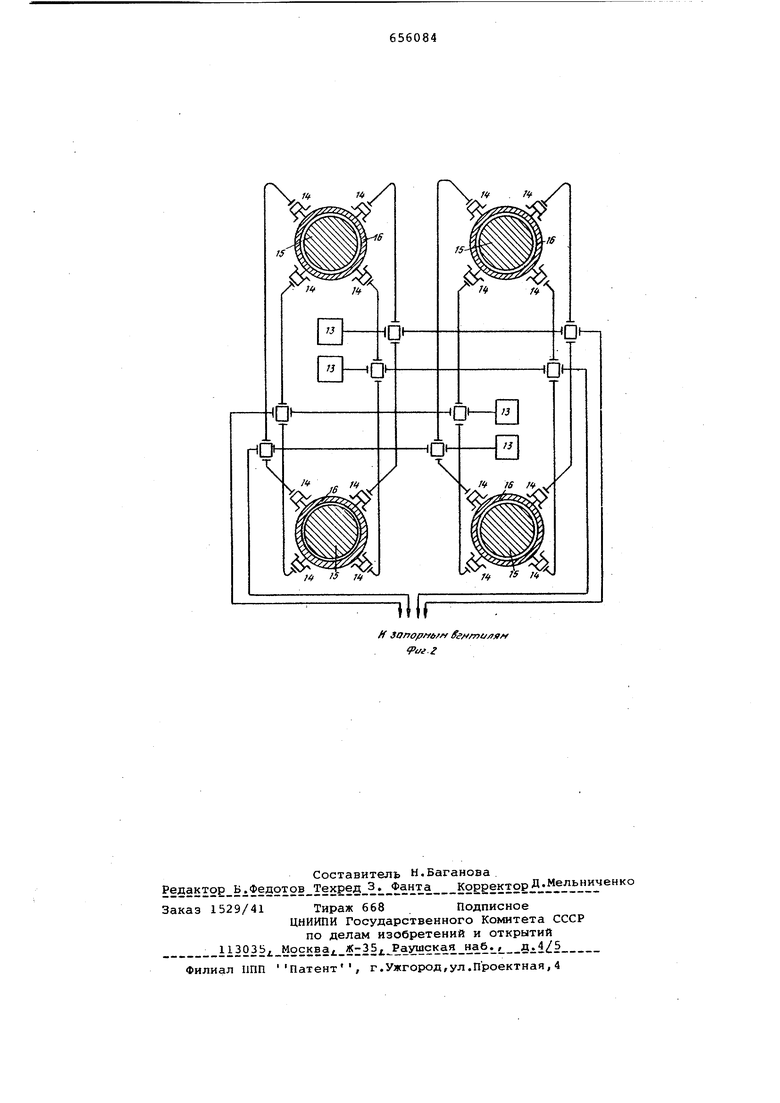
(Ь4) УСТРиПСТВО ДЛЯ КОЛИЧЕСТВА ЦИКЛОВ НАГРУЖЕНИЙ ГИДРАВЛИЧЕСКОГО ПРЕССА полнительному блоку, причем датчик боковой изгибающей силы соединен с одним из входов вычислителя, другой вход которого подключен к последовательно соединенным датчику перемещения подвижной траверсы и усилителю, а выход вычислителя подключен к соответствующим входам преобразователей, другие входы которых соединены с датчиком напряжен изгиба и датчиком боковой изгибающе силы, а выходы соответствующих регистрирующих блоков через элемент ИЛИ подключены к исполнительному блоку. на фиг.1 изображена структурная электрическая схема устройства; на фиг.2 - схема установки на колоннах месдоз, входящих в состав датчика боковой изгибающей силы. Датчики давления 1, количество которых выбирают по числу независимых групп рабочих цилиндров (например две группы), устанавливают на трубопроводах гидросистем этих цилиндров (на чертеже не показаны) и соединяют со входами своих усилит лей 2. Ко входам усилителей подключены регистрирующие блоки, состоящи из пороговых элементов 3, настроенных соответст1венно на срабатывание при минимсшьной средней и максимальной величине сигнала, и электро механических счетчиков 4. Датчик напряжения изгиба 5 состоит из двух мостовых схем 6, усилителей 7 и п лтfсумматора 8. Мостовые схемы 6 образ ваны электротензомерами сопротивления диаметрально расположенных дат чиков деформации (на чертеже не показаны) , устанавливаемых на поверхности колонны пресса в плоскости поперечного сечения по осям, смещен ным под углом 90 друг к другу. Выходы мостов б через усилители 7 соединены со входами сумматора 8 Датчик 9 боковой изгибсисяцей силы, с которой подвижная траверса пресса давит на колонны, состоит из двух тензометрических мостов 10 и связанного с ними через усилители 11 сумматора 12. Мост 10 образован четырьмя электротензомютрами сопро тивления, расположенными попарно в двух месдозах 13. Месдозы устанавливают по одной в каждой из четырех независимых гидросистем синх низирующих цилиндров 14, которые расположены на подвижной траверсе. У каждой колонны 15 установлено че тыре синхронизирукицих цилиндра 14 в одной горизонтальной плоскости, причем их плунжеры (на чертеже не показаны) упираются в направляющую втулку 16 подвижной траверсы по осям, смешенньм под углом 90 друг к другу. Каждый из двух мостов 10 состоит из двух месдоз 13, которые устанавливают в гидросистеме диаметрально расположенных цилиндров 14. Датчик 17 перемещения подвижной траверсы пресса установлен на верхней неподвижной поперечине и связан с траверсой зубчатой рейкой. Ок представляет собой поворотный трансформатор, выходное напряжение которого пропорционально углу поворота ротора относительно статора,а угол поворота является функцией расстояния между нижней неподвижной поперечной и подвижной траверсой пресса (на чертеже не показаны).