п
o fifxaef / t/
ycflj/ i ucmfy «zfeiji/
Х/J
D
4 СО 01
;о
4:
Изобретение относится к измерительной технике в области геофизики в частности океанографии, и может использоваться на научно-исследовательских судах в комплексах аппаратуры зондирования гидрологических, гидрооптических, гидрохимических, гидробиологических элементов, а также течений с целью определения пространственного положения погружаемого устройства в воде.
Целью изобретения является повьше- ние точности измерения,,
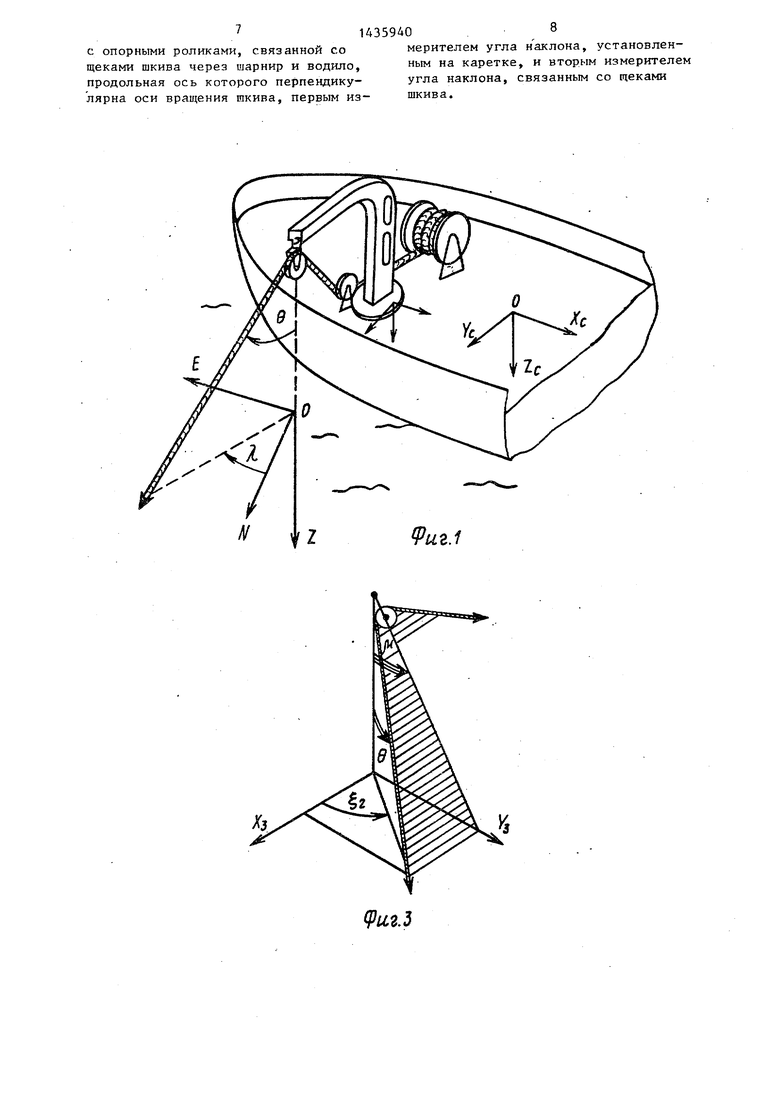
На фиг.1 показаны углы ориентации троса гидрофизического прибора относительно судовой систешч координат OX,Y-Z., и геограАической системы ко-
С С
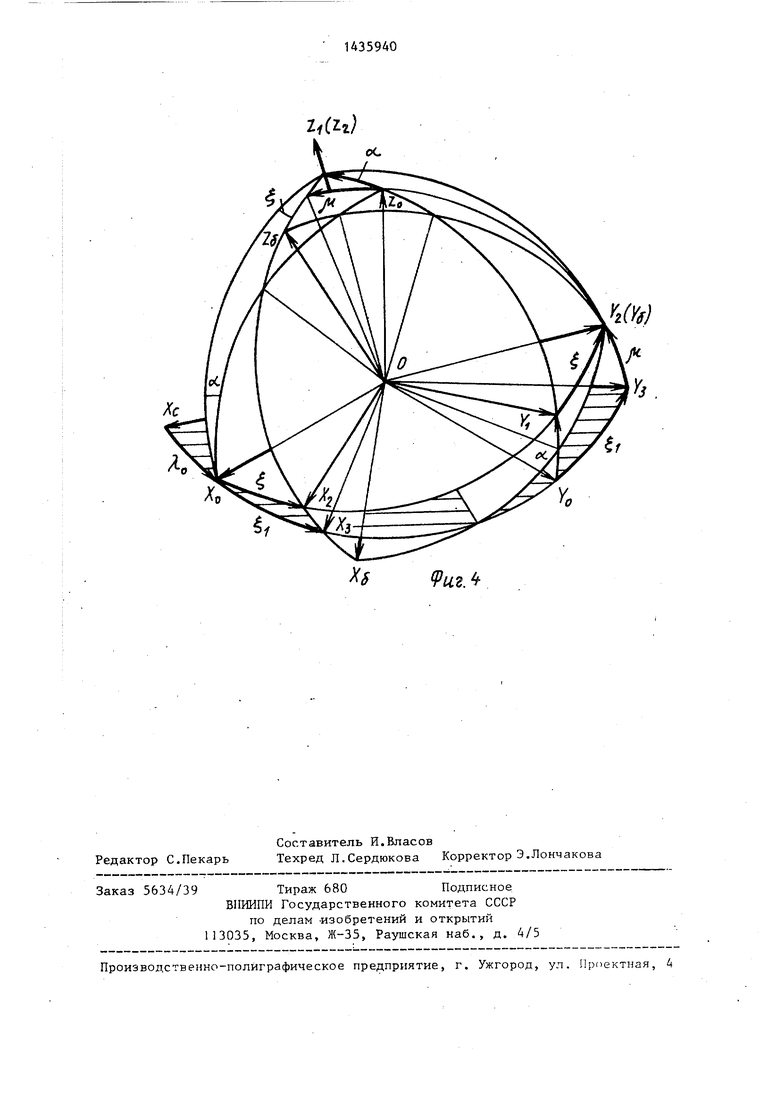
ординат ONEZ; на фиг.2 - схема устройства для измерения параметров ориентации троса; на фиг.З - взаимное положение измеряемых углов в измерителе, на фиг.4 - системы координат, используемые в измерителе.
Для определения параметров пространственной ориентации коренного конца троса наряду с измерением его угла отклонения от вертикали 6 необходима информация об азимутальном его положении относительно некоторой системы координат, связанной с Землей.
На фиг.1 показаны углы , б , под- лежапще измерению, а также географическая система координат ONEZ - правая декартова система, у которой плоскость NOE горизонтальна, направлени оси OZ совпадает с направлением силь тяжести, ось ON направлена на Север, ОЕ - на Восток, 0 - угол между вертикалью места и продольной осью тро- са, X - угол между горизонтальной продольной оси троса и направлением на Север. Принятые положительные направления углов О, 9i отмечены стрелками.
