Изобретение относится к измерительной технике и может быть использовано для создания средств измерения координат, скорости и угловых величин объекта в автоматических схемах управления, в геомагнитной навигации, в прецизионном машиностроении и приборостроении и т.д.
Известно устройство для дистанционного определения положения объекта, реализующее способ определения магнитного момента дипольного источника поля по измеренным параметрам магнитного поля в каждой из трех выбранных точек пространства [1] , которое состоит из трех трехкомпонентных магниточувствительных датчика, трех усилительно-преобразовательных блоков, первые входы которых подключены к выходам соответствующих датчиков, а первые выходы подключены к соответствующим первым входам этих датчиков, трех генераторов переменной ЭДС, первые входы которых подключены к соответствующим вторым входам датчиков, а вторые выходы подключены к соответствующим вторым входам усилительно-преобразовательных блоков, вычислительного блока, вход которого подключен к вторым выходам усилительно-преобразовательных блоков, а выход подключен к третьим входам датчиков, и дипольного источника постоянного магнитного поля, например, в виде намагниченного объекта. При этом каждый усилительно-преобразовательный блок, подключенный к соответствующему трехкомпонентному датчику, состоит из трех каналов, каждый из которых содержит избирательный усилитель и синхронный детектор. Электрически связанные между собой трехкомпонентный датчик, усилительно-преобразовательный блок и генератор переменной ЭДС образуют электронный блок, поэтому известное устройство содержит три электронных блока.
Известное устройство работает следующим образом.
На вторые входы датчиков подаются с первых выходов соответствующих генераторов переменные ЭДС, возбуждающие датчики. В результате этого на выходе каждого из датчиков появляются три ЭДС второй гармоники, каждая из которых пропорциональна одной из трех компонент магнитного поля, созданного дипольным источником и внешним магнитным полем, в частности геомагнитным полем и магнитным полем промышленных помех. Выходные сигналы с датчиков усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках, поэтому выходные сигналы с каждого усилительно-преобразовательного блока пропорциональны трем компонентам вектора магнитной продукции. Для детектирования сигналов на вторые входы каждого усилительно-преобразовательного блока подается переменное напряжение с вторых выходов соответствующих генераторов переменной ЭДС. Выходные сигналы с первых выходов усилительно-преобразовательных блоков подаются на первые входы соответствующих датчиков, обеспечивая отрицательную связь по измеряемым составляющим векторов магнитной индукции. Выходные сигналы с усилительно-преобразовательных блоков подаются на входы вычислительного блока. В вычислительном блоке осуществляется определение компонент однородного магнитного поля, координат и магнитного момента дипольного источника, а также определение направляющих косинусов вектора магнитного момента этого источника. Направление вектора магнитного момента дипольного источника поля жестко связано с намагниченностью объекта этого источника (Чернышев Е. Т., Чечурина Е. Н., Чернышева Е. Н., Студенцов Н. В. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов, 1969, с. 41-42), поэтому направляющие косинусы вектора магнитного момента дипольного источника поля определяют угловое положение этого источника. Сигналы, пропорциональные компонентам вектора однородного магнитного поля, поступают с выходов вычислительного блока на соответствующий датчик, осуществляя компенсацию однородного магнитного поля в объеме каждого из датчиков.
Известное устройство осуществляет измерение разностей проекций векторов магнитной индукции, созданной дипольным источником постоянного магнитного поля на фоне магнитного поля промышленных помех и геомагнитного поля. Магнитное поле промышленных помех и геомагнитное поле могут быть более на два порядка, превышать магнитное поле дипольного источника в выбранных местах расположения датчиков. В данном устройстве отсутствует избирательность по полезному сигналу. Для измерения разностей проекций векторов магнитной индукции дипольного источника воспринимают неоднородное внешнее магнитное поле, например магнитное поле промышленных помех, как полезный сигнал. Все это приводит к снижению точности измерения разностей проекций векторов магнитной индукции, а следовательно, и к снижению точности определения положения магнитного момента дипольного источника поля, а также объекта, на котором расположен источник.
Известно также устройство для определения положения объекта, в частности углового положения объекта [2, с. 145-147, рис. 53], которое по совокупности существенных признаков наиболее близко к предлагаемому и принято за прототип. Известное устройство состоит из двухкомпонентного датчика, образованного двумя однокомпонентными магниточувствительными датчиками, оси которых перпендикулярны, немагнитной горизонтальной площадки, на которой расположены эти датчики так, что их оси параллельны площадке двойного карданового подвеса, на котором расположена упомянутая площадка, объекта в виде полого цилиндра, к корпусу которого закреплен кардановый подвес с датчика, маятника, жестко связанного с горизонтальной площадкой, катушкой индуктивности, жестко связанной с объектом и охватывающей датчики, двух усилительно-преобразовательных блоков, первые входы которых подключены к выходам соответствующих датчиков, двух фильтров нижних частот, входы которых подключены к выходам соответствующих усилительно-преобразовательных блоков через регистрирующие приборы, а выходы подключены к первым входам соответствующих датчиков, двух синхронных детекторов низкой частоты, входы которых подключены к выходам соответствующих усилительно-преобразовательных блоков, двух генераторов переменной ЭДС и генератора низкой частоты. При этом первый выход каждого из генераторов переменной ЭДС подключен к второму входу соответствующего датчика, а второй выход каждого из этих генераторов подключен к второму входу соответствующего усилительно-преобразовательного блока. Первый выход генератора низкой частоты подключен к вторым входам синхронных детекторов, а два других выхода подключены к выводам катушки индуктивности.
Известное устройство работает следующим образом.
С помощью двойного карданового подвеса площадка с двумя датчиками находится в горизонтальном положении. Стабилизация площадки в горизонтальном положении осуществляется с помощью маятника, поэтому оба датчика реагируют только на горизонтальную составляющую магнитного поля. Катушка индуктивности, охватывающая оба датчика, жестко связана с корпусом цилиндрического тела. Ось катушки индуктивности перпендикулярна осям магниточувствительных датчиков, когда она, а значит, и ось цилиндрического объекта совпадают с вертикалью. В катушке индуктивности, подключенной к генератору низкой частоты, протекает низкочастотный ток, поэтому упомянутая катушка воспроизводит низкочастотное магнитное поле, на которое магниточувствительные датчики не реагируют, то есть переменное магнитное поле на них не действует, когда ось катушки совпадает с вертикалью. Если ось катушки индуктивности (ось цилиндрического объекта) отклонена от вертикали, то на датчики действует не только горизонтальная составляющая геомагнитного поля, но и переменное магнитное поле, воспроизводимое катушкой индуктивности. На вторые входы датчиков подаются с первых выходов соответствующих генераторов переменные ЭДС, возбуждающие эти датчики. В результате этого на выходе каждого из датчиков появляются ЭДС второй гармоники, каждая из которых пропорциональна горизонтальной составляющей геомагнитного поля и горизонтальной составляющей переменного магнитного поля, воспроизводимого катушкой индуктивности, когда ось цилиндрического объекта отклонена от вертикали. Выходные сигналы с датчиков усиливаются и детектируются в соответствующих усилительно-преобразовательных блоках, поэтому выходные сигналы с усилительно-преобразовательных блоков пропорциональны измеряемым компонентам магнитной индукции. Для детектирования сигналов на вторые входы каждого усилительно-преобразовательного блока подается переменное напряжение с вторых выходов соответствующих генераторов переменной ЭДС. При этом каждый усилительно-преобразовательный блок состоит из избирательного усилителя и синхронного детектора [2, с. 146, рис. 53, б]. Выходной сигнал с выхода каждого усилительно-преобразовательного блока подается через регистрирующий прибор (микроамперметр) и фильтр нижних частот на первый вход соответствующего датчика, обеспечивая тем самым отрицательную обратную связь по измеряемой горизонтальной составляющей геомагнитного поля. Фильтры нижних частот препятствуют прохождению сигналов, пропорциональных переменному магнитному полю, воспроизводимому катушкой индуктивности, на первые входы соответствующих датчиков. Поэтому токи в цепях обратной связи, измеряемые регистрирующими приборами, пропорциональны горизонтальным составляющим геомагнитного поля. Сигналы с выходов усилительно-преобразовательных блоков подаются на первые входы соответствующих синхронных детекторов. На вторые входы этих детекторов подается переменное напряжение с генератора низкой частоты, поэтому сигналы на выходе каждого синхронного детектора пропорциональны амплитуде горизонтальной составляющей переменного магнитного поля. По измеренным составляющим переменного и постоянного магнитного поля определяют угловое положение объекта, то есть определяют направление оси катушки индуктивности или оси цилиндрического объекта относительно выбранной системы координат [2, с. 146, 147, рис. 53, 54].
