(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВОЛОСКОВОГО МЕХАНОРЕЦЕПТОРА
1
Изобретение относится к бионике и может быть использовано в системах тактильного и кинестетического очувствления адаптивных роботов.
Известно устройство для измерений усилий, сюдержащее силовводяший элемент, вьтолненный в виде гибкого стержня, консольно закрепленного в корпусе и связанного с пьезоэлементом, обкладки которого подключены ко входу усилителя. .Данное устройство воспроизводит некоторые механические характеристики ВОЛОСКОВОГО механоредептора и его способность преобразовывать механические воздействия в электрический сигнал 1.
Наиболее близким к предлагаемому является чувствительный элемент, содержащий гибкий силовводящий элемент, консольно закрепленный в корпусе, четыре контактных механоэлектрических преобразователя, устройство обработки сигналов преобразователей. Данное устройство способно в некоторой степени воспроизводить свойство ВОЛОСКОВОГО механо-
рецептора, определять направление механического воздействия в плоскости, перпендикулярной оси симметрии силовводящего элемента 2 .
Недостатками указанного устройства являются низкая точность определения направления механического воздействия в плоскости, перпендикулярной оси симметрии силовводящего элемента, невозможность определения направления и величины вектора механического всхздейст вия в пространстве и, как следствие, малая точность моделирования биологического прототипа.
Цель изобретения - повьпиение точности моделирования биологического прототипа.
Поставленная цель достигается тем, что в устройство, содержащее трехкомпонентный датчик с гибким силовводяшим элементом, дополнительно введены три усилителя и блок вычисления модуля вектора действующей силы, причем первый, второй и третий выходы трехкомпонентного датчика механического воздействия через соответствующие усилители подключены к соответствующим входам блока вычисления модуля вектора действующей силы.
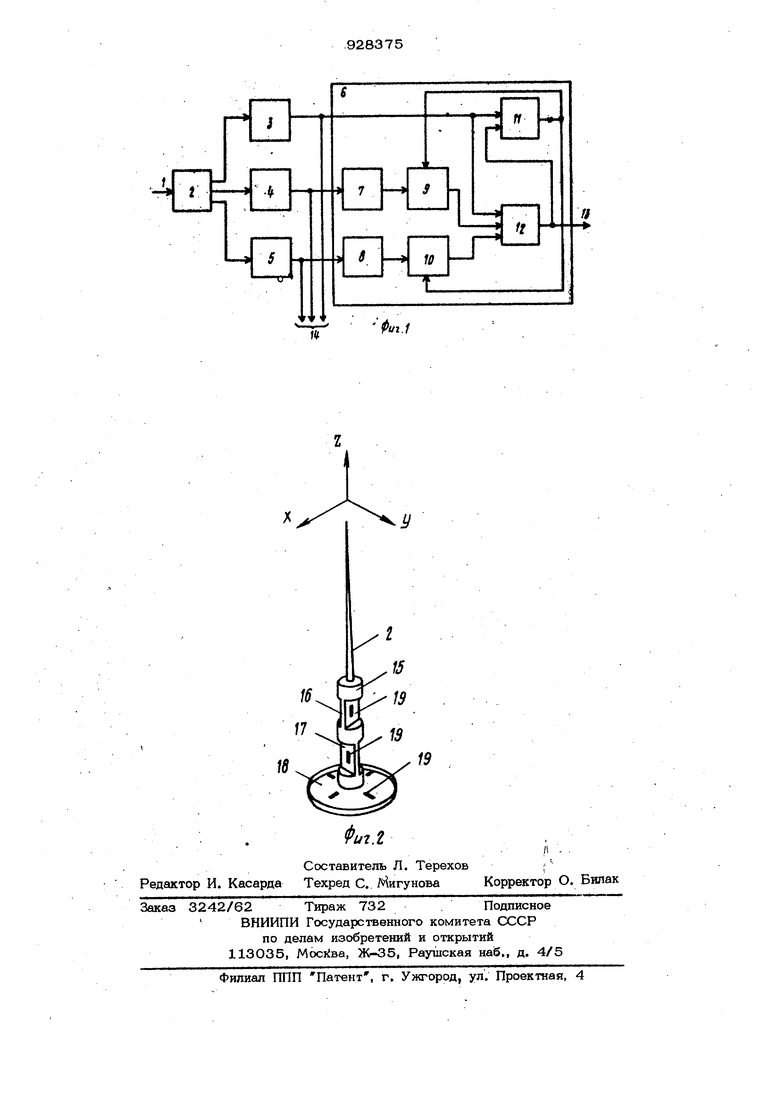
Кроме того, блок вычисления модуля вектора действующей силы содержит два делителя напряжения и два сумматора, причем первый вход блока,соединен с первыми входами первого и второго сумматоров, второй вход блока через первый квадратор подключен,к первому входу первого делителя напряжения, выход которого соединен с вторым входом второго сумматора, выход которого является выходом блока и подключен k второму входу первого сумматора, выход которого соединен с вторым входом первого делителя напряжения и пер- вым входом второго делителя напряжени третий вход блока через второй квадратор подключен к второму входу второго делителя напряжения, выход которого соединен с третьим входом второго сумматора. На фиг. 1 представлена функциональ ная схема устройства для моделирования волоскового механорецептора ; .на фиг. 2 - трехкомпонентный датчик механического воздействия аксонометрии, общий вид. Устройство содержит трехкомпонентный датчик 1 механического воздействи с гибким силовводящим элементом 2, усилители 3-5, блок 6 вычисления модуйя вектора действующей силы, в который входят первый и второй квадраторы 7 и 8, первый и второй делители 9 и 1О напряжения, первый и второй сумматоры, 11 и 12. Выход второго сумматора является первым выходом 13 устройства, а вьхходы усилителей 3-5 являются вторыми