1
Изобретение относится к грузоподъемйЬ1М механизмам.
Известен винтовой механизм, с помощью которого можно перемещать (поднимать и опускать) груз в пространстве, содержащий вращающийся грузовой винт, выдвижную трубку с грузовой гайкой на конце, перемещаемую внутри наружной трубы 1.
В этом винтовом механизме щпоночный паз выполнен на несущей груз выдвижной трубе, а щпонка закреплена на наружной трубе. При таком исполнении винтового механизма снижается прочность выдвижной трубы, так как она ослаблена шпоночным. пазом, снижается точность фиксации трубы от поворота и увеличивается трение при ее перемещении, так как шпонка расположена близко к оси выдвижной трубы.
Наиболее близким к изобретению по своей технической сущности является винтовой механизм, содержащий .вращающийся от привода грузовой винт, выдвижную трубу с грузовой гайкой и с закрепленным на ней фиксирующим устройством, наружную трубу с продольным пазом под шпонку, закрепленную на грузовой гайке 2).
i, Однако с помощью данного механизма
нельзя обеспечить перемещение- груза по заданному радиусу окружности и одновременного его подъема или опускания на заданный уровень.
Целью изобретения является обеспече ние перемещения груза по заданному радиусу окружности и одновременного его опускания или подъема на заданный уровень. Указанная цель достигается тем, что фиксирующее устройство снабжено держа-телем груза, закрепленным на выдвижной трубе, а на наружной трубе выполнены сквозные продольные пазы под шпонку, расположенные с разными шагами, а между ними за, креплены подпружиненные снизу кулачки со скощенной торцовой гранью, при этом иачало скоса грани на каждом кулачке совпадает с торцовой поверхностью наружной трубы между пазами и на верхней части наружной трубы выполнена цилиндрическая выточка с установленными в ней цилиндрической пружиной и резьбовой втулкой.
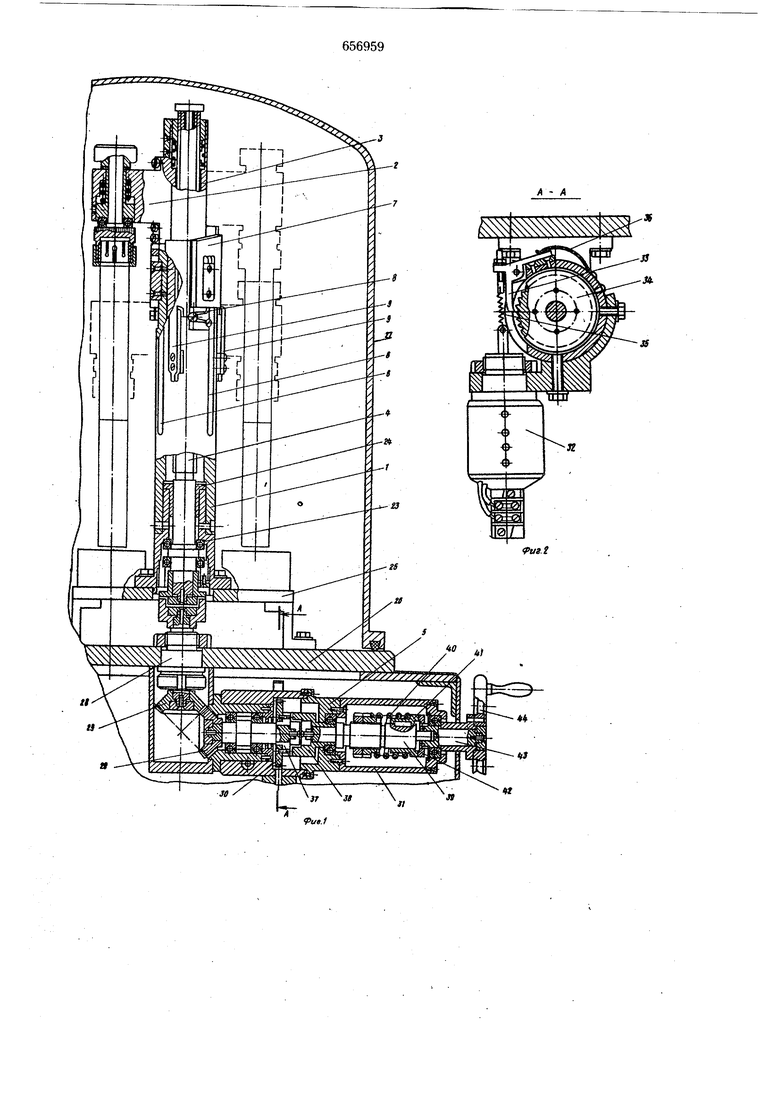
На фиг. 1 изображен винтовой механизм в продольном разрезе; на фиг. 2 -- разрез А-А на фиг. 1; на фиг. 3 - держатель
груза с выдвижной трубой и с грузовой гайкой, вставленных в, наружную трубу (гГродольный разрез); на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - развертка боковой поверхности части наружной трубы с пазами ис прикрепленными кулачками, а также с контактными группами для сигнализации и блокировки; на фиг. 6 - разрез В-В на фиг. 5.
