1
Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в устройствах для сортирования плодов, например томатов, по спелости.
Известно устройство для сортирования плодов по жесткости, включающее измеритель жесткости с пневмодеформатором, датчиком жесткости и внутренними фиксаторами, систему управления, содержащую пневмореле, пневмоклапаны и исполнительные механизмы ,1.
Недостатком этого устройства является низкая производительность выраженная необходимостью измерения жесткости плодов во времени до установившегося ее значения.
Известно также устройство для сортирования плодов по жесткости включающее измеритель жесткости с пневмодеформатором, датчиком жесткости и внутренними фиксаторами, систему управления, содержащую пневмореле, пневмоклапаны, блок считывания сигнала и исполнительные механизмы 2.
Недостатком этого устройства является низкая надежность, выраженная наличием на каждом канале отдельного блока считывания сигнала, что усложняет проведение настройки устройства в пелом и увеличивает число пневмоэлементов.
Целью изобретения является повышение надежности устройства.
Достигается это тем, что пневмодеформатор выполнен в виде упругого сйльфона со штоком, а система управления содержит пйевмоконденсатор, соединенный с упругим сильфоном через пневмореле и пневмоклапан, которые подключены к блоку считывания сигнала, при этом шток упругого сильфона размещен между внутренними фиксаторами.
Такое выполнение устройства позволяет наряду с уменьшением числа пневмоэлементов за счет использования одного блока
считывания увеличить разность жесткостей красных, зеленых и некондиционных (гнилых, переспелых и поврежденных при машинной уборке) плодов с помощью физического явления, основанного на той концепции, что с увеличением деформации плода приложенная нагрузка, равная произведению давления воздуха на эффективную площадь упругого сйльфона, пропорционально умепьщается за счет действия упругой силы сйльфона.
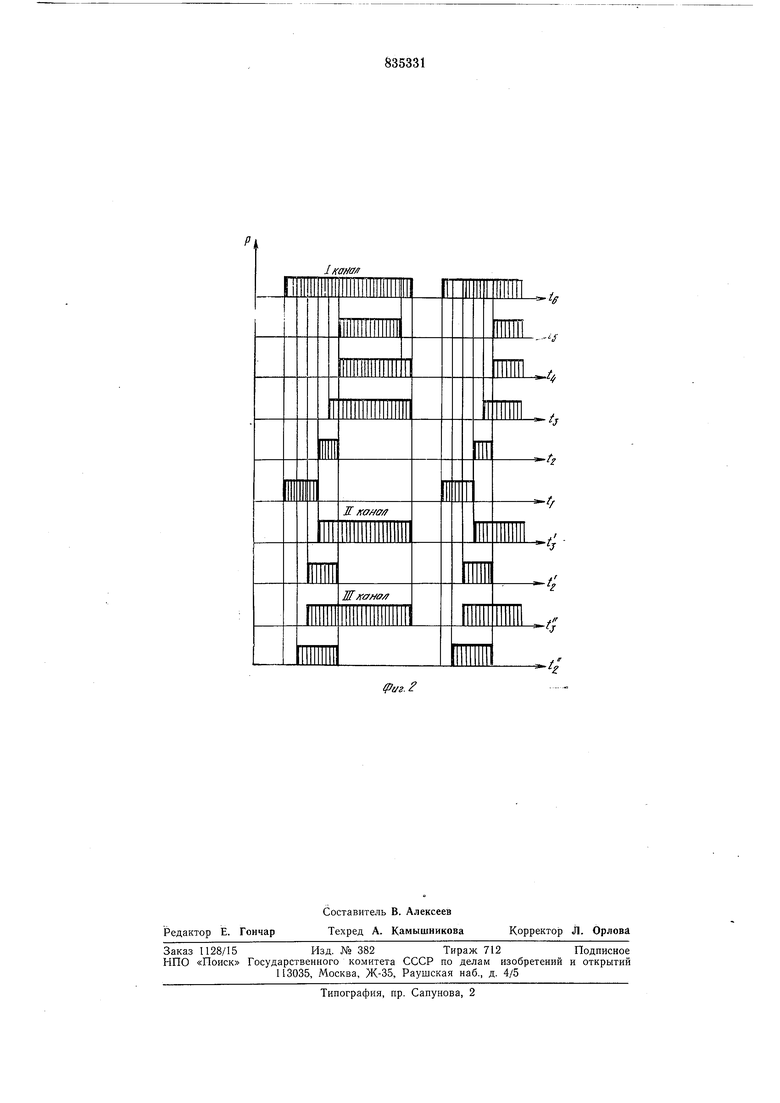
На фиг. 1 приведена схема трехканального устройства для сортирования плодов по жесткости; на фиг. 2 - циклограмма работы устройства.
Устройство включает пневмоцилиндры 1, генератор 2 тактов с пневмораспределителем, датчики 3, 4 положения и жесткости, жестко соединеииые с пневмодеформатором, выполненным в виде упругого сильфона 5, систему управления, содержащую пневмоконденсатор 6, соединенный с упругим сильфоном 5 через пневмореле 7, и пневмоклапан 8, шток 9 упругого сильфона 5, блок 10 считывания сигнала, пневмоклапаны И и 12, пневмореле 13, регулируемые пневмосопротивления 14 и 15, наружные и внутренние фиксаторы 16 и 17, установленные на раме 18 измерителя жесткости, классификатор 19 пневматических сигналов, блок 20 тактовых задержек и исполнительные механизмы 21.
