кости плода, которое меньше времени переходного процесса.
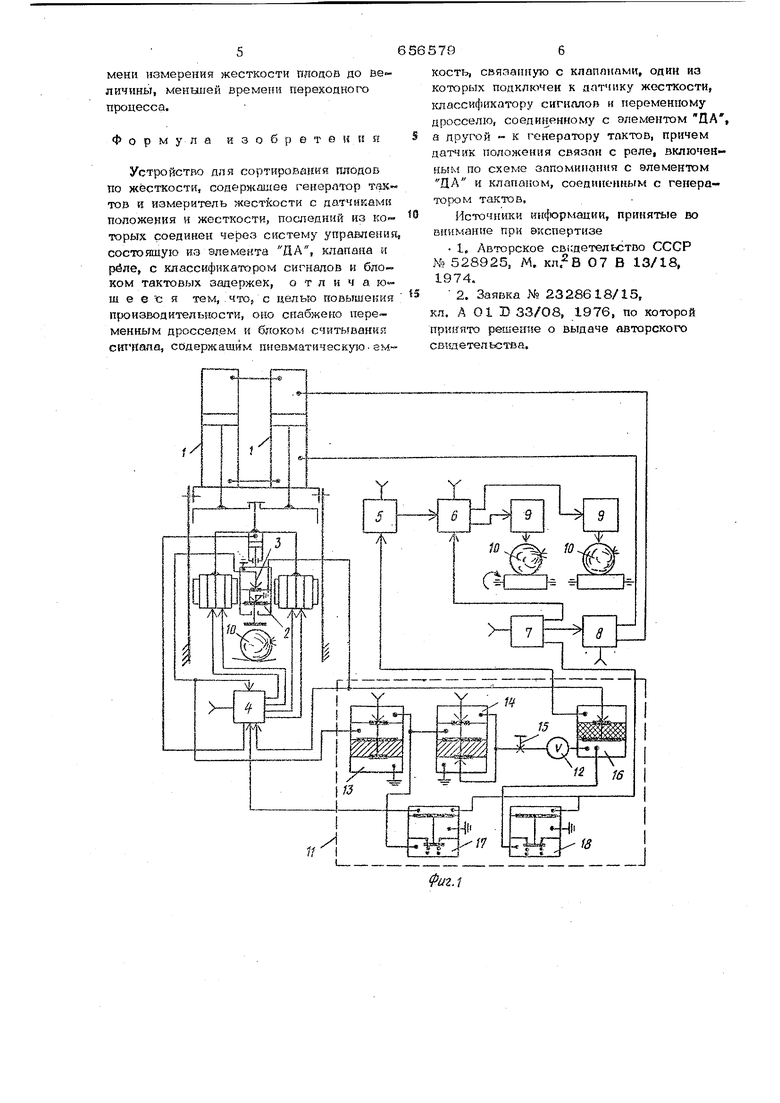
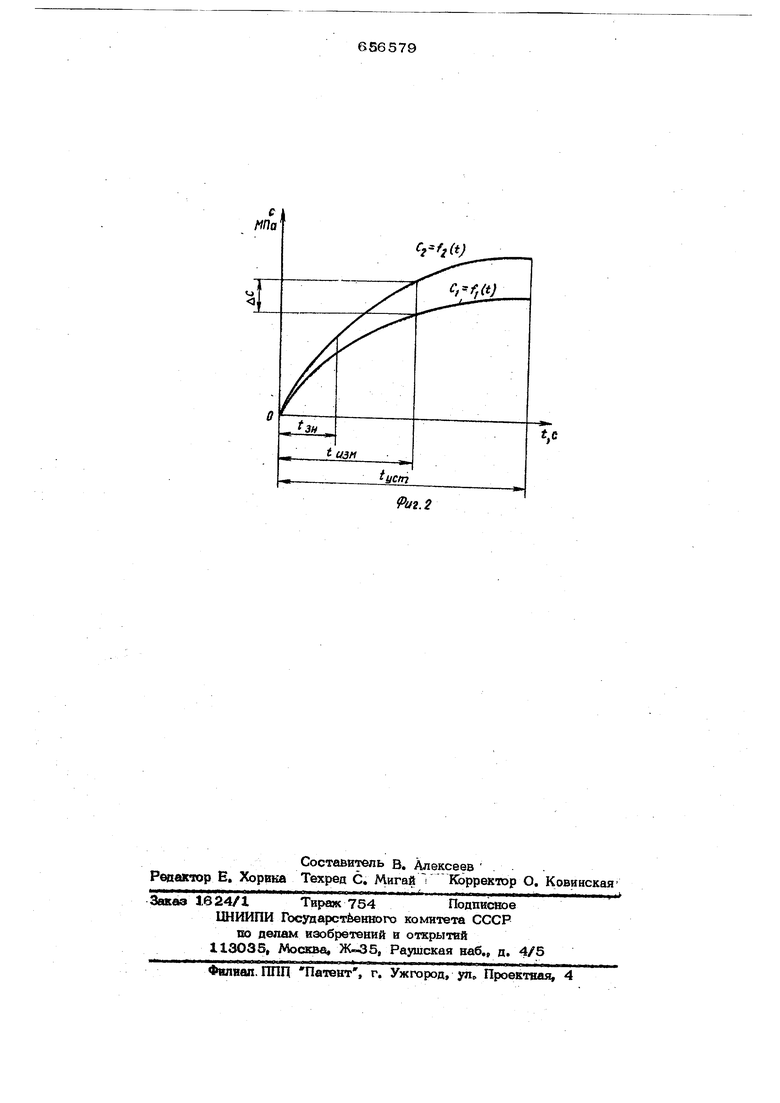
На фиг. 1 приведена схема предлага емого устройства для сортирования плодов по жесткости; на фиг . 2 - графики переходного процесса датчика жесткости KpacHot o и зеленого плодов, где д - f,j (i) и Ot,)- зависимости изменения жесткости красного и зеленого плодов Во вре мени при расчетной производительности устройства (одного канала) 1 плод/с.
Устройство (фиг. 1) содержит пневгугоцилиндры 1 двухстороннего действия, traмеритель жесткости, состоящий из датчика 2 жесткости и датчика 3 положения, систему 4 управления, классификатор 5 сигналов, блок 6 тактовых задержек, генератор 7 тактов, йапан 8 для переклю чения пневмоцилийдров 1 в крайних положениях, исполнительные механизмы 9 соответствующей фракции плодов 1О по спелости, блок 11 считывания сигнала жесткости в заданный момент времени, содер.жаший пневматическую емкость 12, репе 13, элемент ДА 14, переменный дроссель 15 и клапаны 16--18.
Устройство работает следующим образом.
Контролируемый плод 10 .подается к измерителю жесткости в тот момент, когда датчик 2 жесткости (в свою очередь, и датчик 3 Положения} находится в верх- нем положении. Далее клатхан 8 для переключения пневмоцилиндров 1 в крайн{сх положениях при появлении: тактового сиг нала, вырабатываемого генератором 7 тактов, переводит с помощью пневмоцилиндров 1 двухрторощюго действия датчик 2 жесткости к контролируемому плоду 1О. С момента фиксации датчика 2 жесткости система 4 управления связы вает измерительную камеру датчика 2 жесткости с магистралью питания, установившееся значение давления воздуха в которой пропорционально жесткости контролируемого плода. Затем сигнал жесткости Через клапан 16. блока 11 .считы вания сигнала постутгает в классификатор- 5 сигналов.
Увеличение производительности устройства достигается тем что блок 11 считывания сигнала реализует условие
где tvic-r - время переходного процесса;
изяА время передачи сигнала жёсткости;
t зн времй, определяюшее зону нечувствительности классификатора 5 сигналов.