Винтовой механизм для перемещения состоит из толстостенной наружной трубы 1, держателя 2 груза, выдвижной трубы 3 с грузовой гайкой, грузового винта 4 и привода 5. На стенке наружной трубы I выполнены три сквозных продольных паза 6, размешенных равномерно по окружности.
На поверхности наружной трубы 1 с возможностью перемещения прикреплены два кулачка 7, каж,дын из которых с помощью пружины 8 кручения подпружинен снизу. Торцовые части наружной трубы 1 между пазами расположены на разной высоте, а торцовая часть каждого кулачка 7 выполнена со скошенной гранью. Каждый кулачок 7 прикреплен к корпусу I таким образом, что начало уклона скошенной грани совпадает с торцовой частью поверхности наружной трубы 1, на котором он прикреплен, а верхняя точка грани на кулачке располагается на одном уровне с соседней торцовой частью поверхности трубы.
В каждом промежутке между базами наружной трубы 1 прикреплены также контактные группы 9, предназначенные для электрической сигнализации и блокировки. Каждая контактная группа 9 состоит из контактной пружинь 10 и плоского контакта 11 с отогнутым концом. На конце каждой контактной пружины 10 прикреплен фиксатор 2-из фторопласта - 4, вставленный свободно в предусмотренные отверстия на трубе 1.
Выдвижная труба 3 с грузовой гайкой выполнена в форме цилиндрического пол.зуна, наружный диаметр которого подогнан но трубе I. На выдвижной трубе с грузовой гайкой имеется продольный паз 13, куда заходит фиксатор 12 в рабочем положении держателя груза. Последний состоит из корпуса 14, который через выступ на его боковой поверхности, выполненный в форме призматической шпонки, крепится к выдвижной трубе с грузовой гайкой и благодаря этому может устанавливаться в фиксированном положении в любом из трех пазов трубы 1.
.В корпус И вставлена цанга. 15 в рправке 16, которая установлена в упорном шарикоподшипнике 17 и хвостовой своей частью пставлена в подпружиненную втулку 18, установленную в свою очередь, в цилиндрическую выточку корпуса 14.
На верхней части выдвижной трубы 3 с грузовой гайкой предусмотрена цилиндрическая выточка 19, куда вставлены цилиндрическая пружина 20 и резьбовая втулка 21,
навернутая на грузовой винт 4 и обеспечивающая под действием пружины 20 необ ходимый момент трения в винтовой паре. Положение резьбовой втулки 21 в сборе с пружиной 20, вставленной в цилиндрическую выточку выдвижной трубы, фиксируется с помощью вкладыша 22.
Грузовой винт 4 в трубе 1 установлен в двух упорных шарикоподшипниках 23 и в подшипнике скольжения 24, размещенных в нижней части наружной трубы. Последняя
0 крепится через свой фланец к плате 25, прикрепленной, в свою очередь, через свои лапки к плите 26, на который устанавливается вакуумлый колпак 27.
Через муфту или зубчатую передачу при-, вод 5 ки-нематически связан с грузовым винтом 4 и состоит из вакуумногр ввода 28 вращения, конической зубчатой передачи 29, храповогб механизма 30 и моментной зубчатой муфты 31. Храповой механизм 30 предназначен для блокировки положения держателя груза в первоначальный момент времени, когда он переведен на одну из рабочих позиций. Храповьш механизм состоит из электромагнита 32, собачки 33, храпового колеса 34, пружины растяжения 35 и плоской пружины 36. На храповом колесе 34 крепится полумуфта 37, соединенная с моментной
зубчатой полумуфтой 31 через полумуфту 38.