Выход датчика перемещения через усилитель 18 связан со входом вычислителя 19,а выход датчика боковой изгибающей 9 непосредственно соединен со вторым входом вычислителя и подключен к соответствующим входам преобразователей 20, к другим входам которых соответственно подсоединены выходы вычислителя 19, выход датчика напряжения изгиба 5 и выходы усилителей 2. Преобразователь 20 может быть известной конструкции как магнитный усилитель трансформаторного типа. Выходы преобразователей 20 подключены через пороговые элементы 21 к своим регистрирукадим блокам 22 подобным блокам 3 и 4, а входы блоков 22, регистрирующих максимальные пороги нагружения, связаны через элемент ИЛИ 23, число входов которого соответствует количеству мест базовых деталей, заи ищаемых от перегрузки, с исполнительным блоком 24. Раav« ч« . л гхюпаич j.m.yn. .-« « к с. ботает предлагаемое устройство следующим образом. Давление в рабочих гидроцилиндрах пресса преобразуется с помощью датчиков 1 в пропорциональный ему электрический сигнал, который через усилитель 2 поступает на пороговые элементы 3. При достижении выходным сигналом усилителя уровня срабатывания порогового элемента 3 на его выходе появляется импульс напряжения, оч; которого срабатывает электромеханический счетчик 4. При наличии давления в рабочих гидроцилиндрах колонны пресса растягиваются продольными силами, а напряжение растяжения в колоннах пропорционально этому давлению и, следовательно, электрическим сигналом датчиков. При наличии изгиба колонн датчик напряжения изгиба 5, установленный в плоскости поперечного сечения колонны, выдает электрический сигнал и. ,пропорциональный модулю механичес/сого напряжения от изгибакмдего момента, действующего в этой плоскости. Мостовые схемы 6 преобразуют поверхностные механические напряжения в электрические сигналы. Эти сигналы через усилители 7 подаются на сумматор
8, выполняющий геометрическое сложение по формуле
.-Vu.Su.
и,
м у г
При питании мостов б постоянным током сумматор должен вьшолнять возведение в квадрат, алгебраическое сложение и извлечение корня. Питание мостов переменным током позволяет упростить геометрическое сложение и заменить ее известным способом алгебраического сложения двух электрических сигналов, переменные напряжения которых сдвинуты по фазе на 90° относительно друг друга.
После выпряютения сигнал с сумматора 8 пропорционален модулю механического напряжения.
