Изобретение относится к сельскохозяйственному машиностроению, а именно к выгрузчикам силоса, сенажа из буртов, курганов и наземных хранилищ траншейного типа.
Известны пневматические погрузчики кормов, включающие заборный орган, установленный на конце всасывающего пнев- мотрубопровода, соединенного с опорной рамой поворотным в вертикальной плоскости параллелограммным четырехзвенни- ком, одним из звеньев которого является корпус вентилятора с напорным трубопроводом.
Однако такие погрузчики характеризуются конструктивной сложностью, обусловленной наличием вентилятора, ограниченностью зон захвата материала, вызванной маятниковыми движениями заборного органа и низкой производительностью из-за необходимости частых перемещений погрузчика после забора всей массы в. месте установки.
Известны выгрузчики, включающие цепочно-планчатый питатель, укрепленный на каретке, перемещающейся по вертикальным направляющим, и подающий транспортер, соединенный шарнирно с питателем и свободно опирающийся на раму.
Недостатками являются ограниченность зоны захвата, обусловленная перемещением рабочего органа только в вертикальной плоскости, и низкая производительность вследствие многократных перемещений в процессе работы.
Наиболее близким по конструктивному исполнению и достигаемому эффекту к предлагаемому является выгрузчик силоса, включающий раму, питатель, установленный на каретках, и систему транспортеров, причем горизонтальная каретка имеет механизм возвратно-поступательного перемещения, выполненный в виде бесконечного цепного контура с зацепом, взаимодействующим с упорами каретки, и механизм управления вертикальным перемещением питателя.
