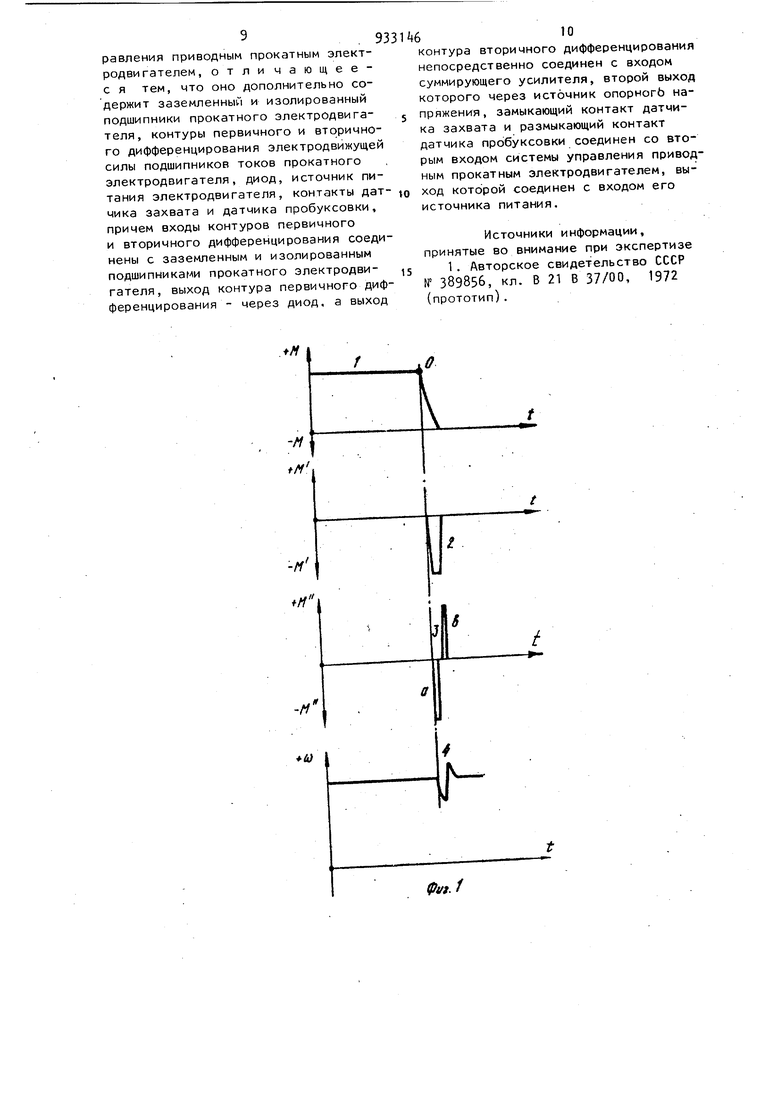
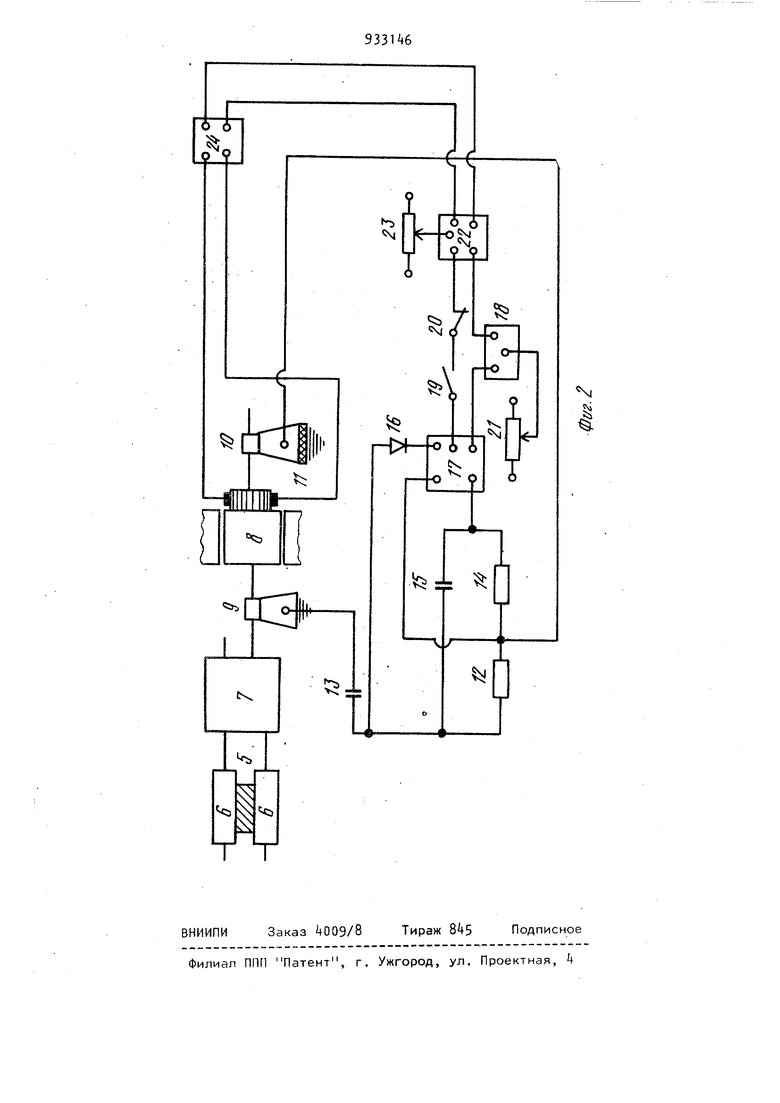
воде и величины раскрытия зазоров и ударов - в элементах валопровода в направлении вращения в процессе выброса слитка. Целью изобретения является уменьшение механических напряжений в вало проводе и повышение быстродействия и надежности отработки управляющих воздействий; Для достижения поставленной цели по .способу уменьшения ударов в кинематической линии клети прокатного ста на, заключающемуся в том, что измеря ют механическую нагрузку во вращающихся частях линии Клети, сравнивают ее со значением линии клети, сравнивают ее со значением нагрузки, измеренным на электродвигателе, полученную разность сравнивают с заданным значением и обрабатывают их отклонение воздействием на систему управления приводным электродвигателем дополнительно дважды дифференцируют при выбросе слитка значения механического момента в валопроводе, сравнивают значения производных механического момента с эталонным значением, уменьшают частоту вращения прокатного электродвигателя на время действия первой производной механического момента, а затем увеличивают частоту вращения электродвигателя на время действия второй производной механического момента в валопроводе, обрабатывая отклонение сравниваемых значений механических моментов воздействием на систему автоматического регулирования частоты вращения прокатного электродвигателя. Для достижения поставленной цели устройство для осуществления Способа содержащее валки, шестеренную клеть, прокатные электродвигатели, суммирую щий усилитель, источник эталонного напряжения сравнения и сиотему управ ления приводного прокатного электродвигателя, причем первый выход суммирующего усилителя через источник опорного напряжения соединен с первым входом системы управления привод ным прокатным электродвигателем, до полнительно содержит заземленный и изолированный подшипники прокатного электродвигателя, контуры первичного и вторичного дифференцирования элект родвижущей силы подшипников токов прокатного электродвигателя, диод, источник питания электродвигателя, контакты датчика захвата и датчика пробуксовки, причем входы контура первичного и вторичного дифференцирования соединены с заземленным и изолированным подшипниками прокатного электродвигателя, выход контура nef)вичн го дифференцирования - через диод, а выход контура вторичного дифференцирования - непос(эедственно соединены с входом суммирующего усилителя, второй выход которого через источник опорного напряжения, замыкающий контакт датчика захвата и размыкающий контакт датчика пробуксовки соединен с вторым входом системы управления приводным прокатным электродвигателем, выход которой соединен с входом его источника питания. На фиг. 1 изображены: 1- кривая изменения момента М в валопроводе, начиная от точки выброса (О). 2- первая производная момента М , 3- вторая производная момента М (первый импульс - Q, второй импульс - 1) . . кривая изменения частоты вращения прокатного электродвигателя (при воздействии на него сигналами, пропорциональными М , и М ) . На фиг. 2 представлено устройство, I реализующее предлагаемый способ. Устройство.