Схема предлагаемого измерителя представлена на фиг.2. Он подвешен к кран-балке 1, жестко связанной с судном, посредством трех кинематически связанных осей 2-4, установленных в соотв етствуюи(их опора;х. Ось 2 крепления подвеса к кран-балке перпендикулярна условно вертикальной оси 3 подвеса, а последняя, в свою очередь перпендикулярна оси 4, которая параллельна оси 5 вращения грузонесущего шкива 6. Такой подвес обеспечивает три угловых степени свободы грузойе- сущего шкива относительно кран-балк
10
15
25
20-
,Q ,
35940
(судна). На оси 3
30
35
45
50
55
укреплен первичный преобразователь 7 угла поворота блока грузонесущего шкива 6 относительно его условно вертикальной оси.
Параллельно оси 5 вращения грузонесущего шкива 6 установлена ось 8 внешнего кольца первого карданова подвеса, на внутреннем кольце которого размещен первичньй преобразователь 9 угла крена блока. Физический маятник в первом кардановом подвесе вместе с первичным преобразователем 9 составляет измеритель угла крена блока.
Ось 10 внешнего кольца второго -карданового подвеса параллельна продольной оси грузонесущего троса. На внутреннем кольце второго карданового подвеса устанонлен первичный преобразователь 11 угла отклонения продольной оси троса от вертикали. Физический маятник, заключенный в карда- новый подвес, вместе с первичным преобразователем 11 образуют измеритель угла отклонения продольной оси троса от вертикали. Внешнее кольцо карда- нова подвеса измерителя угла отклонения продольной оси троса от вертикали жестко связано с четьфьмя вра- .щающимися в соответствую1чих осях направляющими роликами 12, охватывающими трос, чем обеспечивается параллельность внешней оси 10 карданового подвеса продольной оси троса. Карданов подвес с направляющими роликами посредством водила 13, имеюр1;его шарниры 14 и 15, крепится к условно вертикальной оси подвеса блока 3,
Трос, к которому крепится гидрофизический прибор и угловая ориентация которого измеряется, в рабочем положении проходит через направляющие ролики 12, шкив 6 грузонесущего блока, дополнительный шкив 16 и подается на барабан гидрофизической лебедки (не показана).