Известное устройство осуществляет измерение горизонтальной составляющей геомагнитного поля и горизонтальной составляющей переменного магнитного поля, воспроизводимого катушкой индуктивности. Вертикальная составляющая геомагнитного поля может составлять порядка 50000 нТл. Неортогональность магнитных осей датчиков к вертикальной составляющей геомагнитного поля приводит к погрешности измерения горизонтальных составляющих геомагнитного поля, а следовательно, к погрешности измерения углового положения объекта. Кроме того, вариации геомагнитного поля, которые при магнитных бурях могут достигать значений 1000 нТл (Логачев А. А., Захаров В. П. Магниторазведка. Л.: Недра, 1979, с. 30), также приводят к погрешности измерения горизонтальных составляющих геомагнитного поля, а значит, и к низкой точности определения углового положения объекта.
Наличие карданового подвеса и маятника в известном устройстве обеспечивает определение углового положения объекта только от горизонтальной плоскости в пределах более -90 и менее +90o. Известное устройство не обеспечивает определение угла поворота объекта вокруг оси этого объекта. Действительно, известное техническое решение обеспечивает определение только углового положения вертикальной оси цилиндрического объекта и не несет информацию об угле поворота этого объекта вокруг собственной оси ([2, с. 146, рис. 53, а, с. 147, рис. 54], формулы 168, 169). Следует также отметить, что известное устройство не обеспечивает определение местоположения объекта.
Задачей изобретения является создание устройства, обеспечивающего определение как углового положения, так и местоположение объекта с высокой точностью при наличии геомагнитного поля и промышленных магнитных помех при возможном изменении углового положения объекта в каждой из двух взаимно ортогональных плоскостях в пределах от 0 до 360o. Поставленная задача дистанционного определения положения объекта решается за счет измерения в одной, трех и четырех точках пространства составляющих магнитных векторов магнитной индукции, воспроизводимой тремя и шестью источниками переменных магнитных полей, в частности, катушками индуктивности.
Изобретение представляет собой четыре устройства для дистанционного определения положения объекта, связанных между собой настолько, что они образуют единый общий изобретательский замысел.
Предлагаемое устройство для дистанционного определения положения объекта (по первому варианту), содержащее магниточувствительный датчик, два усилительно-преобразовательных блока, из которых первый вход первого усилительно-преобразовательного блока подключен к первому выходу датчика, первый вход второго усилительно-преобразовательного блока подключен к второму выходу датчика, а выходы этих блоков являются выходами устройства, генератор переменных напряжений, первый выход которого подключен к вторым входам усилительно-преобразовательных блоков, и катушку индуктивности, выводы которой подключены к второму и третьему выходам генератора переменных напряжений, снабжено семью дополнительными усилительно-преобразовательными блоками и двумя дополнительными катушками индуктивности, оси которых перпендикулярны между собой и перпендикулярны оси основной катушки, первые входы первого и второго дополнительных блоков подключены к первому выходу датчика, первые входы третьего и четвертого дополнительных блоков подключены к второму выходу датчика, первые входы пятого, шестого и седьмого дополнительных блоков подключены к третьему выходу датчика, второй вход пятого дополнительного блока подключен к первому выходу генератора переменных напряжений, вторые входы первого, третьего и шестого дополнительных блоков подключены к четвертому выходу генератора переменных напряжений, вторые входы второго, четвертого и седьмого дополнительных блоков подключены к пятому выходу генератора переменных напряжений, выводы одной из дополнительных катушек подключены к шестому и седьмому выходам генератора переменных напряжений, а выводы второй дополнительной катушки подключены к восьмому и девятому выходам генератора переменных напряжений, при этом датчик выполнен трехкомпонентным и размещен на исследуемом объекте, все три катушки индуктивности выполнены в виде трехкомпонентного источника переменных магнитных полей, а выходы дополнительных усилительно-преобразовательных блоков являются выходами устройства.
Предлагаемое устройство для дистанционного определения положения объекта (по второму варианту), содержащее магниточувствительный датчик, два усилительно-преобразовательных блока, из которых первый вход первого усилительно-преобразовательного блока подключен к первому выходу датчика, первый вход второго усилительно-преобразовательного блока подключен к второму выходу датчика, а выходы этих блоков являются выходами устройства, генератор переменных напряжений, у которого первый выход подключен к вторым, второй выход - к третьим входам усилительно-преобразовательных блоков, а третий выход - к входу датчика, и катушку индуктивности, выводы которой подключены к четвертому и пятому выходам генератора переменных напряжений, снабжено семью дополнительными усилительно-преобразовательными блоками и двумя дополнительными катушками индуктивности, оси которых перпендикулярны между собой и перпендикулярны оси основной катушки, первые входы первого и второго дополнительных блоков подключены к первому выходу датчика, первые входы третьего и четвертого дополнительных блоков подключены к второму выходу датчика, первые входы пятого, шестого и седьмого дополнительных блоков подключены к третьему выходу датчика, второй вход пятого дополнительного блока подключен к первому выходу генератора переменных напряжений, вторые входы первого, третьего и шестого дополнительных блоков подключены к шестому выходу генератора переменных напряжений, вторые входы второго, четвертого и седьмого дополнительных блоков подключены к седьмому выходу генератора переменных напряжений, третьи входы дополнительных усилительно-преобразовательных блоков подключены к второму выходу генератора переменных напряжений, выводы одной из дополнительных катушек подключены к восьмому и девятому выходам генератора переменных напряжений, а выводы второй дополнительной катушки подключены к десятому и одиннадцатому выходам генератора переменных напряжений, при этом датчик выполнен трехкомпонентным и размещен на исследуемом объекте, все три катушки индуктивности выполнены в виде трехкомпонентного источника переменных магнитных полей, а выходы дополнительных усилительно-преобразовательных блоков являются выходами устройства.