Недостатками такого выгрузчика являются недостаточная производительность и неравномерность выгрузки, обусловленная контролем заглубления питателя по времени, а не по заданной величине заглубления. Цель изобретения - повышение производительности за счет обеспечения постоянного объема забора массы.
Указанная цель достигается тем, что в
выгрузчике силоса, имеющем раму, питатель на каретках, механизм управления питателем, транспортирующие органы, механизм управления питателя выполнен в виде кривошипно-шатунного механизма, в котором
подпружиненное коромысло взаимодействует с рамой через клин с фиксатором, кото- рые установлены на горизонтальной каретке, а ползун кривошипного механизма имеет упоры, взаимодействующие один с
массой, а другой с переключателем привода вертикальной каретки.
Выполнение механизма управления в виде питателя, обеспечивающего обратную непосредственную связь величины заглубления пиловинтовых рабочих органов с приводом механизма заглубления путем кинематической связи через рычажный механизм крайних положений рабочего органа с включением механизма заглубления и кинематической связи слоя монолита корма с отключением механизма заглубления, позволяет выдерживать заданную глубину фрезерования независимо от неравномерности физико-механических свойств материала и качества его укладки, что, в свою очередь, обеспечивает неравномерность выгрузки материала до ±.15%, повышение производительности и снижение энергоемкости процесса.
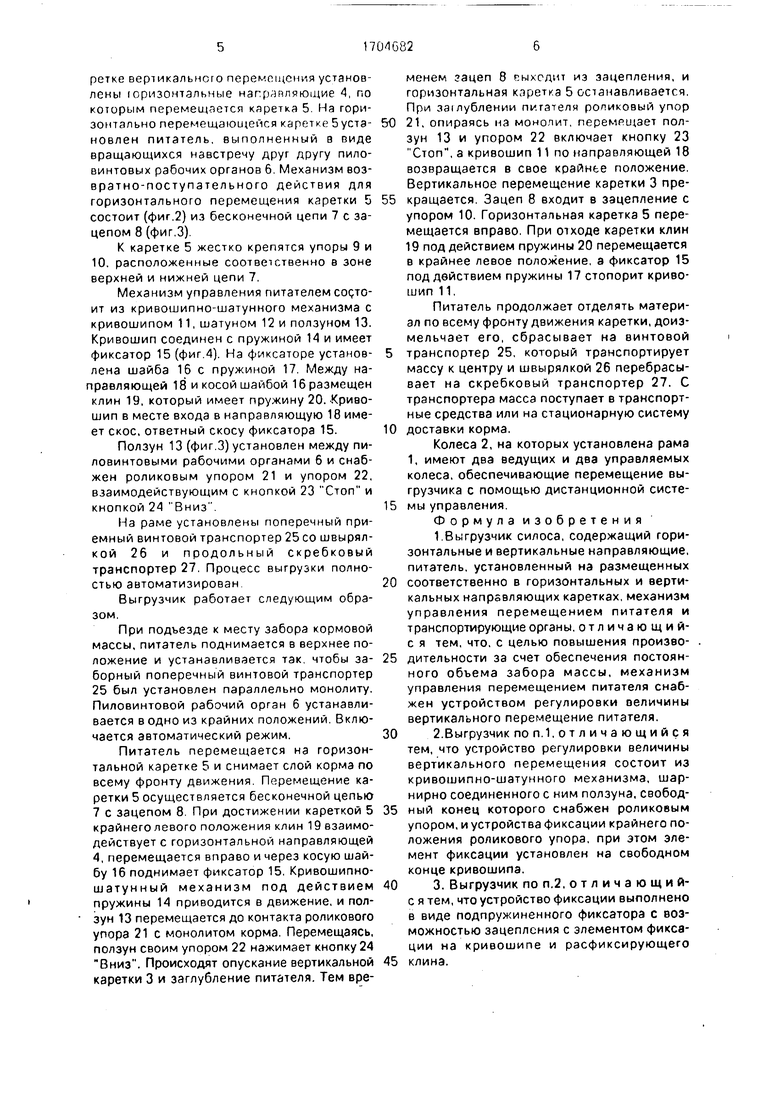
На фиг.1 изображен выгрузчик силоса,
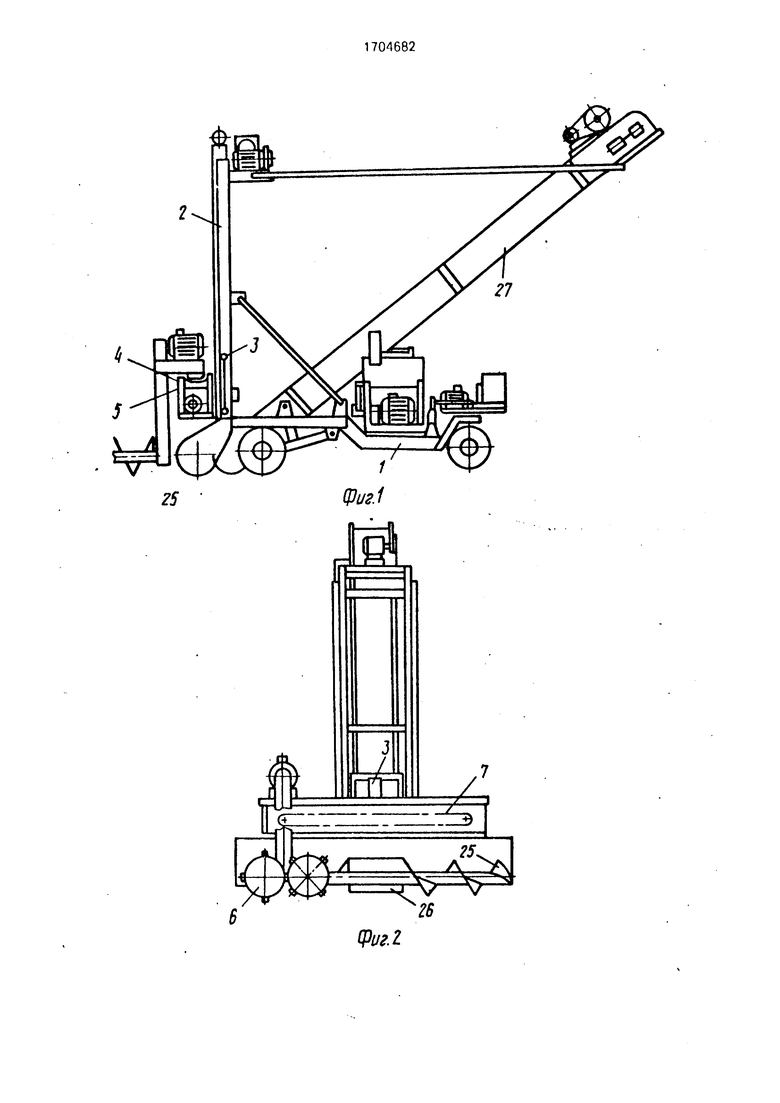
вид сбоку; на фиг.2 - то же, вид спереди; на
фиг.З - механизм управления питателем; на
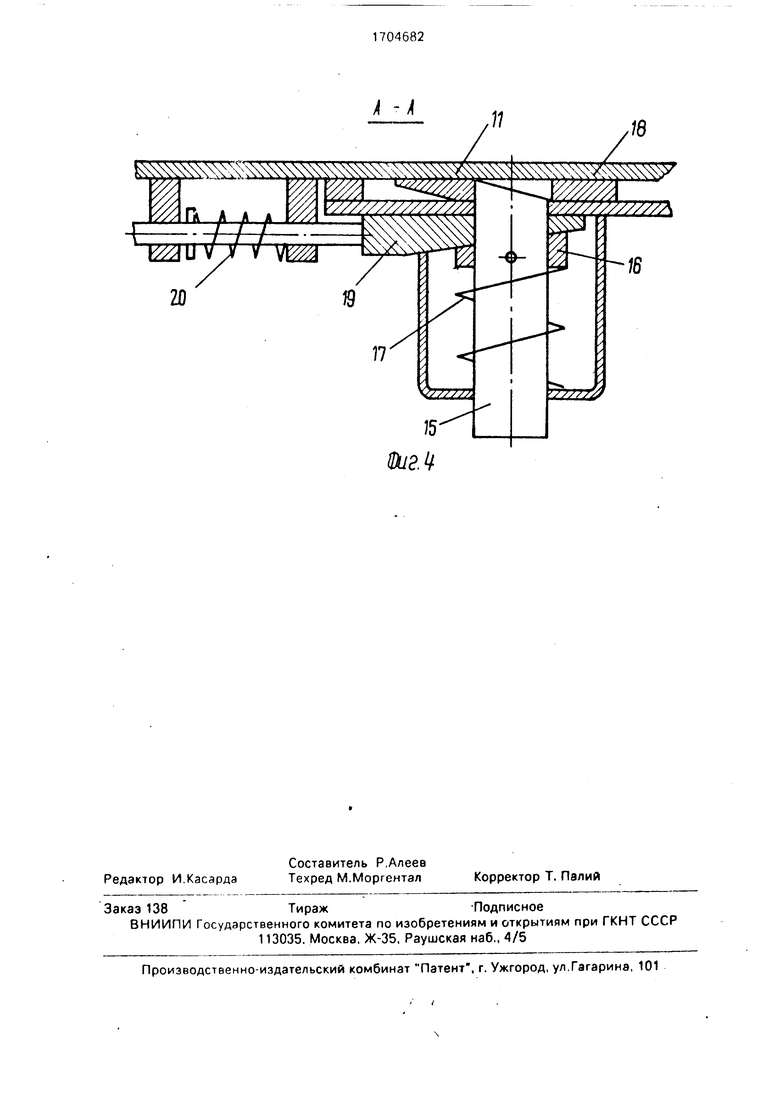
фиг.4 - конструкция фиксатора с клином.
