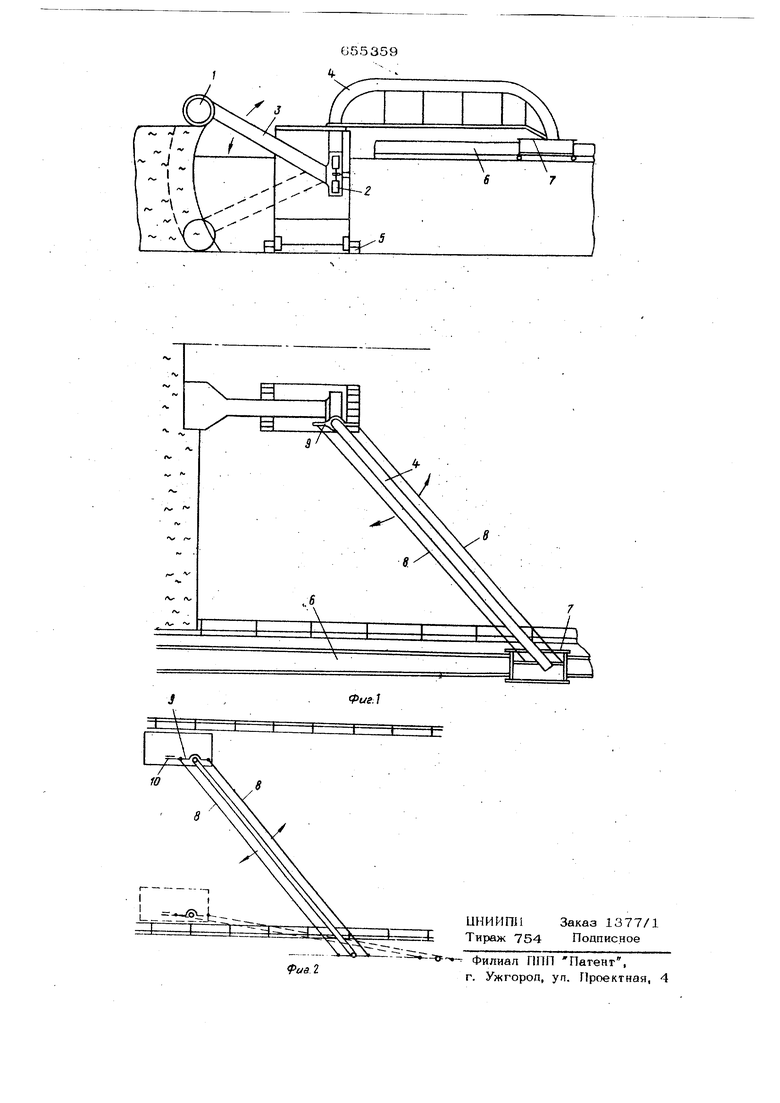
тем самым метаппоемкости устройства, упрсйцения его монтажа н перестановки из одной трАншеи в другую. Указанная цець достигается создание устройства, опирающегося на дно транше и перемешакшегося по нему без направляющих путей. Ходовая часть устройства например, в виде гусешщ, приспособлена для передвижения по бетонпрованно.чгу дну траншеи и HNeeT независимые электр приводы правой и левой сторон. Для выполнения прямолинейных движений поперек траншей (без направлякицих пууей) ycrpofcTBo, кроме ходовой части, снабже но шщ)ннрным параплепограммгзым механизмом, 51Влякшимся ориентиром попо жения устройства в траншее. Один из сторон паралпепограммного механизма опирается и ориентируется по направлению на стационарные направляющие пути а противоположная (параллельная) ей сторона опирается шаркирно на устрой- ство и взаимодействует с. катушкой потенциометра, установленной на устройст ве. При выполнении устройством парал лельных движений поперек траншеи, катушка потенциометра и сторона параллелограммного механизма находятся в контакте. При отклонении устройства от /заданного направления движения потенциометр подает команду электроприводу соответствующей стороны. ходовой части устройства и оно восстанавливает свое первоначальное положение, На . 1 - в двух проекциях уоройство дпя разгрузки траншейных хранилищ кормов, установленное в наземной транщее; на фиг. 2 - поножение параллелограммного механизма при против положных положениях устройства в траншее (вид сверху). Устройство снабжено рабочим органом 1, вентилятором 2, всасывающим транспортером 3 и нагнетательным тран портером 4; Ходовая часть 5 устройств ва выполнена дпя его опоры на бетониро ванное дно траншеи, левая и правая стороны ходовой части 5 индивидуальные электроприводы. Ходовая часть 5 может иметь устройство дпя ступенчатого перемещения устройства вдоль траншеи (на чертеже не показано). Транспортер 4 выполнен шарнирным относительно опор, опирается одним концом на устройство, а вторым на стацио- нарный транспортер 6, установленный на бруствере траншеи. Опора транспорте ра 4 на стационарный транспо этер 6 выполнена скользящей, дня чего спужит тележка 7, опирающаяся колесами на стационарного транспортера 6, Устройство снабжено шарнирным параллелограммным механизмом. Жест КИМ шарнирным звеном параллелограм- много механизма является транспортер 4, распопоженный между шарнирными звеньями 8 и параллельно им. Шарнирные звенья 8 работают на растяжение, закреплены с одной стороны к тележке 7, с другой стороны к жестко у звену 9 пара л леяограм много механизма. Длины звеньев дараллелограл много механизма равны попарно. . Устройство снабжено потенциометро 10 с закреплением зпемента потенциометра-катушки на устройстве, а стержня на звене 9, Потенциометр 10 имеет электрическую связь с электроприводами ходовой части 5 устройства. Забор корма устройством производится при движении рабочего органа 1 сверху вниз. Для повторения хода рабочего органа устройство передвигается поперек траншей в новое положение. Поспе забора слоя корма по всей ширине траншеи, уст ройство перемешается вдоль траншеи на щаг, равный ширине срезаемого слоя корма; шаговое перемещение устройства вдоль траншеи может осуществляться с помо шью специального устройства, например, выдвижных колёс, снабженных электроприводом. Перемещение устройства вдоль траншеи на определенный шаг может осуществляться также с помощью ходовой части 5 устройства. Перемещение осуществляется в результате последовательных движений устройства при его подходе к стенке траншеи; поворота на одной гусенице на определенный угол, движения, вперед, обратного разворота и движения назад к стене траншеи. Цикл движений осуществляется Б автоматическом режиме. Поворот устройства