумму угловых скоростей равно нулю.
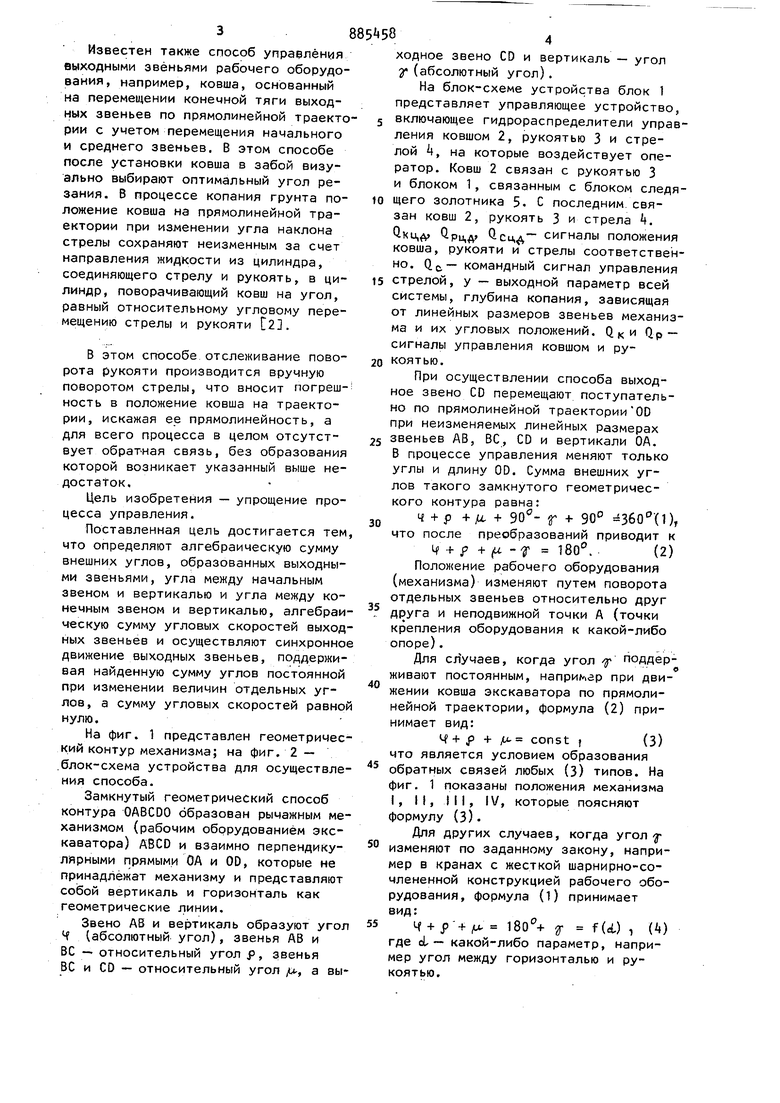
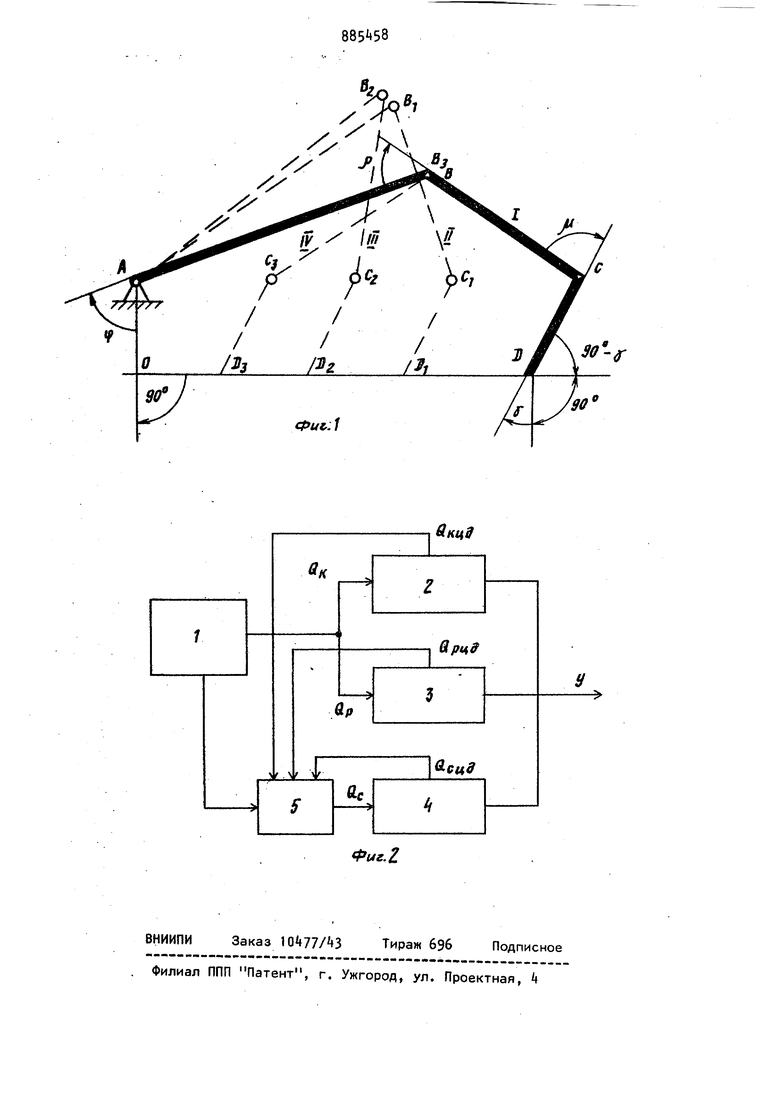
На фиг. 1 представлен геометрический контур механизма; на фиг. 2 - .блок-схема устройства для осуществления способа.
Замкнутый геометрический способ контура OABCDO образован рычажным механизмом (рабочим оборудованием экскаватора) ABCD и взаимно перпендикулярными прямыми ОА и OD, которые не принадлежат механизму и представляют со15ой вертикаль и горизонталь как геометрические линии.
Звено АВ и вертикаль образуют уго Ч (абсолютный угол), звенья АВ и ВС - относительный угол р, звенья ВС и CD - относительный угол , а выходное звено CD и вертикаль - угол
7(абсолютный угол).
На блок-схеме устройства блок 1 представляет управляющее устройство,
включающее гидрораспределители управления ковшом 2, рукоятью 3 и стрелой k, на которые воздействует оператор. Ковш 2 связан с рукоятью 3 и блоком 1, связанным с блоком следящего золотника 5. С последним, связан ковш 2, рукоять 3 и стрела k, рцд сигналы положения ковша, рукояти и стрелы соответственно. QC.- командный сигнал управления
5 стрелой, у - выходной параметр всей системы, глубина копания, зависящая от линейных размеров звеньев механизма и их угловых положений. Qp - сигналы управления ковшом и ру0 КОЯТЬЮ.
При осуществлении способа выходное звено СО перемещают поступательно по прямолинейной траекторииOD при неизменяемых линейных размерах 5 звеньев АВ, ВС, CD и вертикали ОА.
8процессе управления меняют только углы и длину OD. Сумма внешних углов такого замкнутого геометричесравна:кого контура