Датчики боковой изгибающей силы 9 работают так же, как датчики 5. Отличие состоит лишь в измерении физических величин,. которыми у датчика 9 являются давления жидкости. Тензометрические мосты 10 преобразуют разности давлений в диаметрально расположенных синхронизирующих цилиндрах 14 в пропорциональный электрический сигнал. При увеличении боковой изгибающей силы повышается давление в гидросистемах цилиндров, расположенных со стороны действия этой силы, а в цилиндрах, установленных с противоположной стороны колонны, давление в этот момент падает. Усилия на гидроцилиндры передаются через втулки 16 подвижной траверсы. Разности давлений в диаметрально расположенных синхронизирующих цилиндрах у одной колонны пропорциональны компонентам боковой изгибающей силы, действующей в точке упора втулок скольжения 16 подвижной траверсы в колонны пресса. Электрические сигналы мостов 10 через усилители 11 поступают на сумматор 12, подобный сумматору 8, который геометрически складалвает входные сигналы по формуле , ,, где и/ру - электрический сигнал, пропорциональный модулю боковой изгибаю щей силы /F/ ; и Q - электрический сигнал с пер вого монета 10, пропорциональный разности давлений в одной паре цилиндров 14 ДРа электрический сигнал со второго моста, пропорциональный разности давлений в другой паре цилиндров, расположенных под углом 90 к первой паре. Электрический сигнал, пропорциональный расстоянию между нижней неподвижной поперечиной и центром вту лок скольжения подвижной траверсы. Подвижная траверса при перемещениях с помощью зубчатой рейки вращает
ротор датчика 17 через соответствующий редуктор, выходное напряжение датчика пропорционально углу поворота ротора относительно статора.
Электрические сигналы с датчика 9 боковой силы Uffi и с датчика перемещения 17 - и ; через усилитель 18 поступают на вычислитель 19, который возводит сигнал llx в квадрат и уми
ножает сигналы и и
IflВыходные напряжения вычислителя 19
пропорциональны произведениям
Х VF/ X Ifl -Выходные электрические сигналы датчиков 5,9 и вычислителя 19 приходят на управляющие обмотки преобразователей 20, а электрические сигналы усилителей 2 - на пороговые элементы 3 и на соответствующие управлякнцие обмотки преобразователей 20.Эти сигналы преобразуются в пропорциональные магнитные потоки с соответствующими масштабными коэффициентами,, определяемыми выбранными aмпepвитkaми управляющих обмоток, а эти потоки алгебраически складываются по формуле
.KC--° Vf B /Mr« J/P/ + ,P,,p,,
где .. - выходной сигнал преобAnvlKt
разователя 20, пропорциональный максимальному механическому напряжению в контролируемом сечении колонны пресса;
и, - электрический сигнал, пропорциональный давлению в первой гидросистел рабочих цилиндров пресса;
Ug - электрический сигнал, пропорциональный давлению во второй гидросистеме рабочих цилиндров пресса;
и/м/ электрический сигнал, пропорциональный модулю изгибающего момента;
Vffj - электрический сигнал, пропорциональный модулю боковой изгибающей силы ; и., - электрический сигнгш, пропорциональньлй расстоянию между неподвижной нижней поперечиной и центром втулок скольжения подвижной траверсы; a,t),c,d,e,f - масштабные коэффициенты, учитывающие степень воздействия контролируемых сил на защищаемое место базовой детали и направления действия этих сил, т.е. учитывающие знак перед слагаемым. Преобразователи 20 отличаются друг от друга масштабными коэффициентами а,в,с, d,e,f, которые получают расчетным путем для контролируемых сечений и уточняют при отладке систе1|«л путем тензометрических исследований. Сигналы с преобразователей поступают на соответствующие пороговые элементы 21 и регистрирующие блоки 22. Когда сигнал преобразователя достигает максимума и срабатывает регистрирующий блок 22 максимального порога, сигнал подается через Функциональный элемент ИЛИ 23 на исполнительный блок 24, срабатывание которого вызывает аварийное откл очение высокого давления в рабочих цилиндрах пресса. . Описанное устройство обладает расширенными функциональными, возмож ностями благодаря введению в него датчиков напряжения изгиба, боковой изгибающей силы и перемещения подвижной траверсы пресса, позволяющих учитывать дополнительные нагрузки базовых деталей, в частности колонн пресса, находящихся одновременно под воздействием рабочих цилиндров и изгибающих сил,которые во никают из-за особенностей tёxнoлoги обработки заготовок.Кроме того,благ даря введению элемента ИЛИ появляет возможность аварийного отключения высокого давления в рабочих цилиндрах пресса и повышения точности изм рения уровня нагружения отдельных мест базовых деталей. 8 Формула изобретения Устройство для учета количества циклов нагружеиий гидравлического пресса по авт.св. № 332481, отличающееся тем, что, с целью повышения точности, в него введены датчик напряжения из1иба, датчик боковой изгибающей силы, датчик перемещения подвижной траверсы, вычислитель и элемент ИЛИ, подк,люченный к исполнительному блоку, причем датчик боковой изгибающей силы соединен с одним из входов вычислителя,другой вход которого подключен к последовательно соединенным датчику перемещения подвижной траверсы и усилителю, а выход вычислителя подключен к соответствующим входам преобразователей, другие входы которых соединены с датчиком напряжения изгиба и датчиком боковой изгибающей силы, а выходы соответствующих регистрирующих блоков через элемент ИЛИ подключены к исполнительному блоку. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 332481, кл. G07 С 3/10, 30.06.70.