Предлагаемое устройство для дистанционного определения положения объекта (по третьему варианту), содержащее магниточувствительный датчик, два усилительно-преобразовательных блока, из которых первый вход первого усилительно-преобразовательного блока подключен к первому выходу датчика, первый вход второго усилительно-преобразовательного блока подключен к второму выходу датчика, а выходы этих блоков являются выходами устройства, генератор переменных напряжений, первый выход которого подключен к вторым, входам усилительно-преобразовательных блоков, и катушку индуктивности, выводы которой подключены к второму и третьему выходам генератора переменных напряжений, снабжено двумя дополнительными магниточувствительными датчиками, двадцатью пятью дополнительными усилительно-преобразовательными блоками и двумя дополнительными катушками индуктивности, оси которых перпендикулярны между собой и оси основной катушки, первые входы первого и второго дополнительных блоков подключены к первому выходу основного датчика, первые входы третьего и четвертого дополнительных блоков подключены к второму выходу основного датчика, первые входы пятого, шестого и седьмого дополнительных блоков подключены к третьему выходу основного датчика, первые входы восьмого, девятого и десятого дополнительных блоков подключены к первому выходу первого дополнительного датчика, первые входы одиннадцатого, двенадцатого и тринадцатого дополнительных блоков подключены к второму выходу первого дополнительного датчика, первые входы четырнадцатого, пятнадцатого и шестнадцатого дополнительных блоков подключены к третьему выходу первого дополнительного датчика, первые входы семнадцатого, восемнадцатого и девятнадцатого дополнительных блоков подключены к первому выходу второго дополнительного датчика, первые входы двадцатого, двадцать первого и двадцать второго дополнительных блоков подключены к второму выходу второго дополнительного датчика, первые входы двадцать третьего, двадцать четвертого и двадцать пятого дополнительных блоков подключены к третьему выходу второго дополнительного датчика, вторые входы пятого, восьмого, одиннадцатого, четырнадцатого, семнадцатого, двадцатого и двадцать третьего дополнительных блоков подключены к первому выходу генератора переменных напряжений, вторые входы первого, третьего, шестого, девятого, двенадцатого, пятнадцатого, восемнадцатого, двадцать первого и двадцать четвертого дополнительных блоков подключены к четвертому выходу генератора переменных напряжений, вторые входы второго, четвертого, седьмого, десятого, тринадцатого, шестнадцатого, девятнадцатого, двадцать второго и двадцать пятого дополнительных блоков подключены к пятому выходу генератора переменных напряжений, выводы одной из дополнительных катушек подключены к шестому и седьмому выходам генератора переменных напряжений, а выводы второй дополнительной катушки подключены к восьмому и девятому выходам генератора переменных напряжений, при этом датчики выполнены трехкомпонентными, все катушки индуктивности размещены на исследуемом объекте, а выходы дополнительных усилительно-преобразовательных блоков являются выходами устройства, причем основная катушка с первой и второй дополнительными катушками выполнены в виде трехкомпонентного источника переменных магнитных полей.
Предлагаемое устройство для дистанционного определения положения объекта (по четвертому варианту), содержащее магниточувствительный датчик, два усилительно-преобразовательных блока, выходы которых являются выходами устройства, генератор переменных напряжений и катушку индуктивности, выводы которой подключены к первому и второму выходам генератора переменных напряжений, снабжено тремя дополнительными магниточувствительными датчиками, коммутатором, шестнадцатью дополнительными усилительно-преобразовательными блоками, выходы которых являются выходами устройства, и пятью дополнительными катушками индуктивности, из которых оси первой и второй дополнительных катушек перпендикулярны между собой и перпендикулярны оси основной катушки индуктивности, а оси третьей, четвертой и пятой дополнительных катушек взаимно ортогональны, при этом все четыре датчика выполнены трехкомпонентными, каждый из двенадцати входов коммутатора подключен к одному из выходов четырех датчиков, вход первого основного и входы первого, второго, третьего, четвертого, пятого дополнительных усилительно-преобразовательных блоков подключены к первому выходу коммутатора, вход второго основного и входы шестого, седьмого, восьмого, девятого, десятого дополнительных усилительно-преобразовательных блоков подключены к второму выходу коммутатора, входы одиннадцатого, двенадцатого, тринадцатого, четырнадцатого, пятнадцатого и шестнадцатого дополнительных усилительно-преобразовательных блоков подключены к третьему выходу коммутатора выводы первой дополнительной катушки подключены к третьему и четвертому выходам генератора переменных напряжений, выводы второй дополнительной катушки подключены к пятому и шестому выходам генератора переменных напряжений, выводы третьей дополнительной катушки подключены к седьмому и восьмому выходам генератора переменных напряжений, выводы четвертой дополнительной катушки подключены к девятому и десятому выходам генератора переменных напряжений, выводы пятой дополнительной катушки подключены к одиннадцатому и двенадцатому выходам генератора переменных напряжений, причем основная катушка первой и второй дополнительными катушками, а также третья, четвертая и пятая дополнительные катушки выполнены в виде двух трехкомпонентных источников переменных магнитных полей, которые с генератором переменных напряжений размещены на исследуемом объекте.
Применение в предлагаемом техническом решении по первому и второму вариантам трехкомпонентного магниточувствительного датчика, девяти усилительно-преобразовательных блоков, генератора переменных напряжений, включенных между собой соответствующим образом, а также трех катушек индуктивности с взаимно ортогональными осями, подключенными к соответствующим выходам генератора переменных напряжений, и измерение составляющих трех векторов магнитной индукции, созданной катушками индуктивности, обеспечивает определение местоположения (координат) и углового положения датчика, расположенного на объекте, а следовательно, и определение координат и углового положения объекта при размещении датчика в известном октанте системы координат, образованной осями катушек, выполненными в виде трехкомпонентного источника переменных магнитных полей. При этом определение координат и углового положения датчика, а следовательно, и объекта осуществляется в пределах от 0 до 360o при вращении объекта вокруг произвольно выбранной оси. Кроме того, на объекте может быть размещен либо датчик, либо катушки.
Применение в предлагаемом техническом решении по третьему варианту трех трехкомпонентных магниточувствительных датчиков, двадцати семи усилительно-преобразовательных блоков и генератора переменных напряжений, включенных между собой соответствующим образом, а также трех катушек индуктивности с взаимно ортогональными осями, подключенными к соответствующим выходам генератора переменных напряжений, и измерение составляющих девяти векторов магнитной индукции, созданной катушками индуктивности, обеспечивает определение координат и углового положения осей катушки индуктивности, расположенных на объекте, а следовательно, и определение координат и углового положения объекта в выбранной системе координат, например в декартовой системе координат, оси которой коллинеарны осям одного из датчиков. При этом определение координат и углового положения упомянутого трехкомпонентного источника, а следовательно, и объекта осуществляется в пределах от 0 до 360o при вращении объекта вокруг произвольно выбранной оси и при отсутствии сведений в каком октанте системы координат находится объект. Кроме того, на объекте могут быть размещены либо катушки, либо датчики.
Применение в предлагаемом техническом решении по четвертому варианту четырех трехкомпонентных магниточувствительных датчиков, восемнадцати усилительно-преобразовательных блоков, генератора переменных напряжений и коммутатора, включенных между собой соответствующим образом, а также шести катушек индуктивности, выполненных в виде двух трехкомпонентных источников переменных магнитных полей, подключенных к соответствующим выходам генератора переменных напряжений, и измерение составляющих векторов магнитной индукции, созданных катушками индуктивности, обеспечивает определение координат двух трехкомпонентных источников переменных магнитных полей, созданных катушками индуктивности и расположенных на объекте, а следовательно, и определение координат и углового положения объекта в выбранной системе координат, например в декартовой системе координат, оси которой коллинеарны осям одного из датчиков. При этом определение координат двух трехкомпонентных источников переменных магнитных полей, расположенных на объекте, а следовательно, определение координат и углового положения объекта осуществляется в пределах от 0 до 360o при вращении объекта вокруг произвольно выбранной оси и при отсутствии сведений в каком октанте системы координат находится объект. Следует заметить, что между датчиками, коммутатором и усилительно-преобразовательными блоками, образующими приемную часть предлагаемого устройства, и генератором переменных напряжений с катушками индуктивности, образующими передающую часть упомянутого устройства, отсутствует контактная (проводная) связь. Это обеспечивает определение положения объекта (местоположение и угловое положение объекта) там, где контактную связь с объектом и расположенными на нем генератором с катушками индуктивности сложно или невозможно осуществить. Кроме того, на объекте могут быть размещены либо генератор с катушками, либо датчики, усилительно-образовательные блоки и коммутатор.