Выгрузчик силоса (фиг.1) имеет ходовую
систему 1, вертикальную направляющую 2, по которой перемещается каретка 3. На каретке вертикального перемещения установлены (оризонтальные направляющие 4, по которым перемещается каретка 5. На горизонтально перемещающейся каретке 5 уста- новлен питатель, выполненный в виде вращающихся навстречу друг другу пило- винтовых рабочих органов 6. Механизм возвратно-поступательного действия для горизонтального перемещения каретки 5 состоит (фиг.2) из бесконечной цепи 7 с зацепом 8 (фиг.З).
К каретке 5 жестко крепятся упоры 9 и 10. расположенные соответственно в зоне верхней и нижней цепи 7.
Механизм управления питателем состоит из кривошипно-шатунного механизма с кривошипом 11, шатуном 12 и ползуном 13. Кривошип соединен с пружиной 14 и имеет фиксатор 15 (фиг.4). На фиксаторе установ- лена шайба 16 с пружиной 17. Между направляющей 18 и косой шайбой 16 размещен клин 19, который имеет пружину 20. Кривошип в месте входа в направляющую 18 имеет скос, ответный скосу фиксатора 15.
Ползун 13 (фиг.З) установлен между пи- ловинтовыми рабочими органами 6 и снабжен роликовым упором 21 и упором 22, взаимодействующим с кнопкой 23 Стоп и кнопкой 24 Вниз.
На раме установлены поперечный приемный винтовой транспортер 25 со швырял- кой 26 и продольный скребковый транспортер 27. Процесс выгрузки полностью автоматизирован.
Выгрузчик работает следующим образом.
При подъезде к месту забора кормовой массы, питатель поднимается в верхнее положение и устанавливается так, чтобы за- борный поперечный винтовой транспортер 25 был установлен параллельно монолиту, Пиловинтовой рабочий орган 6 устанавливается в одно из крайних положений. Включается автоматический режим.