содержит слиток 5, валки 6, шестеренную клеть 7, прокатный электродвигатель 8, заземленный подшипник 9 электродвигателя, изолированный подшипник 10 электродвигателя, изолирующую прокладку 11, резистор 12 контура первичного дифференцирования, конденсатор 13 контура первичного дифференцирования, резистор 1 контура вторичного дифференцирования-, конденсатор 15 контура вторичного дифференцирования, диод 16, суммирующий усилитель 17, источник 18 эталонного напряжения сравнения, замыкающий контакт 19 датчика захвата, размыкающий контакт 20 датчика пробуксовки, потенциометр (задатчик) 21 эталонного напряжения сравнения, система 22 регулирования частоты вращения прокатного электродвигателя, потенциометр 23 (задатчик) частоты вращения прокатного электродвигателя и источник 2k питания прокатного электродвигателя. Слиток 5 прокатывается в валках 6, приводимых через шестеренную клеть 7 прокатным электродвигателем 8. 5 Один из подшипников 9 электродвигателя, как обычно, заземлен, а другой - 10 - изолирован от земли- с помощью прокладки 11. К заземленному и изолированному подшипникам 9 и 10 электродвагителя подключены контуры первичного и вторичного дифференцирования. Выходы контуров первичного дифференцирования - через диод 16, а вторичного дифференцирования - непосредственно - подключены к входу сум мирующего усилителя 17. Выход усилителя 17 через источник 18.эталонного напряжения сравнения, замыкающий контакт 19 датчика захват и размыкающий контакт 20 датчика про буксовки подключен к входу системы 22 регулирования частоты вращения электродвигателя 8, величина которой задается потенциометром (задатчиком) 23. Выход системы 22 регулирования подключен.к входу источника 2 питания электродвигателя 8. При прокатке слитка 5 в валках 6 механический момент М в валопроводе представляет собой горизонтальную часть кривой 1 (фиг. 1). При этом электродвижущая сила под шипниковых токов прокатного электродвигателя 8, возникающая между его изолированным подшипником 10 и землей (или между изолированным и заземленным подшипниками 10 и 9), имеет определенную величину. В начале выброса слитка 5 из валков 6 (см. точку О кривой 1, фиг.1) и связанным с этим уменьшением механического момента, в валопроводе воз никает изменение магнитоупругих свойств участка вала прокатного элек родвигателя 8 между его заземленным и изолированным подшипниками 9 и Ю. в результате чего произойдет изменение электродвижущей силы подшипниковых токов электродвигателя 8. В результате, на выходе контуров первичного и вторичного дифференцирования возникают сигналы, пропорцио нальные первой М и второй М производным механического момента в валопроводе (см. кривую 2 и импульс на кривой 3, фиг. 1). . Указанные сигналы через суммирующий усилитель 17 и, далее, через источник 18 эталонного напряжения срав нения, замыкающий контакт 19 датчика захвата и размыкающий контакт 20 дат 466 чика пробуксовки поступает на вход системы 22 автоматического регулирования , выход которой подключен к входу источника 2 питания электродвигателя 8, рабочая частота вращения которого задается с помощью потенциометра (задатчика) 23. При этом частота вращения электродвигателя 8 уменьшится, вследствие чего упругие деформации кручения валопровода также уменьшаются. Действительно, известно, что при нереверсивном вращении удар, вследствие люфтов, т.