Таким образом, технический результат предлагаемого устройства для дистанционного определения положения объекта выражается в определении местоположения (координат) и углового положения объекта при его перемещении и вращении в пределах от 0 до 360o вокруг произвольно выбранной оси при наличии и отсутствии контакта с объектом.
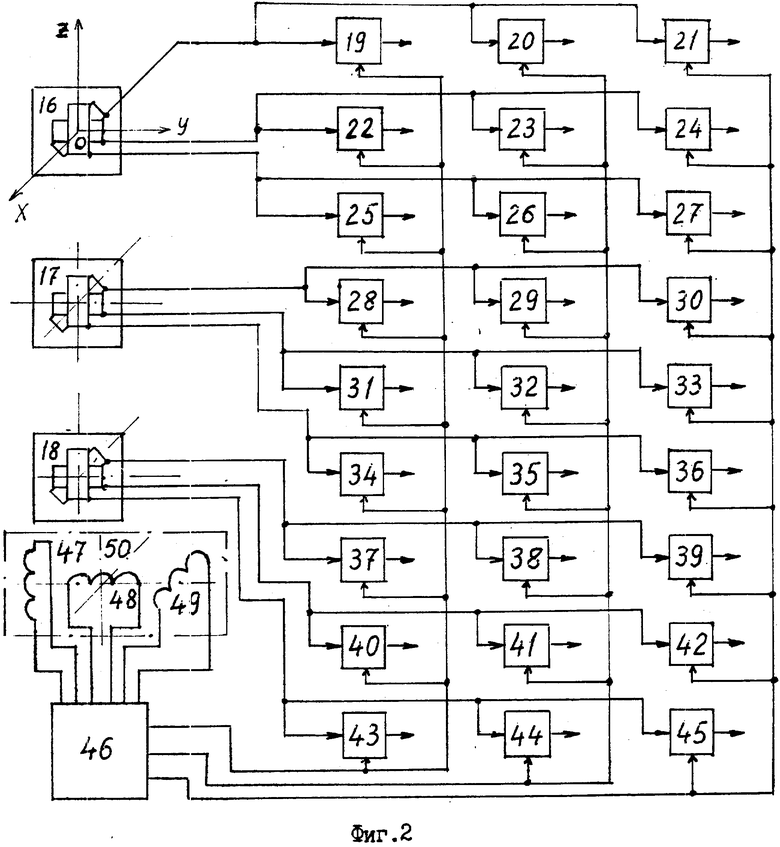
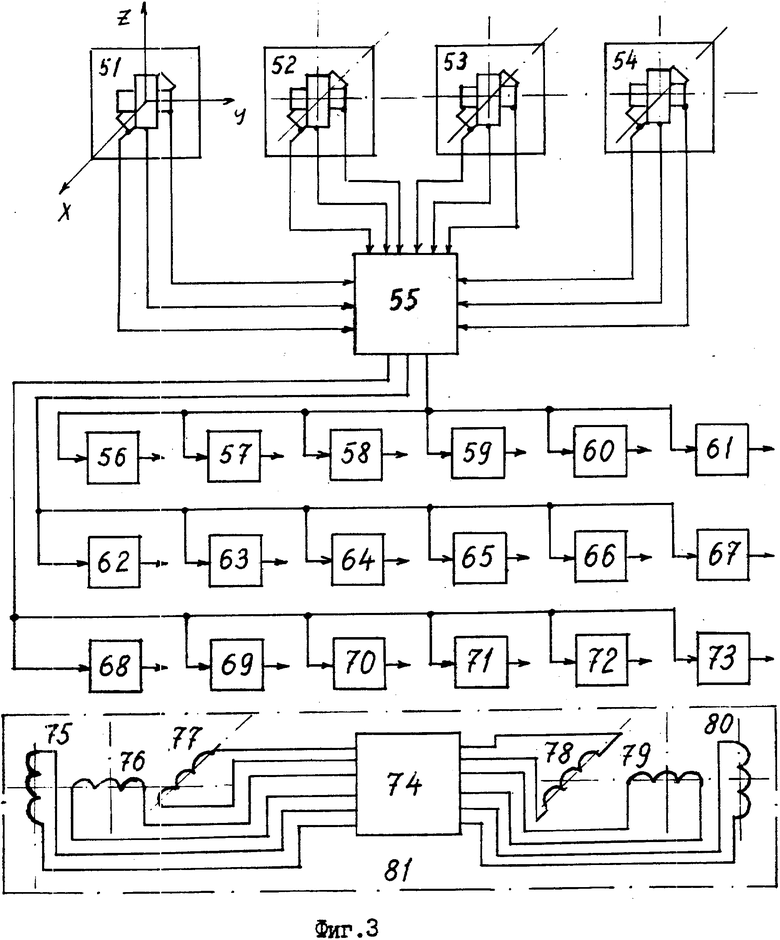
На фиг. 1 изображена структурная схема устройства для дистанционного определения положения объекта по первому и второму вариантам; на фиг. 2 - структурная схема устройства для дистанционного определения положения объекта по третьему варианту; на фиг. 3 - структурная схема устройства для дистанционного определения положения объекта по четвертому варианту.
Предлагаемое устройство для дистанционного определения положения объекта по первому варианту (фиг. 1) состоит из трехкомпонентного магниточувствительного датчика 1, девяти усилительно-преобразовательных блоков 2-10, выходы которых являются выходами устройства, генератора переменных напряжений 11 и трех катушек индуктивности 12-14 с взаимно ортогональными осями, выполненных в виде трехкомпонентного источника переменных магнитных полей, при этом датчик 1 размещен на объекте 15. Первый выход датчика 1 подключен к первым входам блоков 2, 3 и 4, второй выход датчика 1 подключен к первым входам блоков 5, 6 и 7, третий выход датчика 1 подключен к первым входам блоков 8, 9 и 10, вторые входы блоков 2, 5 и 8 подключены к первому выходу генератора 11, вторые входы блоков 3, 6 и 9 подключены к четвертому выходу генератора 11, вторые входы блоков 4, 7 и 10 подключены к пятому выходу генератора 11, выводы катушки 12 подключены к второму и третьему выходам генератора 11, выводы катушки 13 подключены к шестому и седьмому выходам генератора 11 и выводы катушки 14 подключены к восьмому и девятому выходам генератора 11.
Предлагаемое устройство для дистанционного определения положения объекта по второму варианту (фиг. 1) состоит из трехкомпонентного магниточувствительного датчика 1, девяти усилительно-преобразовательных блоков 2-10, выходы которых являются выходами устройства, генератора переменных напряжений 11 и трех катушек индуктивности 12-14 с взаимно ортогональными осями, выполненных в виде трехкомпонентного источника переменных магнитных полей, при этом датчик 1 размещен на объекте 15. Первый выход датчика 1 подключен к первым входам блоков 2-4, второй выход датчика 1 подключен к первым входам блоков 5-7, третий выход датчика 1 подключен к первым входам блоков 8-10, вторые входы блоков 2, 5 и 8 подключены к первому выходу генератора 11, вторые входы блоков 3, 6 и 9 подключены к шестому выходу генератора 11, вторые входы блоков 4, 7 и 10 подключены к седьмому выходу генератора 11, а третьи входы блоков 2-10 подключены к второму выходу A генератора 11. Выводы катушки 12 подключены к четвертому и пятому выходам генератора 11, выводы катушки 13 подключены к восьмому и девятому выходам генератора 11, выводы катушки 14 подключены к десятому и одиннадцатому выходам генератора 11, а третий выход C генератора 11 подключен к входу датчика 1.