Измеритель 7 угла разворота грузонесущего шкива относительно условно вертикальной оси выполнен на основе прецизионного потенциометра, движок которого жестко соединен с условно вертикальной осью 3, а потенциометр - с боковыми поверхностями блока, на которых установлена ось 5 грузонесущего шкива 6.
Измерители угловьк отклонений представляют собой физические маятники, укрепленные в кардановых подвесах, причем чувствительные элементы измерителей, например, на основе датчиков Холла, индукционных преобразователей или прецизионных потенциометров располагаются в опорах внутреннего и внешнего кольца карда- нового подвеса. Резонансная частота колебаний маятников значительно отличается от периода качки судна, благодаря чему последняя практически не влияет на показания измерителя.
Для пояснения принципа работы устройства введем следующие системы координат.
OXcYc c - связанная с судном правая декартова система координат, у которой плоскость XpOYj. параллельна плоскости ватерлинии судна X()(,Zp диаметральная плоскость судна. Про-
20
30
дельная ось ОХ направлена от кормы судна к носу, OYj. - от диаметральной плоскости к правому борту судна (фиг.1).
ОХрУдЛ, - связанная с кран-балкой 25 правая декартова система координат, у которой плрскость XoOYo параллельна плоскости ватерлинии судна, ось ОХ параллельна оси 2 крепления подвеса блока к кран-балке (фиг.2) и направена влево, если смотреть от основания кран-балки в сторону ее вылета. Ось OZp направлена условно вниз.
pXgYgZg. - связанная с блоком правая декартова система координат, у которой плоскость Xg-OZg- параллельна 35 плоскости шкива блока, ось ОХ в ра- Ьочем режиме направлена в сторону крепления погружаемого устройства к тросу, OZg. лежит на линии сбединения оси 4 подвеса блока и оси 5 вращения грузонесущего шкива 6 (фиг.2) и направлена от подвеса блока в сторону грузоне(;гу1Чего шкива 6.
OX,Y,Z, - связанная с осями 2 и 3 подвеса блока правая декартова систе ма координат, у которой ось ОХ, совпадает с осью OXjj, а ось OZ, направлена вдоль оси 3 подвеса в сторону от оси 2 к грузонесущему шкиву 6 (фиг.2). - 50
- связанная с измерителем 7 угла поворота грузонесущего шкива относительно его условно вертикальной оси подвеса правая декартова система координат, у которой плоскость изме- 55 рения упомянутого угла перпендикулярна условно вертикальной оси 3 подвеса, ось GY коллинеарна оси GYg,
.-45
п
JJ
20
30
25
35
50
55 ,
45
а ось OZ совпадает с осью OZ, (фиг.2).
.jZ, - связанная с горизонтальной плор(адкой измерителя угла крена блока правая декартова система координат, начало которой расположено в точке пересечения осей карданова подвеса, плоскость XjOY, горизонтальна, ось ОХ совпадает с осью внутреннего кольца карданова подвеса и в отсутствии крена и дифферента блока и судна ее направление совпадает с направлением оси OXg. Направление оси OZg. совпадает с направлением силы тяжести.
Введем необходимые обозначения углов: 9 - угол отклонения коренного конца троса от вертикали - угол между вертикалью места и продольной осью троса, измеренной на участке от грузонесущего шкива 6 блока до точки входа троса в воду, К - курс судна - угол между горизонтальной проекцией продольной оси OXg-судна и направлением на Север ON; fj - угол крена блока - угол между вертикалью места и плоскостью Xg.OZ системы координат, связанной с блоком, Л, - начальный угол установки кран-балки,1 относительно судна - угол между проекцией оси ОХд на плоскость X OY, и осью ОХр, od - угол отклонения условно вертикальной оси 3 подвеска блока (оси OZj,) от оси 07.; - угол поворота блока вокруг условно вертикальной оси 3 (OZ,) подвеса - угол между осями ОХ, и OX,j систем OX,Y,Z, и соответственно, , - угол между проекцией оси ОХ, на плоскость XpOYj, и осью OXjj, j - угол между проекцией оси ОХ, на плоскость и проекцией продольной оси троса на эту же плоскость.
Взаимное расположение описанных систем координат показано на фиг.3.
Примем положительные направления вращений блока и кран-балки 1 относительно судна, а также судна относительно географической системы координат, отмеченные на фиг.1-3- стрелками.
При выполнении зондирований гидрофизическим прибором, прикрепленным к :грузонесущему tpocy, дрейф судна и менякщиеся по глубине течения воздействуют на трос, имеющий конечное гидродинамическое сопротивление. В результате трос отклоняется от верти- . кали и движется в определенном нап514
равлении относительно судна, которое соответствует равнодействующей всех сип, В реальных условиях угол наклон троса 0 может изменяться (фиг,1) от нуля до 60 и 70°, а угол от -(70..