е. из-за потери связи между электродвигателем и механизмом, возникает при соотношении ускорение двигателя при его торможении независимо от механизма; - ускорение механизма при его торможении независимо . от двигателя. Поскольку процесс выброса происходит при заданном направлении враще™ ния, то указанные соотношения, характеризующие условия возникновения удара, справедливы и при наличии упругих связей, при раскручивании вала в процессе выброса слитка в направлении обратного перекрытия зазоров. Следовательно, в процессе уменьшения частоты вращения электродвигателя, обеспечиваемой действием сигналов м и М , уменьшается разность производных частот вращения электродвигателя и механизма, описываемых выражением (1) . При уменьшении (исчезновении) импульса первой производной момента М возникает второй по счету импульс второй производной момента п импульс на кривой 3, фиг. 1). Полярность этого импульса противоположна полярности импульсов М (кривая 2) и первого по счету импульса М (импульс а на кривой 3, фиг. 1). Поэтому при воздействии импульсом второй производной момента М на систему 22 автоматического регулирования и, далее, на электродвигатель 8 частота вращения последнего кратковременно увеличится. Таким образом, частота вращения электродвигателя 8 в начале выброса слитка уменьшается, а в конце выброса кратковременно увеличивается (см. кривую 4 на фиг. 1). В результате, угол закручивания и механические напряжения в упругом валопроводе уменьшаются, поэтому величина раскрытия зазоров и ударов в элементах валопровода в направлении вращения в процессе выброса слитка уменьшается, либо полностью компенсируется. К моменту завершения выброса слит ка необходимо кратковременно увеличить частоту вращения электродвигате ля, потому что, в противном случае, после снятия упругих напряжений в Валопроводе и при дальнейшем уменьшении частоты вращения электродвигателя возможно возникновение удара из-за перекрытия зазора в направлении, противоположном вращению электродвигателя при прокатке. Указанное увеличение частоты вращения электродвигателя обеспечиваетс вторым по счету импульсом второй про изводной момента М (импульс S на кривой 3, фиг. 1), который может быт запомнен на необходимое время. Для того, чтобы ограничить время увеличения частоты вращения электродвигателя, с помощью диода 16 исключают прохождение в систему 22 регулирования частоты вращения положительного импульса первой Нроизводной момента М (на кривой 2, фиг. 1 не показан). Замыкающий контакт 19 датчика захвата исключает попадание сигналов с выхода усилителя 17 на вход системы 22 регулирования как до окончания процесса захвата, так и после полного выброса слитка, а размыкающий кон такт 20 датчика пробуксовки исключае ложное срабатывание устройства при налимиии пробуксовок. Источник 18 эталонного напряжения и задаваемая потенциометром 21 его уставка напряжения сравнения необходимы для того, чтобы исключить прохождение на вход системы 22 регулиро вания сигналов, пропорциональных низ кочастотным изменениям электродвижущей