Предлагаемое устройство для дистанционного определения положения объекта по третьему варианту (фиг. 2) состоит из трех трехкомпонентных магниточувствительных датчиков 16, 17 и 18, двадцати семи усилительно-преобразовательных блоков 19-45, выходы которых являются выходами устройства, генератора переменных напряжений 46 и трех катушек индуктивности 47, 48 и 49 с взаимно ортогональными осями, размещенных на объекте 50. Первый выход датчика 16 подключен к первым входам блоков 19-21, второй выход датчика 16 подключен к первым входам блоков 22-24, третий выход датчика 16 подключен к первым входам блоков 25-27, первый выход датчика 17 подключен к первым входам блоков 28-30, второй выход датчика 17 подключен к первым входам блоков 31-33, третий выход датчика 17 подключен к первым входам блоков 34-36, первый выход датчика 18 подключен к первым входам блоков 37-39, второй выход датчика 18 подключен к первым входам блоков 40-42, третий выход датчика 18 подключен к первым входам блоков 43-45, вторые входы блоков 19, 22, 25, 28, 31, 34, 37, 40 и 43 подключены к первому выходу генератора 46, вторые входы блоков 20, 23, 26, 29, 32, 35, 38, 41 и 44 подключены к четвертому выходу генератора 46, вторые входы блоков 21, 24, 27, 30, 33, 36, 39, 42 и 45 подключены к пятому выходу генератора 46, выводы катушки 47 подключены к второму и третьему выходам генератора 46, выводы катушки 48 подключены к шестому и седьмому выходам генератора 46 и выводы катушки 49 подключены к восьмому и девятому выходам генератора 46.
Предлагаемое устройство для дистанционного определения положения объекта по четвертому варианту состоит из четырех трехкомпонентных магниточувствительных датчиков 51-54, коммутатора 55, восемнадцати усилительно-преобразовательных блоков 56-73, генератора переменных напряжений 74 и шести катушек индуктивности 75-80, выводы которых подключены к соответствующим выходам генератора 74. Каждый из двенадцати входов коммутатора 55 подключен к одному из выходов датчиков 51-54, входы блоков 56-61 подключены к первому выходу коммутатора 55, входы блоков 62-67 подключены к второму выходу коммутатора 55, входы блоков 68-73 подключены к третьему выходу коммутатора 55, а выходы блоков 56-73 являются выходами устройства. Оси катушек 75, 76 и 77 взаимно ортогональны, и оси катушек 78, 79 и 80 тоже взаимно ортогональны, при этом оси катушек 75-77 могут быть и неколлинеарны осям катушек 78-80. Кроме того, катушки 75-77, а также катушки 78-80 выполнены в виде двух трехкомпонентных источников переменных магнитных полей, которые с генератором 74 размещены на исследуемом объекте 81.
Предлагаемое устройство для дистанционного определения положения объекта по первому варианту работает следующим образом.
В катушках 12-14 (фиг. 1), подключенных к генератору 11, протекают переменные токи разных частот. В результате этого катушки 12-14 воспроизводят переменные магнитные поля с частотами f1, f2, f3. В трехкомпонентном датчике 1 (например, в пассивном индукционном датчике) индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 12-14 с соответствующими частотами f1, f2, f3. Эти ЭДС усиливаются и детектируются блоками 2-10, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы блоков 2-10 подаются опорные напряжения с соответствующими частотами f1, f2, f3 с генератора 11, а на первые входы этих блоков 2-10 подаются с соответствующих выходов датчика 1 переменные ЭДС. В результате этого на выходах блоков 2-10 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданных катушками 12-14. Поэтому выходные сигналы с блоков 2-10 будут пропорциональны следующим значениям проекций векторов магнитной индукции, созданной катушками 12-14: проекциям векторов магнитной индукции  на ось O'X' с выходов блоков 2-4, подключенных к первому выходу датчика 1; проекциям векторов магнитной индукции
на ось O'X' с выходов блоков 2-4, подключенных к первому выходу датчика 1; проекциям векторов магнитной индукции  на ось O'Y' с выходов блоков 5-7, подключенных к второму выходу датчика 1; проекциям векторов магнитной индукции
на ось O'Y' с выходов блоков 5-7, подключенных к второму выходу датчика 1; проекциям векторов магнитной индукции  на ось O'Z' с выходов блоков 8-10, подключенных к третьему выходу датчика 1, где O'X', O'Y', O'Z' - оси системы координат O'X'Y'Z', жестко связанные с осями датчика 1, а значит, и с объектом 15.
на ось O'Z' с выходов блоков 8-10, подключенных к третьему выходу датчика 1, где O'X', O'Y', O'Z' - оси системы координат O'X'Y'Z', жестко связанные с осями датчика 1, а значит, и с объектом 15.
Измеряемое датчиком 1 (фиг. 1) магнитное поле, созданное катушками 12-14, можно аппроксимировать магнитным полем диполя, если максимальные линейные размеры катушек 12-14 существенно меньше расстояния между катушками и датчиком 1 или при условии, что для каждой катушки 12-14 отношение ее длины к диаметру равно  (Афанасьев Ю. В., Студенцов Н. В., Хорев В. Н. и др. Средства измерения параметров магнитных полей. Л.: Энергия, 1979, с. 68). В таком случае, при магнитном моменте каждой из катушек 12-14 равном M расстояние r1 от датчика 1 до трехкомпонентного источника переменных полей (катушек 12-14) и координаты датчика 1 в декартовой системе координат OXYZ, оси которой совпадают с осями катушек 12-14, можно представить в следующем виде:
(Афанасьев Ю. В., Студенцов Н. В., Хорев В. Н. и др. Средства измерения параметров магнитных полей. Л.: Энергия, 1979, с. 68). В таком случае, при магнитном моменте каждой из катушек 12-14 равном M расстояние r1 от датчика 1 до трехкомпонентного источника переменных полей (катушек 12-14) и координаты датчика 1 в декартовой системе координат OXYZ, оси которой совпадают с осями катушек 12-14, можно представить в следующем виде:
x, y, z - координаты датчика 1.
Знаки x, y, z определяются октантом расположения датчика 1 в системе координат OXYZ.
Направляющие косинусы l1, l2, l3, m1, m2, m3, n1, n2, n3 (Ефимов Н. В. Квадратичные формы и матрицы. М.: Наука, 1975), несущие информацию об угловом положении датчика 1 (фиг. 1), а следовательно, и объекта 15 являются решением следующих трех систем уравнений:
Девять направляющих косинусов l1, l2, l3, m1, m2, m3, n1, n2, n3 определяют угловое положение системы координат O'X'Y'Z', жестко связанной с датчиком 1 (фиг. 1), а значит, и с объектом 15 в опорной системе координат OXYZ, поэтому направляющие косинусы определяют угловое положение объекта 15 в системе координат OXYZ при смещении объекта 15 в известном октанте и вращении его вокруг произвольно выбранной оси в пределах от 0 до 360o.
Предлагаемое устройство для дистанционного определения положения объекта по второму варианту работает следующим образом.