4 + р -t-HL + 90- f + 90° 36Q°( 1), что после преобразований приводит к Lf -f j + (ti -7- 180°. (2)
Положение рабочего оборудования (механизма) изменяют путем поворота отдельных звеньев относительно друг друга и неподвижной точки А (точки крепления оборудования к какой-либо опоре).
Для случаев, когда угол - поддерживают постоянным, например при движении ковша экскаватора по прямолинейной траектории, формула (2) принимает вид:
j3 + / const f (З) что является условием образования обратных связей любых (3) типов. На фиг, 1 показаны положения механизма I, И, III, IV, которые поясняют формулу (3).
Для других случаев, когда угол у изменяют по заданному закону, например в кранах с жесткой шарнирно-сочлененной конструкцией рабочего оборудования, формула (1) принимает вид:
Ч + р-+;и. у f(i) , (Ц) где oL - какой-либо параметр, например угол между горизонталью и рукоятью.
Формула (t) также является основой создания обратных связей любого типа.
Указанные формулы справедливы для статики приведенных выше механизмов. Для получения условий использования обратных связей в кинематике формулы (1) - (k) дифференцируют по времени и получают:
Cp+ji + -j 0;(5)
Cf + J3 + О ;(6)
Cf + p +/г f(d).(7)
Техническая реализация способа управления движением механизмов с шарнирно-рычажным устройством рабочего оборудования заключается в получении информации об угловом положении звеньев в процессе перемещения их с помощью различных датчиков, сигналы которых используют для обеспечения перемещения конечной точки выходного звена по прямолинейной траектории.