Ввиду того, что кривые переходного процесса красных и зеленых плодов с f(-t)H С2 f (t имеют экспоненциальную зависимость, приведенное условие позволяет увеличить производительность одного канала с необходимой точностью измерения. В этом случае распознавание
плодов по жесткости достигается в интервале Дс, Практическое значение времени . измерения жесткости равно 0,35-0,5 с,При соприкасании датчика 2 жесткости с плодом сигнал от его начального размера, формируемый датчиком 3 положения, поступает в управляющую камеру реле 13, выход которого связан со входом клапана 17 и с положительной камерой элемента ПА 14 по схеме запоминания. С появлением единицы на выходе элемента ДА 14 начинается процесс наполнения емкости 12 через переменный дроссель 15. Одновременно давление духа подается на вход клапана 18 При исчезновении сигнала от датчика 3 полох ения в период измерения жесткости процесс считывания сигнала жесткости не прекращается ввиду запомикания единицы на выходе реле 13 Через определен№тй промежуток Времени, равный времени передачи сигнала жесткости клапан 16 разобщает магистраль классификатора 5 сигналов. Обработанный в классификаторе 5 фиксированный сигнал поступает через блок 6 такговых задержек к исполнительному механизму 9 соотвегствуюшей фракции.
НастроШса блока 11 считывания сигнала на требуе-мое время передачи сигнала осуществляется с помощью переменного дросселя 15 и пневмоемкости 12.
После процесса измерения генератор 7 тшстов о помошыо клапана 8 для переключения пкевмоципшщров 1 в крайних положениях переводит датчик 2 жесткости в исходное положение, а клапаны 17 и 18 сообщают сатмосферой положительную камеру элемента ДА 14 и отрицательную камеру клапана 16.
С появлением нового плода цикл повторяется.
Требуемое число аналогичньГх каналов в устройстве определяют, исходя из выбранной производительности.
В данном устройстве для сортирования плодов по жесткости повышение производительности достигается сокращением времени измерения жесткости плодов до величины, MeHiiiieft времени переходного процесса.
Формула изобретения
Устройство для сортирования плодов по жёсткости, содержащее генератор так ТОО и иамеригель жесткости с датчиками положения и жесткости, последний из ко« торых соединен через систему управления состоящую из элемента ДА, клапана и рбле, с классификатором сигналов и блоком тактовых задержек, о т л и ч а ю ш е е С я тем, . что. с целью повышения производительности, оно снабжено переменным дросселем и блоком считывания ситиапа, содерхощим пневматическую, емкость, связанную с клапанами, один из которых подключен к датчику жесткости, тшассификатору сигналов н переменному дросселю, соединенному с элементом ПА, а другой - к генератору тактов, причем датчик положения связан с реле, включенны { по схеме запоминания с элементом ДА и клапаном, соединенным с генератором тактов,
Источники нн4ормадии, принятые во
внимание при экспертизе
1. Авторское сВ1:детельстпо СССР № 528925, М. кл.В 07В 13/18, 1974. 2. Заявка № 2328618/15,
кл. А О1 D 33/О8, 1976, по которой принято решение о выдаче авторского свшетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортирования плодов пожЕСТКОСТи | 1977 |
|
SU835337A1 |
| Устройство для определения жесткости плодов | 1976 |
|
SU615415A1 |
| Автомат для сортирования яиц по весу | 1971 |
|
SU441728A1 |
| Автомат для сортирования яиц по весу | 1970 |
|
SU371744A1 |
| Устройство для измерения жесткости сосковых трубок доильных стаканов | 1985 |
|
SU1353365A1 |
| Установка для сортирования плодов по их физико-механическим свойствам | 1972 |
|
SU522845A1 |
| Установка для сортирования плодов по их физико-механическим свойствам | 1974 |
|
SU528925A1 |
| Пневматическое устройство управленияяйцЕСОРТиРОВАльНОй МАшиНОй | 1979 |
|
SU795526A1 |
| Пневматический весовой дозатор | 1988 |
|
SU1610304A1 |
| Устройство для сортирования плодов по качеству | 1976 |
|
SU570358A1 |
/Т И I I п
fat. 2
