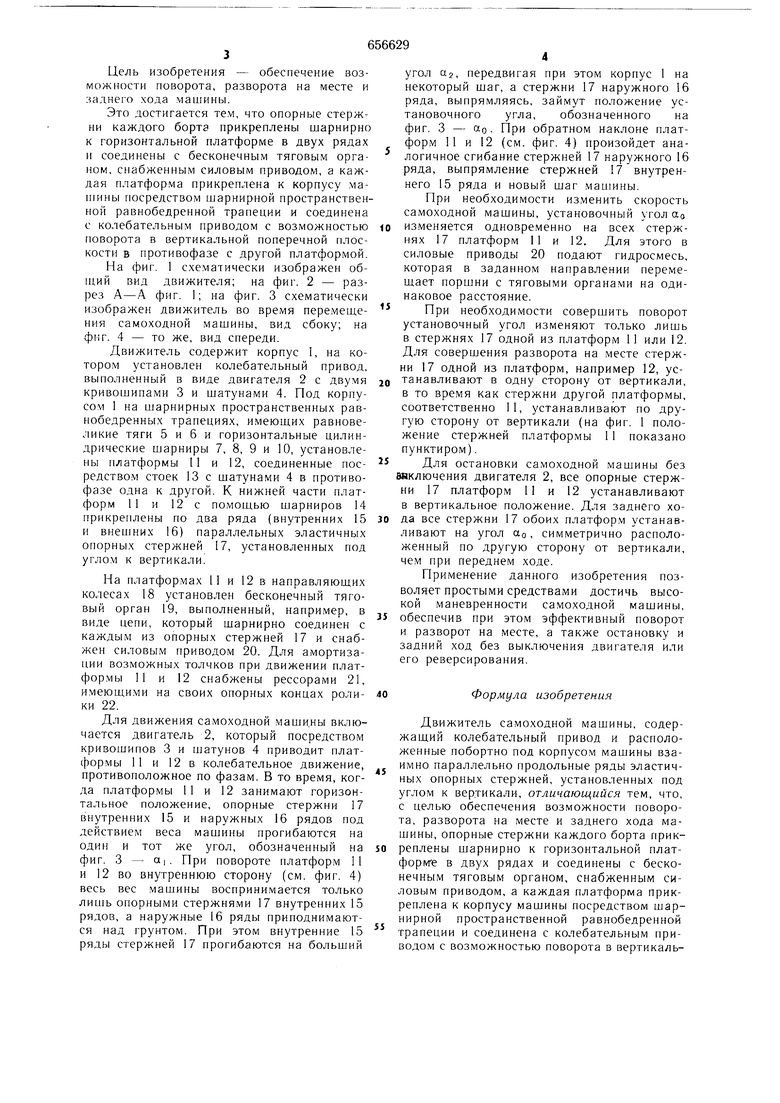
(54) ДВИЖИТЕЛЬ САМОХОДНОЙ /VlAШИHЫ Цель изобретения - обеспечение возможности поворота, разворота на месте и заднего хода машины. Это достигается тем, что опорные стержни каждого борта прикреплены шарнирно к горизонтальной платформе в двух рядах и соединены с бесконечным тяговым органом, снабженным силовым приводом, а каждая платформа прикреплена к корпусу машины посредством шарнирной пространственной равнобедренной трапеции и соединена с колебательным приводом с возможностью поворота в вертикальной поперечной плоскости в противофазе с другой платформой. На фиг. 1 схематически изображен общий вид движителя; на фиг. 2 - разрез А-А фиг. 1; на фиг. 3 схематически изображен движитель во время переметения самоходной машины, вид сбоку; на фиг. 4 - то же, вид спереди. Движитель содержит корпус 1, на котором установлен колебательный привод, выполненный в виде двигателя 2 с двумя кривошипами 3 и шатунами 4. Под корпусом 1 на шарнирных пространственных равнобедренных трапециях, имеюш,их равновеликие тяги 5 и 6 и горизонтальные цилиндрические шарниры 7, 8, 9 и 10, установлены платформы 11 и 12, соединенные посредство.м стоек 13 с шатунами 4 в противофазе одна к другой. К нижней части платформ 11 и 12 с помондью шарниров 14 прикреплены по два ряда (внутренних 15 и внешних 16) параллельных эластичных опорных стержней 17, установленных под углом к вертикали. На платформах 11 и 12 в направляющих колесах 18 установлен бесконечный тяговый орган 19, выполненный, например, в виде цепи, который шарнирно соединен с каждым из опорных стержней 17 и снабжен силовым приводом 20. Для амортизации возможных толчков при движении платформы 11 и 12 снабжены рессорами 21, имеющими на своих опорных концах ролики 22. Для движения самоходной машины включается двигатель 2, который посредством кривошипов 3 и шатунов 4 приводит платформы 11 и 12 в колебательное движение, противоположное по фазам. В то время, когда платформы 11 и 12 занимают горизонтальное положение, опорные стержни 17 внутренних 15 и наружных 16 рядов под действием веса машины прогибаются на один и тот же угол, обозначенный на фиг. 3 - а|. При повороте платформ 11 и 12 во внутреннюю сторону (см. фиг. 4) весь вес машины воспринимается только лишь опорными стержнями 17 внутренних 15 рядов, а наружные 16 ряды приподнимаются над грунтом. При этом внутренние 15 ряды стержней 17 прогибаются на больший угол 0.2, передвигая при этом корпус 1 на некоторый шаг, а стержни 17 наружного 16 ряда, выпрямляясь, займут положение установочного угла, обозначенного на фиг. 3 - «о- При обратном наклоне платформ 11 и 12 (см. фиг. 4) произойдет аналогичное сгибание стержней 17 наружного 16 ряда, выпрямление стержней 17 внутреннего 15 ряда и новый шаг машины. При необходимости изменить скорость самоходной машины, установочный угол ао изменяется одновременно на всех стержнях 17 платформ 11 и 12. Для этого в силовые приводы 20 подают гидросмесь, которая в заданном направлении перемещает поршни с тяговыми органа.