выходами 14 устройства. Трехкомпонентный датчик механического, воздействия представляет собой стержень 15 круглого поперечного сечения с двумя балочными упругими элементами 16 и 17. На одном из концов стержня имеется мембранный упругий элемент 18, а на втором - гибкий силовводящий элемент 2, выполненный в виде прямого круглого конуса. На балочные и мембранный упругие элементы наклеены полупроводниковые тензометры 19 и соединены в три мостовые схемы, выходы которых ЯЕВляются выходами датчика. При действии силы Р, произвольно приложенной к силовводящему элементу 2
тензометры 19, размещенные на мембранном упругом элементе 18, регистрируют составляюпото силы Р-, при незначительной реакции на составляющие Р
и Р, . Достаточно высокая степень развязки при измерении составляющей Р от паразитных влияний составляющих Ру и Р, происходит за счет компенсационных свойств мостовой измерительной
схемы. Коэффициент перекрестных влияний на составляющую Р не превьплает 2%. Составляющая Р действующей силы регистрируется с помощью полупроводниковых тензометров 19, размещенных
на балочном упругом элементе 16. При этом, составляющая Р , действуя на балочный упругий элемент 17, вызывает его незначительную деформацию изгиба, ввиду значительно больщего, по сравнению с элементом 16, MOMeHira сопротивления относительно оси X, что в совокупности с компенсационными свойствами мостовой измерительной схемы обеспе- чивает независимость показаний датчика по оси X от составляющей Р., . Аналогично, составляющая РХ регистрируется с помощью тензометров 19, размещенных на балочном упругом элементе 17. При этом, составляющая Р , действуя на балочный упругий элемент 16, вызьюает весьма малую еГо деформацию изгиба ввиду значительно большего, по сравнению с элементом 17, момента сопротивления относительно оси У, что в совокупности с компенсационными свойствами мостовой измерительной схемы обеспечивает независимость показаний датчика по оси У от составляющей Р- . Коэффициент перекрестных влияний по составляющим PJ; и Р , вследствие указанных особенностей, исчезающе мал. Силовводящий элемент 2, вьшолненный в виде прямого круглого конуса и представляющий собой балку равного сопротивления, позволяет точно передавать силовое воздействие на упругие элементы без потери устойчивости. Кроме того, такая форма силовводящего элемента удовлетворяет принципу силовведения Сен-Венана. Сигналы с выхода датчика, пропорциональные составляющим действующей СИЛЫ, усиливаются с помощью усилителей 3 - 5 и поступают на вторые выходы 14 устройства и в блок 6 вычисления модуля вектора действующей силы. Вычисление модуля осуществляется по методу неявных функхшй, который дает более точные результаты. В блоке 6
вычисления модуля вектора решается уравнение
(} 1
и .
где и - модуль вектора, и Un,(J,- напряжения, пропоршональные составляющим действующей силы Pj, Р VJ и р., соответственно (выходные напряжения усилителей 3-5),
В первом и втором квадраторах 7 и 8 осуществляется возведение в квадрат напряжений Uа соответственно, Де- лители напряжения 9 и 1О осуществляю деление выходных напряжений квадратов сумму Uf U , сформированную в первом сумматоре 11, а сумма . всех членов правой части приведенного уравнения формируется в сумматоре 12, выход которого является первым выходом 13 устройства, .