На фиг. 2 приняты следующие обозначения: ti-время перемещения датчика жесткости из верхнего в нижнее положение, /2 -время действия сигнала датчика положения 1-го канала, ta - время фиксированного положения штока пневмодеформатора 1-г.о канала, 4 - время измерения жесткости, 5 - время разряда пневмоконденсатора te - время действия тактового сигнала, 2 и tz - время действия сигнала датчиков положения 2 и 3-го каналов, ts и ta - время фиксированного положения штока пневмодеформаторов 2 и 3-го каналов.
Устройство работает следующим образом. После подачи контролируемого плода к датчику 4 жесткости генератор 2 тактов одновременно вырабатывает сигнал, под действием которого пневмоцилиндры 1 вводят датчик 3 положения в контакт с плодом. С появлением на выходе датчика 3 положения единичного сигнала переключается пневмоклапан 11, выход которого соединен с пневмоклапаном 12, наружными и внутренними фиксаторами 16 и 17, установленными на раме 18, и пневмореле 13. Срабатывают фиксаторы 16 и 17, и пневмореле 13, соединяющие измерительную камеру датчика 4 жесткости через регулируемое сопротивление 14 с магистралью питания и классификатором 19 пневматических сигналов. Одновременно сигнал на выходе блока 10 считывания сигнала переключает пневмоклапан 8, разобщающий магистраль питания с пневмоконденсатором 6, а затем - пневмореле 7. Происходит разряд пневмоконденсатора 6, при котором через определенный промежуток времени, меньшем времени измерения жесткости, наступает равновесное состояние давления воздуха в упругом снльфоне 5 и пневмоконденсаторе 6. Величина давления воздуха в равновесном состоянии зависит от жесткости плодов и тем больше, чем больше жесткость плодов. При этом необходимым условием является опережение времени разряда пневмоконденсатора 6 от времени измерения жесткости, что позволяет получить сглаженный и усиленный пневматический сигнал на выходе датчика 4 жесткости, который поступает в классификатор 19 пневматических сигналов, а затем через блок 20 тактовых задержек -- к исполнительным механизмам 21.
В качестве блока 10 считывания сигнала может быть использован генератор тактов, но формирующий управляющий сигнал для всех каналов с запаздыванием во времени
от сигнала основного генератора 2 тактов, струйный датчик положения штока пневмоцилиндра или измеритель времени.
Время запаздывания, равное разности времен от начала цикла до начала измерения жесткости, зависит от размера плодов. На плодах с большим размером, например, на 2 и 3-м каналах, время действия сигнала датчика 3 положения наступает раньще, вследствие чего время фиксированного положения штока 9 пневмодеформатора также будет больше, чем на плодах с минимальным размером. Однако время измерения жесткости остается постоянным независимо от размера плодов, так как блок 10
считывания сигнала срабатывает лишь после соприкосновения датчиком 3 положения наименьшего плода, вследствие чего достигается необходимая точность измерения жесткости на плодах всех размеров.
Таким образом, с помощью одного блока 10 считывания сигнала можно управлять процессом измерения жесткости нескольких каналов, число которых определяется в зависимости от производительности устройства.
Данное устройство позволяет снизить затраты труда на настройку функциональных блоков каждого канала за счет применения одного общего блока считывания сигнала, позволяющего повысить надежность автоматической системы сортирования, а разработанная схема измерителя жесткости и конструкции устройства позволяет уменьшить габаритные размеры с одновременным снижением требований к точности изготовления деталей, увеличить разность жесткости красных и зеленых плодов и разрешающую способность системы.
Формула изобретения
Устройство для сортирования плодов по жесткости, включающее измеритель жесткости с пневмодеформатором, датчиком жесткости и внутренними фиксаторами, систему управления, содержащую пневмореле, пневмоклапаны, блок считывания сигнала и исполнительные механизмы, отличающееся тем, что, с целью повышения надежности, пневмодеформатор выполнен в виде упругого сильфона со штоком, а система управления содержит пневмоконденсатор, соединенный с упругим сильфоном через пневмореле и пневмоклапан, которые
подключены к блоку считывания сигнала,
Sб
при этом liltok упругого сйльфона размещенпо заявке № 2328619/15, кл. А 01D 33/08,
между внутренними фиксаторами.1976.
Источники информации,2. Авторское свидетельство СССР
принятые во внимание ири экспертизепо заявке № 2395656/15, кл. А 01D 33/08,
1. Авторское свидетельство СССР5 1976.
835337

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения жесткости плодов | 1976 |
|
SU615415A1 |
| Устройство для сортирования плодов по жесткости | 1976 |
|
SU656579A1 |
| Манипулятор к доильным аппаратам | 1982 |
|
SU1113055A1 |
| Индивидуальный дозатор корма в зависимости от величины надоя | 1985 |
|
SU1416090A1 |
| Индивидуальный дозатор корма | 1988 |
|
SU1590059A1 |
| Устройство для управления доильным аппаратом | 1989 |
|
SU1811779A1 |
| Устройство для измерения жесткости сосковых трубок доильных стаканов | 1985 |
|
SU1353365A1 |
| Индивидуальный дозатор-увлажнитель корма | 1988 |
|
SU1674753A1 |
| Пневматический весовой дозатор | 1988 |
|
SU1610304A1 |
| Пневматический весовой дозатор непрерывного действия | 1985 |
|
SU1278597A1 |
Ш ffcfHo/f