На вход трехкомпонентного датчика 1 (фиг. 1), например, феррозонда подается переменное напряжение с генератора 11, перемагничивающее магниточувствительный элемент датчика 1. В результате этого на выходах датчика 1 появляются ЭДС вторых гармоник, пропорциональные проекциям вектора магнитной индукции на оси датчика 1 (Афанасьев Ю. В. Феррозондовые приборы. Л.: Энергоатомиздат, 1986). На датчик 1 действуют геомагнитное поле и переменные магнитные поля с частотами f1, f2, f3, воспроизводимые катушками 12-14. Для этого выводы катушек 12-14 подключены к соответствующим выходам генератора 11. Частота напряжения подводимого к датчику 1 от генератора 11 много больше каждой из частот напряжений, подводимых к катушкам 12-14. Выходные сигналы усиливаются и детектируются в блоках 2-10. Для детектирования сигналов блоками 2-10 с второго выхода генератора 11 подается переменное напряжение на третьи входы блоков 2-10 с частотой, в два раза превышающей частоту напряжения, подающегося на датчик 1 (Афанасьев Ю. В. Феррозондовые приборы. Л.: Энергоатомиздат, 1986) и переменные напряжения с частотами f1, f2, f3 на вторые входы блоков 2-10. В результате этого на выходах блоков 2-10 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданных только катушками 12-14. Далее осуществляется определение координат и углового положения объекта 15 по измеренным составляющим векторов магнитной индукции также, как и для устройства по первому варианту.
В предлагаемом устройстве по второму варианту используется активный датчик, в частности феррозонд, поэтому данное устройство обеспечивает дистанционное определение положения объекта на переменных магнитных полях, воспроизводимых катушками 12-14 (фиг. 1) в диапазоне частот от десятых долей герц до единиц килогерц. Предлагаемое же устройство по первому варианту при габаритах трехкомпонентного датчика, соизмеримого с габаритами датчика устройства по второму варианту, обеспечивает дистанционное определение положения объекта в диапазоне частот от единиц килогерц и выше. Таким образом, техническое решение по второму варианту, как и техническое решение по первому варианту, обеспечивает определение координат и углового положения объекта 15 (фиг. 1) в системе координат OXYZ при смещении и вращении объекта вокруг произвольно выбранной оси в пределах от 0 до 360o.
Предлагаемое устройство для дистанционного определения положения объекта по третьему варианту работает следующим образом.
В катушках 47-49 (фиг. 2), подключенных к генератору 46, протекают переменные токи разных частот. В результате этого катушки 47-49 воспроизводят переменные магнитные поля с частотами f1, f2, f3. В трехкомпонентных датчиках 16-18 (например, в пассивных индукционных датчиках) по каждой компоненте индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 47-49 с соответствующими частотами f1, f2, f3. Эти ЭДС усиливаются и детектируются блоками 19-45, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы блоков 19-45 подаются опорные напряжения с соответствующими частотами f1, f2, f3 с генератора 46, а на первые входы этих блоков подаются с соответствующих выходов датчиков 16-18 переменные ЭДС. В результате этого на выходах блоков 19-45 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданных катушками 47-49. Поэтому выходные сигналы с блоков 19-45 будут пропорциональны следующим значениям проекций векторов магнитной индукции, созданной катушками 47-49: проекциям векторов магнитной индукции  на ось OX с выходов блоков 19-21, подключенных к первому выходу датчика 16; проекциям векторов магнитной индукции
на ось OX с выходов блоков 19-21, подключенных к первому выходу датчика 16; проекциям векторов магнитной индукции  на ось OY с выходов блоков 22-24, подключенных к второму выходу датчика 16; проекциям векторов магнитной индукции
на ось OY с выходов блоков 22-24, подключенных к второму выходу датчика 16; проекциям векторов магнитной индукции  на ось OZ с выходов блоков 25-27, подключенных к третьему выходу датчика 16; проекциям векторов магнитной индукции
на ось OZ с выходов блоков 25-27, подключенных к третьему выходу датчика 16; проекциям векторов магнитной индукции  на ось OX с выходов блоков 28-30, подключенных к первому выходу датчика 17; проекциям векторов магнитной индукции
на ось OX с выходов блоков 28-30, подключенных к первому выходу датчика 17; проекциям векторов магнитной индукции  на ось OY с выходов блоков 31-33, подключенных к второму выходу датчика 17; проекциям векторов магнитной индукции
на ось OY с выходов блоков 31-33, подключенных к второму выходу датчика 17; проекциям векторов магнитной индукции  на ось OZ с выходов блоков 34-36, подключенных к третьему выходу датчика 17; проекциям векторов магнитной индукции
на ось OZ с выходов блоков 34-36, подключенных к третьему выходу датчика 17; проекциям векторов магнитной индукции  на ось OX с выходов блоков 37-39, подключенных к первому выходу датчика 18; проекциям векторов магнитной индукции
на ось OX с выходов блоков 37-39, подключенных к первому выходу датчика 18; проекциям векторов магнитной индукции  на ось OY с выходов блоков 40-42, подключенных к второму выходу датчика 18; проекциям векторов магнитной индукции
на ось OY с выходов блоков 40-42, подключенных к второму выходу датчика 18; проекциям векторов магнитной индукции  на ось OZ с выходов блоков 43-45, подключенных к третьему выходу датчика 18; где OX, OY, OZ - оси опорной системы координат OXYZ, коллинеарные, например, осям датчиков или совпадают с осями одного из них. Далее по измеренным составляющим векторов магнитной индукции в местах размещения датчиков 16-18 определяют аналогично, как по первому и второму вариантам, расстояние r1 от датчика 16 до трехкомпонентного источника переменных магнитных полей, созданных катушками 47-49, расстояние r2 от датчика 17 до упомянутого источника и расстояние r3 от датчика 18 до этого же источника.
на ось OZ с выходов блоков 43-45, подключенных к третьему выходу датчика 18; где OX, OY, OZ - оси опорной системы координат OXYZ, коллинеарные, например, осям датчиков или совпадают с осями одного из них. Далее по измеренным составляющим векторов магнитной индукции в местах размещения датчиков 16-18 определяют аналогично, как по первому и второму вариантам, расстояние r1 от датчика 16 до трехкомпонентного источника переменных магнитных полей, созданных катушками 47-49, расстояние r2 от датчика 17 до упомянутого источника и расстояние r3 от датчика 18 до этого же источника.
Расстояния r1, r2, r3 можно представить в следующем виде:
где x, y, z - координаты источника переменных магнитных полей в системе координат OXYZ с полюсом местоположения датчика 16;
a1, b1, c1 и a2, b2, c2 -координаты датчиков 17 и 18 относительно датчика 16.
С целью упрощения решения по определению координат x, y, z расположение датчиков 17 и 18 можно выбрать, например, так, что a1 = b1 = a2 = c2 = 0, то есть разместить датчики 17 и 18 на осях, коллинеарных осям системы координат OXYZ. В таком случае
Получают две возможные точки пространства размещения источника с координатами x, y, z и - x, y, z, из которых одни являются действительными, то есть соответствуют местоположению источника, а следовательно, и объекта.