силы подшипниковых токов, имеющих место при прокатке. Рассмотренный спЬсоб и реализующе его устройство применимы как для гру левого привода валков, показанного на фиг. 2, так и для индивидуального электропривода валков. И8 Таким образом, предлагаемое техническое решение позволяет улучшить работу механо- и электрооборудования за счет уменьшения ударов в элементах линии валопровода клети при выбросеслитка, когда из-за влияния сил упругости и наличия зазоров наступает разрыв контактной поверхности с одной стороны и восстановление его с другой стороны сопряженных кинематических элементов валопровода. Формула изобретения 1.Способ уменьшения ударов в кинематической линии клети прокатного стана, заключающийся в том, что измеряют механическую нагрузку во вращающихся частях линии клети, сравнивают ее со значением нагрузки,- измеренным на электродвигателе, полученную разность сравнивают с заданным значением и о.брабатывают их отклонение воздействием на систему управления приводным- электродвигателем, отли чающи йся тем, что, с целью уменьшения механических напряжений в валопроводе и повышения быстродействия и надежности обработки управляющих воздействий, дополнительно дважды дифференцируют при выбросе слитка значения механического момента в валопроводе, сравнивают значения производных механического момента с эталонным значением, уменьшают частоту вращения прокатного электродвигателя на время действия первой производной механического момента, а затем увеличивают частоту вращения электродвигателя на время действия второй производной механичесжого момента в валопроводе, обрабатывая отклонение сравниваемых значений механических моментов воздействием на систему автоматического регулирования частоты вращения прокатного электродви гателя. 2.Устройство для осуществления способа по п. 1, содержащее валки, шестеренную клеть, прокатные электродвигатели, суммирующий усилитель, источник эталонного напряжения сравнения и систему управления приводного прокатного электродвигателя, причем первый выход суммирующего усилителя через источник опорного напряжения соединен с первым входом системы управления приводным прокатным электродвигателем, отли чающеес я тем, что оно дополнительно содержит заземленные и изолированный подшипники прокатного электродвигателя, контуры первичного и вторичного дифференцирования электродвижущей силы подшипников токов прокатного электродвигателя, диод, источник питания электродвигателя, контакты датчика захвата и датчика пробуксовки, причем входы контуров первичного и вторичного дифференцирования соединены с заземленным и изолированным подшипниками прокатного электродвигателя, выход контура первичного дифференцирования - через диод, а выход
контура вторичного дифференцирования непосредственно соединен с входом суммирующего усилителя, второй выход которого через источник опорногб напряжения, замыкающий контакт датчика захвата и размыкающий контакт датчика пробуксовки соединен со вторым входом системы управления приводным прокатным электродвигателем, выход которой соединен с входом его источника питания.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 389856, кл. В 21 В 37/00, 1972 (прототип).