осуществляется при временном отключении потенциометра . При движении устройства в траншее. звено 9 параллелограммного механизма постоянно остается параллельным стационарному транспортеру 6, проложенно- Njy вдоль траншеи по брустверу. При прямолинейном движении устройства перпендикулярно стационарному транспортеру 6 (также оси траншей.) катушка и стержень потенциометра 10 находятся в контакте. При отклонении направления дви-. женчя устройства катушка и стержень потенциометра 10 выходят из контакта. При этом по электроцепи подается, коман да на движение только одной стороны ходовой части 5 устройства и оно воостанавливает прежнее свое положение. Таким образом осуществляются движения устройства в траншее без направляющих путей. При движении устройства от стены до стены траншеи (фиг. 2) тележка 7 передвигается по раме стационарного транспортера 6. Тем самым осушествляется постоянная связь параллелограммного механизма и транспортера 4 с нанравляк щими путями, которыми служит стационарный транспортер 6, В . крайних положениях хода устройст ва поперек траншеи оно останавпивается и меняет направление движения в резул тате у пора 1 контактных датчиков в стену траншеи. Пблнь й рабочий цикл загрузчик П оизвоцится в автоматизированном режи ме. Применение предложенного устройства в сравнении с прототипом снижает приведенные затраты корма, увеличивает диапазон размеров ферм, на которь1х экономически эффективно нопользование устройств для разгрузки траншей, работаюших в автоматическом режиме и в комплекте со стационарной системой транспортирования кормов. Формула изобретения 1. Устройство для разгрузки траншейных хранилищ кормов, содержащее ходовую часть,на раме которой устаниьлен рабочий орган , и перегрузочный транспортер, связанный с транспортным средством, установленным за пределами траншеи, отличаюшееся тем, что, с целью обеспечения заданного движения устройства в траншее без использования направляющих путей для ходовой части, оно снабжено средством для KOJ ректирования движения его ходовой части относительно заданного направления, выполненным в виде параллелограммногомеханизма, одни из концов тяг которого посредством неподвижного звена связаны с рамой ходовой части, а другие - с транспортным средством, установленным за пределами траншеи, и потенцио метра, который служит для подачи эпект рического сигнала в цепь управления Хб« доьой части при оттслоненви ее перемеше ния от заданного направления. 2. Устройство .по. 1, о т л н ч а е е с я тем, что потенциометр выполнен из катушки, закрепленной на раме ходовой части, и стержня, скрепленного с неподвижным звеном, связывающим кошш тяг шарнирного параллелограмма . с рамой ходовой части. Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР № 204799, кл. А О1 D 87/6О, 1966. 2.Семенихин А. Н, и др. Электрифи-, цировашшй погрузчик силоса .Техника в сельском хозяйстве 1974, JSfe 8, с.83.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для разгрузки траншейных хранилищ кормов | 1979 |
|
SU993872A1 |
| Выгрузчик силоса | 1989 |
|
SU1704682A1 |
| УСТРОЙСТВО И СПОСОБ ПРОКЛАДКИ КАБЕЛЕЙ | 2017 |
|
RU2747769C1 |
| ЗАГРУЗЧИК-ВЫГРУЗЧИК СТЕБЕЛЬНЫХ КОРМОВ ДЛЯ ГОРИЗОНТАЛЬНЫХ СИЛОСНО-СЕНАЖНЫХ ХРАНИЛИЩ | 2007 |
|
RU2356213C2 |
| Роторный экскаватор специального назначения | 2024 |
|
RU2834251C1 |
| СПОСОБ УПЛОТНЕНИЯ ЩЕБНЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ШПАЛОПОДБИВОЧНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2048630C1 |
| Установка для обработки кормов | 1980 |
|
SU897217A1 |
| Машина для внесения органических и органо-минеральных удобрений в почву междурядий, например, виноградников | 1961 |
|
SU144651A1 |
| Погрузчик силоса | 1979 |
|
SU845813A1 |
| УНИВЕРСАЛЬНЫЙ ТРУБОУКЛАДОЧНЫЙ МОДУЛЬ БОЛОТНЫЙ | 2016 |
|
RU2696706C2 |