Для определения действительного значения координат углового положения объекта можно использовать алгоритм определения координат и магнитного момента источника поля (Смирнов Б. М. Методы определения координат и магнитного момента дипольного источника поля М.: Измерительная техника, 1988. Вып. 9, с. 40-42), задавшись начальными приближениями не в семи произвольно выбранных точках пространства, а начальными приближениями в двух точках пространства с координатами x, y, z и -x, y, z, из которых одни являются действительными. В таком случае, решение задачи определения координат и углового положения объекта сводится к решению в явном виде. Так как модули магнитных моментов катушек 47-49 (фиг. 2) известны, то результатом решения по упомянутому алгоритму определения действительных значений координат являются координаты источника переменных магнитных полей и направляющие косинусы l1, l2, l3 вектора магнитного момента 49, направляющие косинусы m1, m2, m3 вектора магнитного момента катушки 48 и направляющие косинусы n1, n2, n3 вектора магнитного момента катушки 47, которые находят по алгоритму первого варианта. Вектор магнитного момента жестко связан с осью катушки индуктивности (Чернышев Е. Т., Чечурина Е. Н., Чернышева Н. Г., Студенцов Н. В. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов, 1969, с. 41-42), поэтому направляющие косинусы магнитных моментов катушек 47-49, оси которых взаимно ортогональны, определяют угловое положение объекта с расположенными на нем катушками 47-49. Таким образом, техническое решение по третьему варианту обеспечивает определение углового положения объекта при его смещении и вращении объекта вокруг произвольно выбранной оси в пределах от 0 до 360o, при этом не требуется сведений о предварительном местоположении объекта.
Предлагаемое устройство для дистанционного определения положения объекта по четвертому варианту работает следующим образом.
В катушках 75-80 (фиг. 3), подключенных к генератору 74, протекают переменные токи разных частот. В результате этого катушки 75-80 воспроизводят переменные магнитные поля с частотами f1, f2, f3, f4, f5, f6. В трехкомпонентных датчиках 51-54 (например, в пассивных индукционных датчиках) по каждой компоненте индуктируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 75-80 с соответствующими частотами f1 - f6. Эти ЭДС через коммутатор 55 подаются на блоки 56-73, усиливаются и детектируются этими блоками, при этом каждый из блоков состоит из избирательного усилителя и детектора средних значений. В результате этого на выходах блоков 56-73 будут сигналы, пропорциональные амплитудам составляющих векторов магнитной индукции, созданных катушками 75-80. Поэтому выходные сигналы с блоков 56-73 будут пропорциональны следующим абсолютным значениям проекций векторов магнитной индукции, созданной катушками 75-80: модулям проекций векторов магнитной индукции,  на ось OX с выходов блоков 56-61, подключенных входами через коммутатор 55 к первому выходу датчика 51; модулям проекций векторов магнитной индукции
на ось OX с выходов блоков 56-61, подключенных входами через коммутатор 55 к первому выходу датчика 51; модулям проекций векторов магнитной индукции  на ось OY с выходов блоков 62-67, подключенных входами через коммутатор 55 к второму выходу датчика 51; модулям проекций векторов магнитной индукции
на ось OY с выходов блоков 62-67, подключенных входами через коммутатор 55 к второму выходу датчика 51; модулям проекций векторов магнитной индукции  на ось OZ с выходов блоков 68-73, подключенных входами через коммутатор 55 к третьему выходу датчика 51; модулям проекций векторов магнитной индукции
на ось OZ с выходов блоков 68-73, подключенных входами через коммутатор 55 к третьему выходу датчика 51; модулям проекций векторов магнитной индукции  на ось OX с выходов блоков 56-61, подключенных входами через коммутатор 55 к первому выходу датчика 52; модулям проекций векторов магнитной индукции
на ось OX с выходов блоков 56-61, подключенных входами через коммутатор 55 к первому выходу датчика 52; модулям проекций векторов магнитной индукции  на ось OY с выходов блоков 62-67, подключенных входами через коммутатор 55 к второму выходу датчика 52; модулям проекций векторов магнитной индукции
на ось OY с выходов блоков 62-67, подключенных входами через коммутатор 55 к второму выходу датчика 52; модулям проекций векторов магнитной индукции  на ось OZ с выходов блоков 68-72, подключенных входами через коммутатор 55 к третьему выходу датчика 52; модулям проекций векторов магнитной индукции
на ось OZ с выходов блоков 68-72, подключенных входами через коммутатор 55 к третьему выходу датчика 52; модулям проекций векторов магнитной индукции  на ось OX с выходов блоков 56-61, подключенных входами через коммутатор 55 к первому выходу датчика 53; модулям проекций векторов магнитной индукции
на ось OX с выходов блоков 56-61, подключенных входами через коммутатор 55 к первому выходу датчика 53; модулям проекций векторов магнитной индукции  на ось OY с выходов блоков 62-67, подключенных входами через коммутатор 55 к второму выходу датчика 53; модулям проекций векторов магнитной индукции
на ось OY с выходов блоков 62-67, подключенных входами через коммутатор 55 к второму выходу датчика 53; модулям проекций векторов магнитной индукции  на ось OZ с выходов блоков 68-73, подключенных входами через коммутатор 55 к третьему выходу датчика 53; модулям проекций векторов магнитной индукции
на ось OZ с выходов блоков 68-73, подключенных входами через коммутатор 55 к третьему выходу датчика 53; модулям проекций векторов магнитной индукции  на ось OX с выходов блоков 56-61, подключенных входами через коммутатор 55 к первому выходу датчика 54; модулям проекций векторов магнитной индукции
на ось OX с выходов блоков 56-61, подключенных входами через коммутатор 55 к первому выходу датчика 54; модулям проекций векторов магнитной индукции  на ось OY с выходов блоков 62-67, подключенных входами через коммутатор 55 к второму выходу датчика 54; модулям проекций векторов магнитной индукции
на ось OY с выходов блоков 62-67, подключенных входами через коммутатор 55 к второму выходу датчика 54; модулям проекций векторов магнитной индукции  на ось OZ с выходов блоков 68-73, подключенных входами через коммутатор 55 к третьему выходу датчика 54, где оси OX, OY, OZ - оси опорной системы координат OXYZ, совпадающие, например, с осями датчика 51. По измеренным составляющим векторов магнитной индукции в местах размещения датчиков 51-54 (фиг. 3) определяют аналогично, как и в устройстве по первому варианту, расстояние r1 от датчика 51 до трехкомпонентного источника переменных магнитных полей, созданных катушками 75-77, расстояние r12 от датчика 51 до второго трехкомпонентного источника переменных магнитных полей, созданных катушками 78-80; расстояния r2, r3, r4 от первого источника переменных магнитных полей до соответствующих датчиков 52, 53 и 54.
на ось OZ с выходов блоков 68-73, подключенных входами через коммутатор 55 к третьему выходу датчика 54, где оси OX, OY, OZ - оси опорной системы координат OXYZ, совпадающие, например, с осями датчика 51. По измеренным составляющим векторов магнитной индукции в местах размещения датчиков 51-54 (фиг. 3) определяют аналогично, как и в устройстве по первому варианту, расстояние r1 от датчика 51 до трехкомпонентного источника переменных магнитных полей, созданных катушками 75-77, расстояние r12 от датчика 51 до второго трехкомпонентного источника переменных магнитных полей, созданных катушками 78-80; расстояния r2, r3, r4 от первого источника переменных магнитных полей до соответствующих датчиков 52, 53 и 54.
Расстояния r1, r2, r3, r4 можно представить в следующем виде: ,
,
где x, y, z - координаты первого источника переменных магнитных полей в системе координат OXYZ датчика 51;
(a1, b1, c1), (a2, b2, c2) и (a3, b3, c3) -координаты соответствующих датчиков 52, 53, 54 в системе координат OXYZ.
Последнюю систему четырех уравнений можно привести к виду ;
; .
.