ff Sonopffttfff fe muaaff Раг.г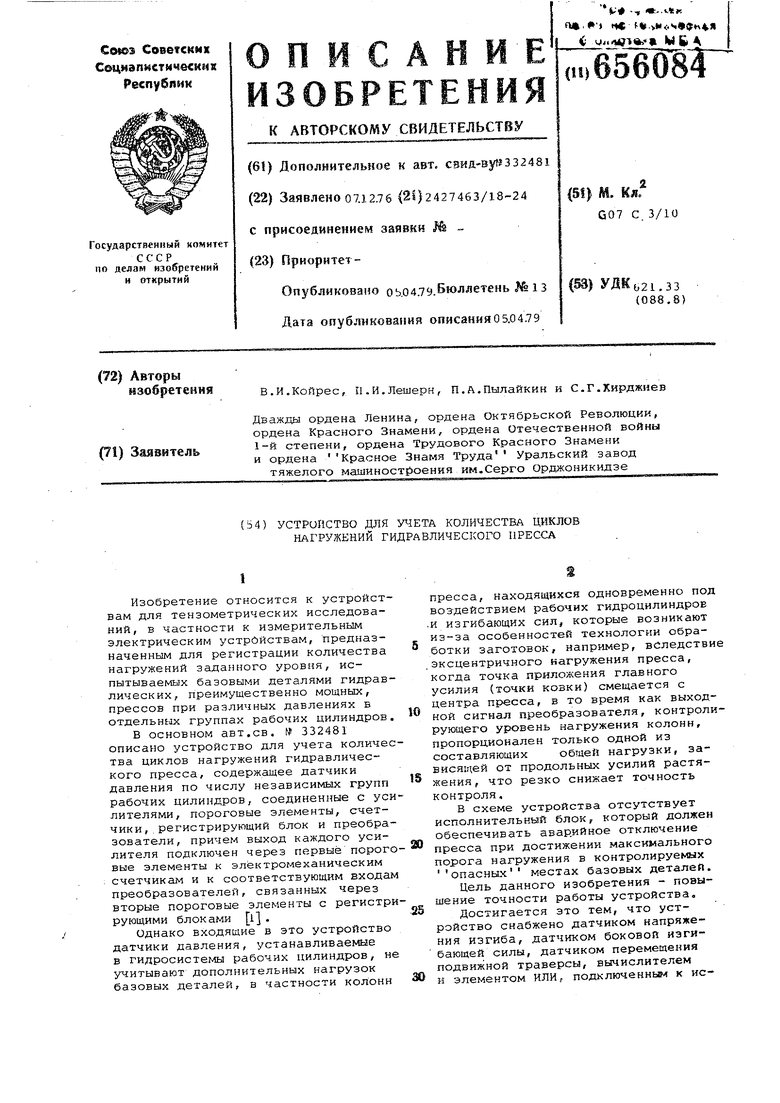


| название | год | авторы | номер документа |
|---|---|---|---|
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
| Устройство управления весовым порционным дозатором | 1981 |
|
SU1008625A1 |
| Устройство для эксплуатационного контроля осевых зазоров в проточной части цилиндра паровой турбины | 1983 |
|
SU1157271A1 |
| Устройство регулирования оптимальной осевой нагрузки на долото | 1981 |
|
SU972065A1 |
| Пресс непрерывного действия для изготовления древесно-стружечных плит | 1981 |
|
SU1043024A1 |
| Устройство для контроля качества изделий | 1984 |
|
SU1233042A1 |
| Устройство для моделирования волоскового механорецептора | 1980 |
|
SU928375A1 |
| Устройство для оценки рейсовой скорости бурения | 1974 |
|
SU570701A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Вычислитель углеродного потенциала | 1977 |
|
SU692921A1 |