1
Изобретение относится к транспортным средствам с движителями иными, чем обычные колеса или гусеницы, и в частности, к движителям шагающего типа.
Известен движитель самоходной машины, содержащий привод с дебалансами и расположенные побортно под корпусом машины продольные ряды параллельных упругих опорных стержней, установленных под углом к вертикали 1.
Недостатками известного движителя являются колебательное движение корпуса и невозможность изменения направления его движения.
Наиболее близким к предлагаемому является движитель самоходной мащины, содержащий горизонтальные платформы с наклонными в одну сторону к вертикали отходящими вниз упругими опорными стержнями, и привод качательного движения разных платформ в разных фазах 2.
Такой движитель позволяет транспортному средству двигаться без существенных колебаний корпуса и осуществлять поворот в любую сторону, однако изменение направления движения сопровождается разворотом корпуса транспортного средства, что в
стесненных условиях уменьшает его маневренность.
Цель изобретения - повышение маневренности в стесненных условиях.
Поставленная цель достигается тем, что 5 движитель снабжен параллельно расположенными кривошипами, установленными в каждой горизонтальной платформе на вертикальных цилиндрических шарнирах, к концам кривошипов жестко прикреплены опорные стержни, оси цилиндрических шарниров проходят через точки контакта опорных стержней с грунтом, а под каждой горизонтальной платформой смонтирована площадка, шарнирно соединенная с концами кривошипов, связанная с механизмом ее плоско-параллельного вращения.
15
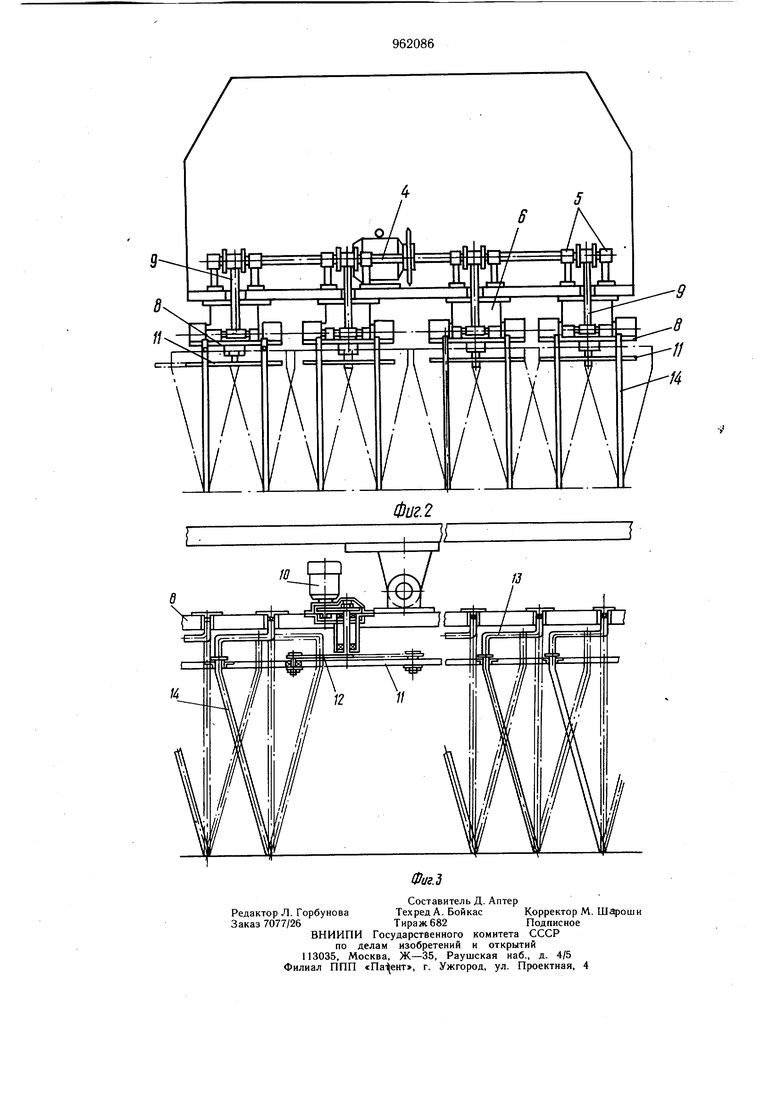
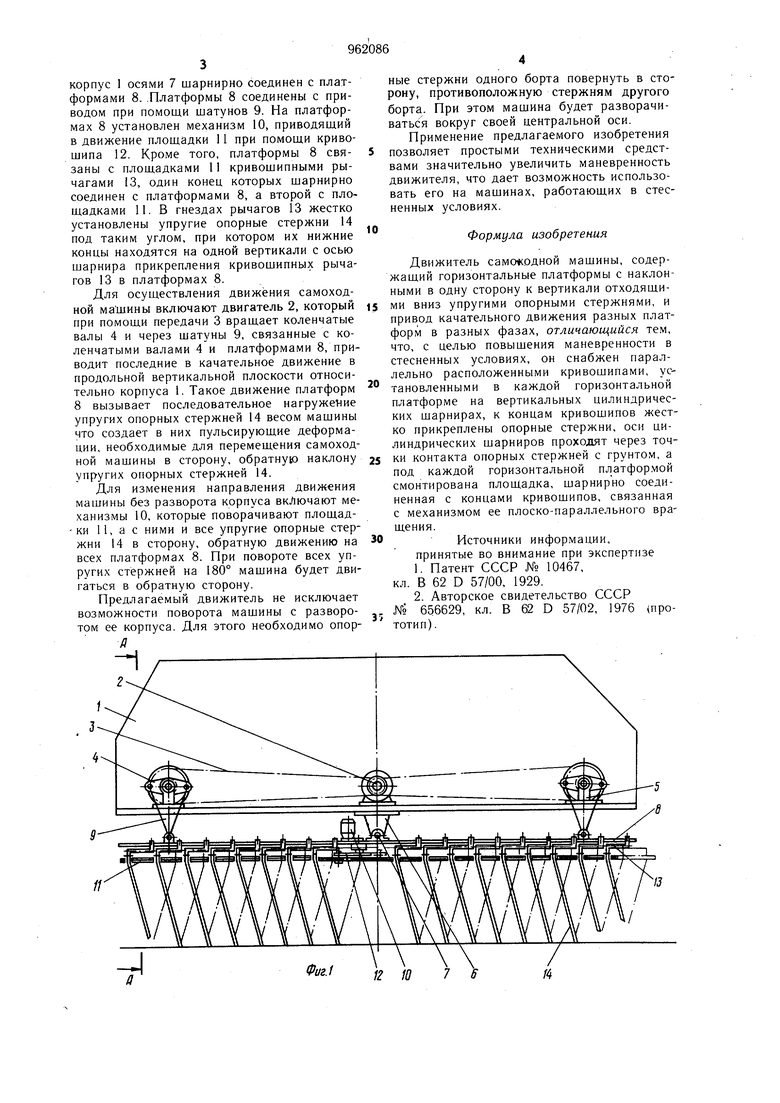
На фиг. 1 изображена самоходная машина, обший вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - привод плоско-параллельного вращения площадки с кривощипами.
20
.Самоходная машина содержит корпус 1, на котором установлен привод, состоящий из двигателя 2, передачи 3, коленчатых валов 4, установленных на подшипниках 5, а также кронштейны 6, посредством которых
корпус 1 осями 7 шарнирно соединен с платформами 8. .Платформы 8 соединены с приводом при помощи шатунов 9. На платформах 8 установлен механизм 10, приводящий в движение площадки 11 при помощи кривошипа 12. Кроме того, платформы 8 связаны с площадками 11 кривошипными рычагами 13, один конец которых шарнирно соединен с платформами 8, а второй с площадками 11. В гнездах рычагов 13 жестко установлены упругие опорные стержни 14 под таким углом, при котором их нижние концы находятся на одной вертикали с осью шарнира прикрепления кривошипных рычагов 13 в платформах 8.