Решая систему последних трех уравнений, определяют координаты первого источника x1, y1, z1. При размещении, например, датчиков 52-54 на осях, коллинеарных осям OX, OY, OZ системы координат OXYZ значения a2 = a3 = b1 = b3 = c1 = c2 = 0, a1 ≠ 0, b2 ≠ 0, c3 ≠ 0, получим
Расстояния r12, r22, r32, r42 можно представить в следующем виде:
где x2, y2, z2 - координаты вторичного источника переменных магнитных полей в системе координат OXYZ датчика 51;
(a1, b1, c1), (a2, b2, c2) и (a3, b3, c3) -координаты датчиков 52-54 в системе координат OXYZ.
Решая последнюю систему четырех уравнений аналогично предыдущей для первого источника, определим координаты x2, y2, z2 второго источника.
Оба трехкомпонентных источника переменных магнитных полей жестко связаны с объектом, поэтому направление вектора  {x2 - x1, y2 - y1, z2 - z1}, в частности, его направляющие косинусы определяют угловое положение объекта. Значения направляющих косинусов вектора
{x2 - x1, y2 - y1, z2 - z1}, в частности, его направляющие косинусы определяют угловое положение объекта. Значения направляющих косинусов вектора  можно представить в следующем виде:
можно представить в следующем виде:
Следовательно, техническое решение по четвертому варианту обеспечивает определение углового положения объекта при его вращении вокруг произвольно выбранной оси в пределах от 0 до 360o, при отсутствии каких-либо сведений о местоположении объекта и отсутствии контакта с объектом.
Таким образом, технический результат предлагаемого устройства для дистанционного определения положения объекта выражается в определении местоположения и углового положения объекта при перемещении и вращении его вокруг произвольно выбранной оси в пределах от 0 до 360o как при наличии, так и при отсутствии контакта с объектом.
Использование в предлагаемом техническом решении вычислительного блока позволит автоматизировать процесс дистанционного определения положения объекта, в частности определения координат и углового положения объекта. Для этого выходы усилительно-преобразовательных блоков предлагаемого устройства (его вариантов) следует подключить, например, к преобразователю измерительному, многоканальному (ПИМ-1, сертификат N 15660-96, Госстандарт России), разработанного АО "АТИС" (г. С.-Петербург).
В предлагаемом устройстве (его вариантах) катушки индуктивности могут быть выполнены в виде мер магнитного момента, а трехкомпонентные пассивные датчики могут быть реализованы из пассивных однокомпонентных индукционных датчиков (Чернышев Е. Т., Чечурина Е. Н., Чернышева Н. Г., Студенцов Н. В. Магнитные измерения. М.: Изд-во Комитета стандартов и измерительных приборов, 1969, с. 41-42, 59-62). Усилительно-преобразовательные блоки, каждый из которых состоит из избирательного усилителя и синхронного детектора, активный трехкомпонентный датчик (феррозондовый датчик) и генератор переменных напряжений могут быть выполнены аналогично, как и в магнитометре (Афанасьев Ю. В. Феррозондовые приборы. Л.: Энергоатомиздат, 1986, с. 117, 132, 135, 137). Коммутатор может быть выполнен на микросхемах типа 590КН13. Генератор переменных напряжений и детектор средних значений, входящие в усилительно-преобразовательные блоки для устройства по четвертому варианту, могут быть выполнены по схемам, приведенным в работе (Гуткин В. С. Применение операционных усилителей в измерительной технике. Л.: Энергия, 1975, с. 67, 73).
Использование: средства измерения координат, скорости и угловых величин объекта в автоматических схемах управления, в геомагнитной навигации, в прецизионном машиностроении и приборостроении. Сущность изобретения: устройство для дистанционного определения положения объекта по первому и второму вариантам, содержащее трехкомпонентный магниточувствительный датчик, девять усилительно-преобразовательных блоков, трехкомпонентный источник переменных магнитных полей, выполненный из трех катушек индуктивности с взаимно ортогональными осями, и генератор переменных напряжений, включенные между собой определенным образом, обеспечивает в известном октанте определение координат и углового положения объекта в пределах от 0 до 360o при вращении объекта вокруг произвольно выбранной оси. Устройство для дистанционного определения положения объекта по третьему варианту, содержащее три трехкомпонентных магниточувствительных датчика, двадцать семь усилительно-преобразовательных блоков, трехкомпонентный источник переменных магнитных полей, размещенный на объекте и выполненный из трех катушек индуктивности с взаимно ортогональными осями, и генератор переменных напряжений, включенные между собой определенным образом, обеспечивает определение координат и углового положения объекта в пределах от 0 до 360o при вращении объекта вокруг произвольно выбранной оси. Устройство для дистанционного определения положения объекта по четвертому варианту, содержащее четыре трехкомпонентных магниточувствительных датчика, восемнадцать усилительно-преобразовательных блоков, два трехкомпонентных источника переменных магнитных полей, каждый из которых включает три катушки индуктивности с взаимно ортогональными осями, и генератор переменных напряжений, включенные между собой определенным образом, обеспечивает определение координат и углового положения объекта в пределах от 0 до 360o при вращении объекта вокруг произвольно выбранной оси и отсутствии контакта датчиков, коммутатора и усилительно-преобразовательных блоков с расположенными на объекте катушками индуктивности и генератором переменных напряжений. 4 с.п. ф-лы, 3 ил.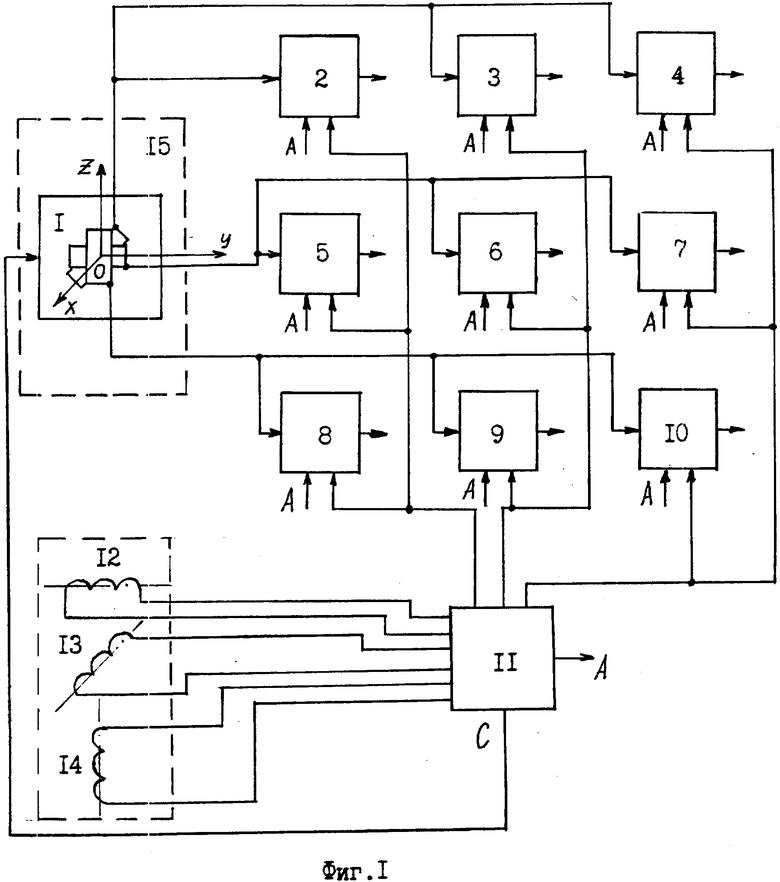
| SU, авторское свидетельство, 1064251, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Афанасьев Ю.В | |||
| Феррозонды | |||
| - Л.: Энергия, 1969, с | |||
| Заслонка для русской печи | 1919 |
|
SU145A1 |