Применительно к экскаватору способ управления можно реализовать следующим образом.
Положение стрелы k, рукояти 3 и ковша 2 относительно друг друга и неподвижной опоры регистрируют с помощью известных датчиков по сигналам
ЧКЦА ОрцА сц,А формулы (3) следует, что, если оператор управляет ковшом 2 и рукоятью 3 произвольным образом, угол V изменяют поворотом звена АВ так, чтобы формула (З) выполнялась, т.е. сумму полученных сигналов поддерживают постоянной. При отклонении от заданного конкретного значения постоянной исполнительным устройством перемещают звено АВ, приводя угол Ч в соответствие с формулой (З)} ликвидируя это отклонение. Для экскаваторов с гидроприводом таким исполнительным устройством является следящий золотник, который приводят в действие механически, электрически, гидравлически или другим способом при появлении рассогласования в сумматоре.
С помощью задатчика глубины копания (линия ОА на фиг. 1) выбирают необходимую отметку. Шкалу задатчика градуируют, в функции линейного размера АО и угла Ч , при этом штоки гидроцилиндров ковша 2 и рукоятки 3 втягивают до упора, т.е. градуировку ведут при постоянных значениях yi- лов и AL. Затем производят установку ковша в забой ручным управлением гидроцилиндра стрелы (звено АВ),
поворачивают ковш 2 на оптимальный угол резания, который определяют в соответствии со шкалой глубин. В результате такого поворота стрела отслеживает движение ковша 2, удерживая режущую кромку.его на прямой линии OD. В режиме копания рукоять 3двигают на себя, а ковш 2 в противоположную сторону согласно формуле
(6). Стрела k отслеживает движение рукояти 3 и ковша 2, оставляя режу{щую кромку ковша 2 на прямой OD. датчиков положения ковша 2, рукояти 3 и стрелы k йкц Pvw
принимают с помощью сумматора, вхо- .. дящего в блок следящего золотника (БСЗ). Результирующим, полученным . после суммирования сигналом, воздействуют на следящий золотник, который
; командой Q управляет стрелой f. Вы|Ходной параметр всей системы у - глубина копания.
Таким образом, использованием трех подвижных звеньев рабочего оборудования экскаватора и полученных зависимостей для образования следящей системы обеспечивается возможность достижения прямолинейного движения режущей кромки ковша.
Формула изобретения
Способ управления рабочим оборудованием экскаватора, основанныйид перемещении конечной точки выходных
звеньев по прямолинейной траектории с учетом перемещения начального и среднего звеньев, отличающийся тем, что, с целью упроще ния процесса управления определяют
алгебраическую сумму внешних углов, образованных выходными звеньями, угла между начальным звеном и вертикалью и угла между конечным звеном и вертикалью, и алгебраическую сумму
угловых скоростей выходных звеньев и осуществляют синхронное движение выходных звеньев, поддерживая найденную сумму углов постоянной при изменении величин отдельных угловi а
сумму угловых скоростей равной нулю.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР tf , кл. Е 02 F 9/26, 1968.
2.Патент ФРГ № 2 39967, опублик, 1976.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| Устройство для управления ковшомэКСКАВАТОРА | 1978 |
|
SU804789A1 |
| Устройство автоматического управления гидравлическим экскаватором | 1988 |
|
SU1641953A1 |
| Способ копания одноковшовым экскаватором и устройство для его осуществления | 1976 |
|
SU749988A1 |
| Способ копания одноковшовым гидравлическим экскаватором и одноковшовый гидравлический экскаватор | 1982 |
|
SU1016433A1 |
| Рабочее оборудование одноковшового экскаватора | 1979 |
|
SU777164A1 |
| Рабочее оборудование экскаватора | 1986 |
|
SU1435718A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1971 |
|
SU299610A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ЭКСКАВАТОРА | 2024 |
|
RU2833979C1 |
| Рабочее оборудование гидравлического одноковшового экскаватора | 1969 |
|
SU626168A1 |
r .
врц9
в-сцд
Фиг.2
