1
Изобретение относится к контрольноизмерительной технике, предназначено для измерения углов наклона объектов относительно горизонтальной плоскости при строительных работах, а также при бурении наклонных скважин.
Известны устройства для измерения углов наклона и поворота объекта с индукционным преобразователем 1.
Наиболее близки к предлагаемому индукционные датчики угла наклона, содержащие маятник в виде полуцилиндра, возбуждающую катушку, индуктор, выполненный составным в виде двух плоских кольцевых катущек, а также измерительные катущки в виде полуколец, которые помещены между катушками индуктора. Оси индуктора, измерительных катушек и ось вращения маятника совпадают 2.
Устройство работает только при угле наклона оси маятника к горизонту не более 30°. Для одновременного измерения углов наклона в двух взаимно перпендикулярных плоскостях необходимы два датчика, причем угол наклона не должен превышать 30°.
Цель изобретения - расширение рабочего диапазона при измерении углов в пространстве.
Цель эта достигается тем, что в известном индукционном датчике угла наклона маятник, подвешенный на кардановом подвесе, выполнен в виде полусферы, на внешней стороне которой расположен основной индуктор с измерительными катушками, а на внутренней - дополнительный индуктор с измерительными катушками, причем плоскости расположения индукторов взаимно перпендикулярны.
В месте перекрещивания индукторов они разделены металлом маятника, и это исключает взаимное воздействие магнитных полей одной измерительной системы на другую.
Толщина маятника - несколько миллиметров. Устройство позволяет увеличения габаритов измерять углы одновременно в двух взаимно перпендикулярных плоскостях в диапазоне ± 85°.
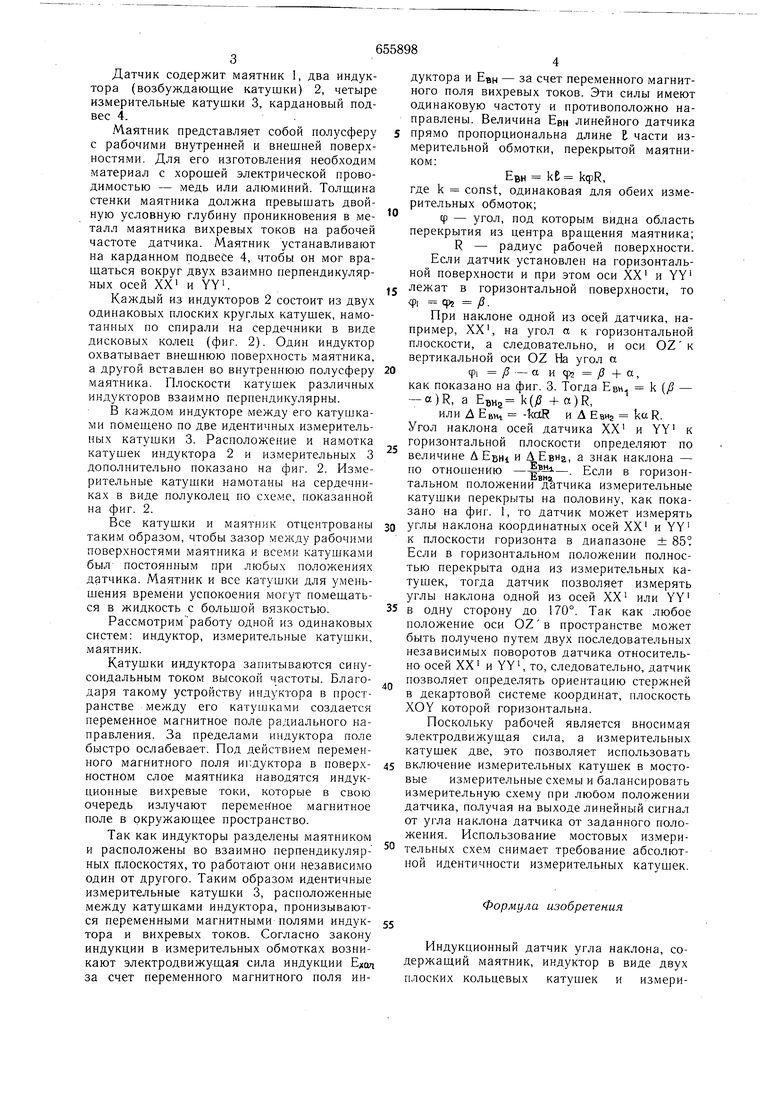
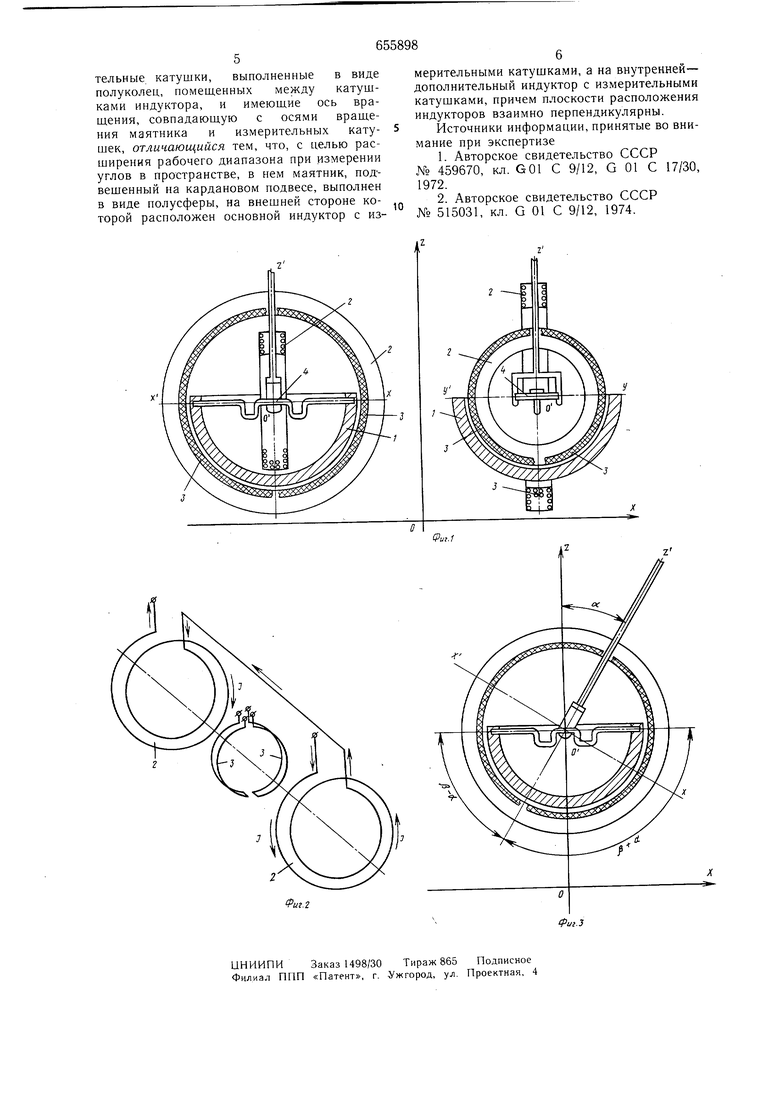
На фиг. 1 приведена принципиальная схема устройства; на фиг. 2 - схема намотки возбуждающих и измерительных катушек; фиг. 3 поясняет принцип измерения углов наклона. Датчик содержит маятник 1, два индуктора (возбуждающие катушки) 2, четыре измерительные катушки 3, кардановый подвес 4. Маятник представляет собой полусферу с рабочими внутренней и внешней поверхностями. Для его изготовления необходим материал с хорошей электрической проводимостью - медь или алюминий. Толщина стенки маятника должна превышать двойную условную глубину проникновения в металл маятника вихревых токов на рабочей частоте