Для осуществления движения самоходной машины включают двигатель 2, который при помощи передачи 3 вращает коленчатые валы 4 и через шатуны 9, связанные с коленчатыми валами 4 и платформами 8, приводит последние в качательное движение в продольной вертикальной плоскости относительно корпуса 1. Такое движение платформ 8 вызывает последовательное нагружение упругих опорных стержней 14 весом мащины что создает в них пульсирующие деформации, необходимые для перемещения самоходной машины в сторону, обратную наклону упругих опорных стержней 14.
Для изменения направления движения машины без разворота корпуса включают механизмы 10, которые поворачивают площад- ки 11, а с ними и все упругие опорные стержни 14 в сторону, обратную движению на всех платформах 8. При повороте всех упругих стержней на 180° мащина будет двигаться в обратную сторону.
Предлагаемый движитель не исключает возможности поворота машины с разворотом ее корпуса. Для этого необходимо опорные стержни одного борта повернуть в сторону, противоположную стержням другого борта. При этом машина будет разворачиваться вокруг своей центральной оси.
Применение предлагаемого изобретения позволяет простыми техническими средствами значительно увеличить маневренность движителя, что дает возможность использовать его на мащинах, работающих в стесненных условиях.
Формула изобретения
Движитель самородной машины, содержащий горизонтальные платформы с наклонными в одну сторону к вертикали отходящими вниз упругими опорными стержнями, и привод качательного движения разных платформ в разных фазах, отличающийся тем, что, с целью повыщения маневренности в стесненных условиях, он снабжен параллельно расположенными кривошипами, установленными в каждой горизонтальной платформе на вертикальных цилиндрических шарнирах, к концам кривошипов жестко прикреплены опорные стержни, оси цилиндрических шарниров проходят через точки контакта опорных стержней с грунтом, а под каждой горизонтальной платформой смонтирована площадка, шарнирно соединенная с концами кривошипов, связанная с механизмом ее плоско-параллельного вращения.