80) до +(70;..80) .
Таким образом, при опускании гидрофизического прибора трос занимает в пространстве положение некоторой линии, параметры ориентации которой относительно судовой системы координат характеризуется углами 0 и Л , так как плоскость кран-балки 1 занимает определенное и жестко зафиксированное положение относительной осей .. Вследствие натяжения коренного конца троса под действием веса гидрофизического прибора и отрезка троса, находящегося в воде, плоскость грузонесущего гчкива 6 ориентируется таким образом, что она совпадает с плоскостью OXg.Zg, в которой лежат участки троса от точки его погружения в воду до грузонесущего шкива 6 и от шкива 16 промежуточного блока до шкива 6. При этом происходи соответствукиций разворот измерителей 7, 9 и 11 углов и регистрируются соответственно углы б, U и , , которые используются в вычислителе при определении угла /Х . Величина угла Ад предварительно измеряется и вводится в вычислитель на судне, к которому подключается также указатель курса судна К, связанный с судовым гирокомпасом (не показано)с
Искомый угол определяют по формуле:
Л- К , + 4. (1)
Если положение троса относительно кран-балки и судна соответствует фиг.З и 4. ( 9 О, -ТГ/. .), угол может быть найден по данным измерений углов 6 и (u:
. j arcsin(tg/u/tp.0). (2)
Более общее соотношение, учитывающее возможность отрицательных зна- дений б :
1 arcsin(tBjt(/tge) + п7, (3 где п О при 0 О и п 1 при
е 0.
При 0 0 направление д не определенно (направление коренного конца троса совпадает с направлением силы тяжести).
Ввиду описанного ранее взаимного расположения систем координат угол:, может быть вьиислен по соотношениям:
0
1
при
б
4.
+ рТ,
где
1, arct8(s|- )
-1Г. signir,
., V ч
а р 1 при 2 2
р О при - : ,
(4)
(5) (6)
II 2
cos
ГПЯ5 V
(7)
-z-Jcos. - . cosf I
. Подставляя (7) в (5) и учитывая, что диапазон изменения есть
- ITi-
к
получим:
0
t ), sinvч
Г arctg (,)
. 1 i. . .
signf.
njcos -
+ p. ir-sign. (8)
Итак, используя данные измерений углов К, 0 , fU, , по соотношениям (1), (3), (5), (6) и (8) определяется 5 искомый угол . Пусть углы К, /Дд , , jU, 0 измеряются с погрешностями ЛК, д А, й, &(U, u9 , тогда суммарная погрешность определения угла равна:
S 1п2Q-ijtgze - tg2(u
40
Пример. Известно, что ЬК 0,3°, й-Л ,1°, uf 0,5% uQ 0,5° У 45, U 10°. Тогда погрешность определения угла ЬТ будет равна 2,56°. Это составляет значительное 45 повьш1ение точности по сравнению, например, с компасом, девиационная погрешность которых может достигать десятков градусов.
50
Формула изобретения
Устройство для измерения параметров ориентации троса геофизического прибора, содержащее шкив со 01еками, eg установленный на кран-балке, и кар- данньй подвес с измерителем угла поворота шкива, отличающееся тем, чт о с целью повьшения точности, оно дополнительно снабжено кареткой
714359408
с опорными роликами, связанной со мерителем угла н аклона, установлен- щеками шкива через шарнир и водило, нь1м на каретке, и вторым измерителем продольная ось которого перпендику- угла наклона, связанным со щеками лярна оси вращения шкива, первым из- шкива.
Изобретение относится к геофизике и м.б. использовано в океанографии. Цель изобретения - повышение точности измеренийпараметров. В устр-ве на кран-балке 1 установлен шкив 6 со щеками, связанными через шарнир и водило 13 с. кареткой. На внутреннем кольце первого карданного подвеса размещен первичный преобразователь 9 угла крена блока. Первичный преобразователь 11 угла отклонения продольной оси троса от вертикали установлен на внутреннем кольце второго карданового подвеса, внешнее кольцо которого жестко связано с вра- .щающимися направляющими роликами 12, охватывающими трос. 4 ил. SS (Л
п
9и.г.1
(Ри.3
г1(гг}
i
«г
| Руководство по гидрологическим работам в океанах и морях.- Л.: Гид- рометеоиздат, 1977, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Кушкир В.М., Ремчуков В.И | |||
| Колебания самописцев в течении на автономных буйковых станциях и их влияние на измерение параметров-течений.- Океанология, 1982, т | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Букса для железнодорожного подвижного состава | 1922 |
|
SU329A1 |