датчика. Маятник устанавливают на карданном подвесе 4, чтобы он мог вращаться вокруг двух взаимно перпендикулярных осей XX и YY. Каждый из индукторов 2 состоит из двух одинаковых плоских круглых катушек, намотанных по спирали на сердечники в виде дисковых колеп (фиг. 2). Один индуктор охватывает внешнюю поверхность маятника, а другой вставлен во внутреннюю полусферу маятника. Плоскости катушек различных индукторов взаимно перпендикулярны. В каждом индукторе .между его катушками помещено по две идентичных измерительных катущки 3. Расположение и намотка катушек индуктора 2 и измерительных 3 дополнительно показано на фиг. 2. Измерительные катущки намотаны на сердечниках в виде полуколец по схеме, показанной на фиг. 2. Все катущки и маятник отцентрованы таким образо.м, чтобы зазор между рабочи.ми поверхностями маятника и всеми катущками был постоянным при любых положениях датчика. Маятник и все катушки для уменьшения времени успокоения могут помещаться в жидкость с большой вязкостью. Рассмотримработу одной из одинаковых систем: индуктор, измерительные катушки, маятник. Катушки индуктора запитываются синусоидальным током высокой частоты. Благодаря такому устройству индуктора в пространстве между его катушками создается переменное магнитное поле радиального направления. За пределами индуктора поле быстро ослабевает. Под действием переменного магнитного поля индуктора в поверхностном слое маятника наводятся индукционные вихревые токи, которые в свою очередь излучают переменное магнитное поле в окружающее пространство. Так как индукторы разделены маятником и расположены во взаимно перпендикулярных плоскостях, то работают они независимо один от другого. Таким образом идентичные измерительные катушки 3, расположенные между катущками индуктора, пронизываются неременными магнитными полями индуктора и вихревых токов. Согласно закону индукции в измерительных обмотках возникают электродвижущая сила индукции за счет переменного магнитного поля индуктора и ЕВН - за счет переменного магнитного поля вихревых токов. Эти силы имеют одинаковую частоту и противоположно направлены. Величина ЕВН линейного датчика прямо пропорциональна длине Е части измерительной обмотки, перекрытой маятником:ЕВН ke kфR, где k const, одинаковая для обеих измерительных обмоток; Ф - угол, под которым видна область перекрытия из центра вращения маятника; R - радиус рабочей поверхности. Если