Реализация в предлагаемом устройстве для моделирования волоскового механорецептора возможности значительно более точного определения величины и направления вектора действующе силы в плоскости, перпендикулярной оси симметрии силовводящего элемента, а также реализация возможности определения величины и направления вектора действующей силы в пространстве позволяет приблизить модель к своему биологическому прототипу и расщирить сферу применения модели в системах тактильного и кинестетического очувствления адаптивных роботов. Формула изобретения
1, Устройство для моделирования волоЬ нового, механорецептора, содержащее
трехкомпонентный датчик механического воздействия, отличаюшеес .я тем, что, с целью повьпиения точности, в него дополнителгло введены три усилителя и блок вычисления модуля вектора действующей силы, причем первый, второй и третий выходы трехкомпонентного датчика механического воздействия через соответствующие усилители подключены к соответствуклцим входам блока вычисления модуЯя вектора действующей силы,
2, Устройство по п, 1, о т л и чающееся тем, что блок вычисления модуля вектора действующей силы содержит два делителя напряжения и два сумматоре, причем первый вход блока соединен с первым 1 входами первого и второго сумматоров, второй вход блока через первый квадратор подкл1очен к первому входу первого делителя напряжения, выход которого соединен с вторым входом второго сумматора, выход которого 5голяется выходо блока и подключен к второму входу первого сумматора, выход которого соединен с вторым входом первого делителя надряжения и первым входом второго делителя напряжения, третий вход блока через второй квадратор подключен к второму входу второго делителя напряженид, выход которого соединен с третьим входом второго сумматора.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 504929, кл. Q 01 Л 1/16, 1976, .
2,Патент США № 40001556,
кл. 235/151, опублик, 1977 (прототип).
№
fui.l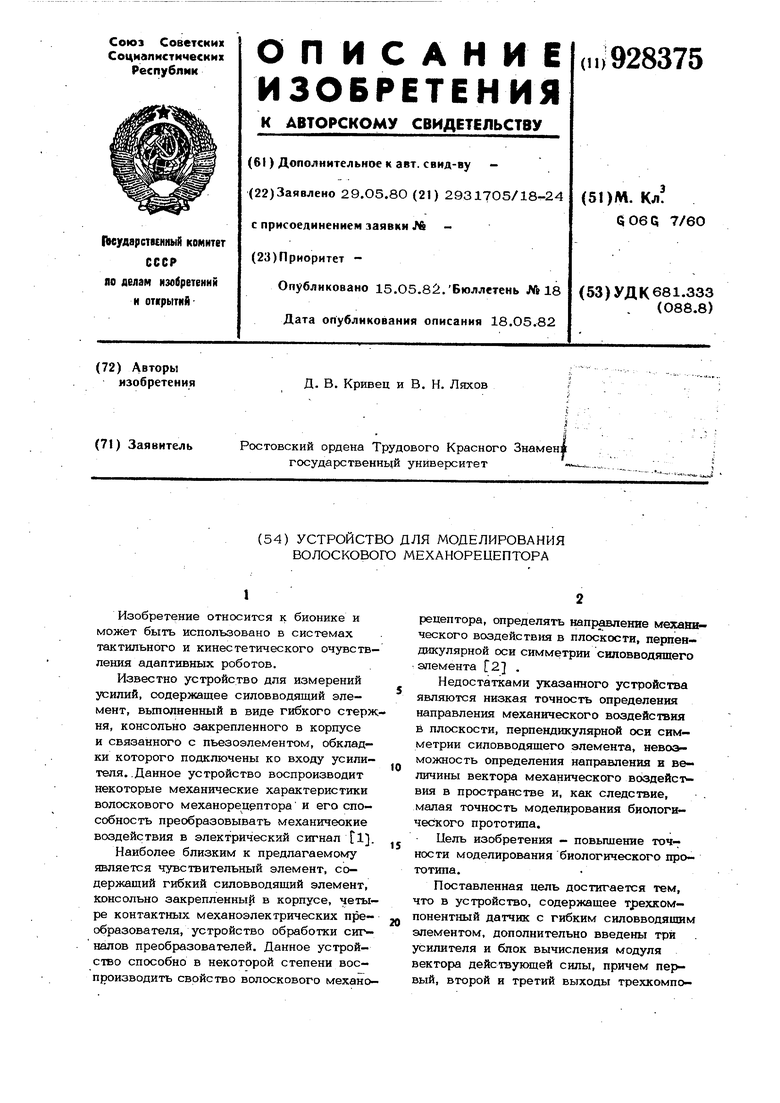

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения двухкритериальных задач нелинейного программирования | 1985 |
|
SU1252795A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УСКОРЕНИЯ | 2009 |
|
RU2401431C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| Датчик сил упругой деформации механизма и устройство для его настройки | 1985 |
|
SU1288511A1 |
| Магнитометр | 1980 |
|
SU935839A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Устройство для корреляционной обработки трехкомпонентных записей микросейсм | 1988 |
|
SU1594475A1 |
| Устройство для вычисления координат одномерного раскроя линейных неоднородных материалов | 1985 |
|
SU1312604A1 |
| Адаптивный цифровой фильтр | 1986 |
|
SU1387173A1 |
| Анализатор мореходных качеств судна | 1985 |
|
SU1298781A2 |