Источники информации,
принятые во внимание при экспертизе
1.Патент СССР № 10467, кл. В 62 D 57/00, 1929.
2.Авторское свидетельство СССР
Я 656629, кл. В 62 D 57/02, 1976 (прототип).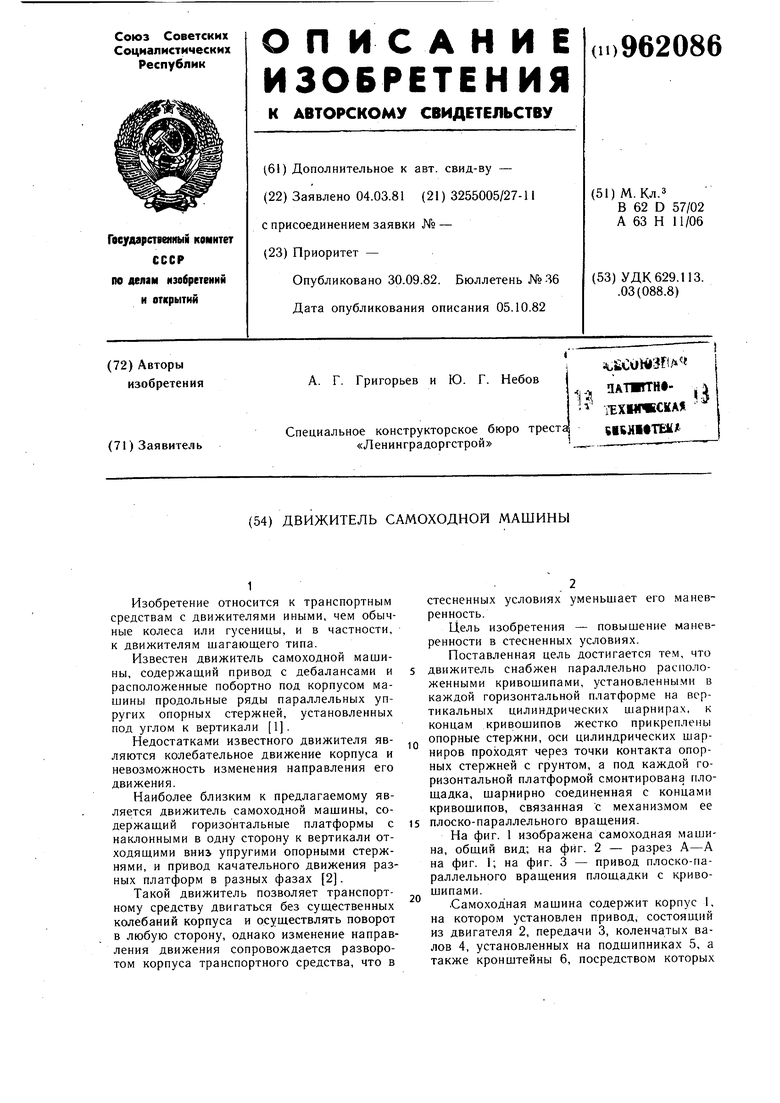
| название | год | авторы | номер документа |
|---|---|---|---|
| Движитель самоходной машины | 1976 |
|
SU656629A1 |
| СИММЕТРИЧНЫЙ ТРЁХКООРДИНАТНЫЙ ДВИЖИТЕЛЬ С ЛИНЕЙНО-СКОЛЬЗЯЩЕЙ ОПОРОЙ И ВСТРАИВАЕМЫМ УСТРОЙСТВОМ УПРАВЛЕНИЯ, И СИММЕТРИЧНАЯ ШАГАЮЩАЯ ПЛАТФОРМА НА ЕГО ОСНОВЕ | 2016 |
|
RU2643613C2 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2008 |
|
RU2368529C1 |
| ШАГАЮЩАЯ ОПОРА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2001 |
|
RU2207283C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА ШАГАЮЩЕМ ДВИЖИТЕЛЕ | 1991 |
|
RU2049696C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2011 |
|
RU2483937C1 |
| САМОХОДНАЯ АМФИБИЙНАЯ ПЛАТФОРМА НА ВОЗДУШНОЙ ПОДУШКЕ | 2007 |
|
RU2345916C1 |
| Устройство для очистки корпуса судна | 1983 |
|
SU1134473A1 |
| Многоопорный шагающий движитель | 1990 |
|
SU1801854A1 |
| СЕКЦИОННОЕ УПРУГОСГИБАЕМОЕ СУДНО, ЕГО КАЧЕПРИВОДНОЙ ДВИЖИТЕЛЬ И СПОСОБ ДОСТАВКИ ГРУЗОВ МОРЕМ С ИСПОЛЬЗОВАНИЕМ ЭНЕРГИИ ВОЛН | 2007 |
|
RU2356783C2 |