датчик установлен на горизонтальной поверхности и при этом оси XX и YY лежат в горизонтальной поверхности, то fi qp /. При наклоне одной из осей датчика, например, XX, на угол о к горизонтальной плоскости, а следовательно, и оси OZ к вертикальной оси OZ На угол сх Ф1 / - а и /3 + а., как показано на фиг. 3. Тогда ЕВН- k (уЗ - -a)R, а Евнг (ft +a)R, или Д EBHI -koR и А Евнд ka R. Угол наклона осей датчика XX и YY к горизонтальной плоскости определяют по величине Д EBHI и АЕвна, а знак наклона - по отнощению --Мвьл-. Если в горизониВНа. тальном положении датчика измерительные катущки перекрыты на половину, как показано на фиг. 1, то датчик может измерять углы наклона координатных осей XX и YY к плоскости горизонта в диапазоне ± 85° Если в горизонтальном положении полностью перекрыта одна из измерительных катушек, тогда датчик позволяет измерять углы наклона одной из осей XX или YY в одну сторону до 170°. Так как любое положение оси OZ в пространстве может быть получено путем двух последовательных независимых поворотов датчика относительно осей XX и YY, то, следовательно, датчик позволяет определять ориентацию стержней в декартовой системе координат, плоскость XOY которой горизонтальна. Поскольку рабочей является вносимая электродвижущая сила, а измерительных катушек две, это позволяет использовать включение измерительных катушек в мостовые измерительные схемы и балансировать измерительную схему при любом положении датчика, получая на выходе линейный сигнал от угла наклона датчика от заданного положения. Использование мостовых измерительных схем снимает требование абсолютной идентичности измерительных катушек. Формула изобретения Индукционный датчик угла наклона, содержащий маятник, индуктор в виде двух плоских кольцевых катушек и измери
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик крена | 1974 |
|
SU515031A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2319157C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2006 |
|
RU2302006C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ТЕЧЕНИЯ | 1991 |
|
RU2050547C1 |
| Устройство для измерения параметров ориентации троса геофизического прибора | 1985 |
|
SU1435940A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2285931C1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1968 |
|
SU222309A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 2005 |
|
RU2306529C2 |