ми на одинаковое расстояние. При необходимости совершить поворот установочный угол изменяют только лишь в стержнях 17 одной из платформ 11 или 12. Для совершения разворота на месте стержни 17 одной из платформ, например 12, устанавливают в одну сторону от вертикали, в то время как стержни другой платфор.мы, соответственно 11, устанавливают по другую сторону от вертикали (на фиг. 1 положение стержней платформы 11 показано пунктиром). Для остановки самоходной машины без аключения двигателя 2, все опорные стержни 17 платформ 11 и 12 устанавливают в вертикальное положение. Для заднего хода все стержни 17 обоих платформ устанавливают на угол ао, симметрично расположенный по другую сторону от вертикали, чем при переднем ходе. Применение данного изобретения позволяет простыми средствами достичь высокой маневренности самоходной машины, обеспечив при этом эффективный поворот и разворот на месте, а также остановку и задний ход без выключения двигателя или его реверсирования. Формула изобретения Движитель самоходной машины, содержащий колебательный привод и расположенные побортно под корпусом машины взаимно параллельно продольные ряды эластичных опорных стержней, установленных под углом к вертикали, отличающийся тем, что, с целью обеспечения возможности поворота, разворота на месте и заднего хода машины, опорные стержни каждого борта прикреплены шарнирно к горизонтальной платфорлге в двух рядах и соединены с бесконечным тяговым органом, снабженным силовым приводом, а каждая платформа прикреплена к корпусу машины посредством шарнирной пространственной равнобедренной трапеции и соединена с колебательным приводом с возможностью поворота в вертикаль

| название | год | авторы | номер документа |
|---|---|---|---|
| Движитель самоходной машины | 1981 |
|
SU962086A1 |
| Движитель транспортного средства | 1986 |
|
SU1421598A1 |
| ШАГАЮЩИЙ ХОД И САМОХОДНАЯ МАШИНА НА ЕГО ОСНОВЕ | 2011 |
|
RU2452647C1 |
| УСТРОЙСТВО ДЛЯ РАЗРУШЕНИЯ КОРКИ ЭЛЕКТРОЛИТА В ЭЛЕКТРОЛИЗЕРАХ ДЛЯ ПОЛУЧЕНИЯ АЛЮМИНИЯ | 2006 |
|
RU2323274C1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| МИННЫЙ ЗАГРАДИТЕЛЬ | 2007 |
|
RU2339895C1 |
| САМОХОДНАЯ АРТИЛЛЕРИЙСКАЯ СОЧЛЕНЕННАЯ УСТАНОВКА | 2008 |
|
RU2388987C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ ТРАКТОР | 2013 |
|
RU2545216C1 |
| Беспилотный тягово-энергетический модуль сельскохозяйственного назначения и способ его агрегатирования с сельскохозяйственными машинами | 2022 |
|
RU2805880C1 |
| КОМПЛЕКС ДЛЯ ПОДВОДНОЙ ДОБЫЧИ ПОЛЕЗНОГО ИСКОПАЕМОГО | 1999 |
|
RU2168633C2 |