Питатель перемещается на горизонтальной каретке 5 и снимает слой корма по всему фронту движения. Перемещение каретки 5 осуществляется бесконечной цепью 7 с зацепом 8. При достижении кареткой 5 крайнего левого положения клин 19 взаимодействует с горизонтальной направляющей 4, перемещается вправо и через косую шайбу 16 поднимает фиксатор 15, Кривошипно- шатунный механизм под действием пружины 14 приводится в движение, и ползун 13 перемещается до контакта роликового упора 21с монолитом корма. Перемещаясь, ползун своим упором 22 нажимает кнопку 24 Вниз. Происходят опускание вертикальной каретки 3 и заглубление питателя. Тем временем зацеп 8 еыходит из зацепления, и горизонтальная каретка 5 останавливается. При заглублении питателя роликовый упор 21, опираясь на монолит, перемещает ползун 13 и упором 22 включает кнопку 23 Стоп, а кривошип 11 по направляющей 18 возвращается в свое крайнее положение. Вертикальное перемещение каретки 3 прекращается. Зацеп 8 входит в зацепление с упором 10. Горизонтальная каретка 5 перемещается вправо. При отходе каретки клин 19 под действием пружины 20 перемещается в крайнее левое положение, а фиксатор 15 под действием пружины 17 стопорит кривошип 11,
Питатель продолжает отделять материал по всему фронту движения каретки, доиз- мельчает его, сбрасывает на винтовой транспортер 25, который транспортирует массу к центру и швырялкой 26 перебрасывает на скребковый транспортер 27. С транспортера масса поступает в транспортные средства или на стационарную систему доставки корма.
Колеса 2, на которых установлена рама 1, имеют два ведущих и два управляемых колеса, обеспечивающие перемещение выгрузчика с помощью дистанционной системы управления.
Формула изобретения
1.Выгрузчик силоса, содержащий горизонтальные и вертикальные направляющие, питатель, установленный на размещенных соответственно в горизонтальных и вертикальных направляющих каретках, механизм управления перемещением питателя и транспортирующие органы, отличающий- с я тем, что, с целью повышения производительности за счет обеспечения постоянного объема забора массы, механизм управления перемещением питателя снабжен устройством регулировки величины вертикального перемещение питателя.
2.Выгрузчик по п.1,отличающийся тем, что устройство регулировки величины вертикального перемещения состоит из кривошипно-шатунного механизма, шар- нирно соединенного с ним ползуна, свободный конец которого снабжен роликовым упором, и устройства фиксации крайнего положения роликового упора, при этом элемент фиксации установлен на свободном конце кривошипа.
3. Выгрузчик по п.2, отличающий- с я тем, что устройство фиксации выполнено в виде подпружиненного фиксатора с возможностью зацепления с элементом фиксации на кривошипе и расфиксирующего клина.
CM
со
Ј Ч
О
г
N
I
«v«
$
/
«NJ
I
tvj
20
А -К
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузчик силоса | 1979 |
|
SU845813A1 |
| Установка для укладки керамических камней на сушильные вагонетки | 1983 |
|
SU1133104A1 |
| ЗАГРУЗЧИК-ВЫГРУЗЧИК СТЕБЕЛЬНЫХ КОРМОВ ДЛЯ ГОРИЗОНТАЛЬНЫХ СИЛОСНО-СЕНАЖНЫХ ХРАНИЛИЩ | 2007 |
|
RU2356213C2 |
| Выгрузчик силоса из башенных хранилищ | 1990 |
|
SU1752268A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ КОНДИТЕРСКИХ ПЛАСТОВ | 1994 |
|
RU2101957C1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| Плоскопрокатное устройство для поперечно-клиновой прокатки | 1988 |
|
SU1569066A1 |
| Устройство для уплотнения подвижных смесей | 1977 |
|
SU707804A1 |
| Рабочий орган выгрузчика корма изХРАНилищ | 1979 |
|
SU843847A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2130410C1 |
Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для выгрузки силоса, сенажа из буртов, курганов и наземных хранилищ траншейного типа. Цель изобретения - повышение производительности за счет обеспечения постоянного объема забора массы. Выгрузчик силоса имеет ходовую систему 1. вертикальную направляющую 2, по которой перемещается каретка 3. На каретке 3 вертикального перемещения установлены горизонтальные направляющие 4, по которым перемещается каретка 5. На горизонтально перемещающейся каретке 5 установлен питатель, выполненный в виде двух вращающихся навстречу друг другу пиловинтовых рабочих органов 6. Механизм возвратно-поступательного действия для горизонтального перемещения каретки 5 состоит из бесконечной цепи 7 с зацепом 8. Механизм
| Погрузчик силоса | 1979 |
|
SU845813A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Дверной замок, автоматически запирающийся на ригель, удерживаемый в крайних своих положениях помощью серии парных, симметрично расположенных цугальт | 1914 |
|
SU1979A1 |