Моментная муфта 31 предназначена для
И1сключения поломки механизма при перегрузках и обеспечения необходимого усилия прижима объекта, закрепленного в держателе, в нижнем опущенном его положении. Moмeнт aя муфта 31 состоит из вала- 30, на котором на шпонке установлена подпружиненная пружиной 40 зубчатая полумуфта 41. Другая зубчатая полумуфта 42 креS пится к валу 43, который может соединяться через муфту с электродвигателем и редуктором (на чертеже не показаны) - при автоматическом управлении механизмом, или к нему крепится рукоятка 44 (как показано на чертеже) - при ручном управлении механизмом.
Винтовой механизм работает следующим образом.
При вращении рукоятки 44 по часовой стрелке через коническую передачу 29 и ва куумный ввод В1защения 28 передается .на грузовой винт 4, который при этом начинает вращаться против часовой стрелки, если смотреть на него сверху. Держатель- груза 2, находящийся в исходном нижнем по ложений в пазу трубы 1 на одной из позиций, из-за применения в винтовой паре резьбы левого направления начинает перемещаться вверх до тех пор, пока боковой выступ на его корпусе це выйдет из паза.
При дальнейшем повороте рукоятки 44 выдвижная труба с грузовой гайкой 3 из-за наличия трения в винтовой паре, обеспечиваемой пружиной 20, поджатой с помощью
резьбовой втулки 21, начинает поворачиваться и торец бокового выступа на держателе объекта наезжает на скошенную грань кулачка 7 и перемещает его вниз. Поворот держателя объекта происходит до тех пор, пока выступ на его поверхности не упрется на стенку соседнего паза и пока кулачок 7 под действием пружины кручения-8 не переместится в исходное положение вверх. Одновременно фиксатор 12 контактной группы заходит в продольный паз 13 выдвижной трубы с грузовой гайкой и включает электромагнит 32 храпового механизма и сигнальную лампу (на чертеже не показана). Собачка 33 вступает в зацепление с храповым колесом 34 и вращение грузового винта 4 прекращается, так как -происходит пробуксовка моментной аубчатой муфты 31.
При вращении рукоятки 44 против часовой стрелки храповое колесо, сцепленное с собачкой 33, не препятствует вращению конической зубчатой передачи 29 и грузовой винт 4 вращается в обратную сторону, а выдвижная труба 3 с грузовой гайкой вместе с грузом, закрепленным в держателе, перемещается вниз; происходит пробуксовка мoмeнтнoй зубчатой муфты 31.
При подъеме держателя 2 груза снова в верхнее положение электромагнит 32 от:ключается и включается только тогда, когда начин.ает происходить поворот держателя груза из одной позиции в другую. Последовательный поворот держателя 2 груза на все имеющиеся позиции и опускание и подъем его в этих позициях можно производить .до тех пор, пока боковая поверхность на его выступе не упрется на стенку промежутка между, пазами, имеющую на наружной трубе наибольщую высоту, на котором отсутствует кулачок 7.
Для повторного последовательного перемещения держателя груза снова на все имеющиеся позиции и опускания и подъема его в этих позициях он вращением рукоятки 44 против, часовой стрелки возвращается в исходное первоначальное положение и процесс перемещения повторяется.
Такое исполнение предложенного механизма обладает следующими преимуществами: во-первых, упрощается ручное управление сложным перемещением объекта, так как перемещение его из одной позиции в другую и опускание и подъем его на каждой позиции обеспечивается отодного привода
при простом вращательном движении -: в левую или в правую сторону; во-вторых, упрощается процесс автоматизированного у 1равления перемещением, так как оно может производиться по заданной программе от простых электрических сигналов; в-третьих, упрощается конструкция и повышается надежность работы механизма, так как винтовой механ11зм, как показал опыт работы, прост в изготовлении и надежен в работе.
5
Формула изобретения
Винтовой механизм, содержащий вращающийся от привода грузовой , выдвижную трубу с грузовой гайкой и с закрепленным на ней фиксирующим устройством, наружную трубу с продольным пазом под шпонку, закрепленную на грузовой гайке, отличающийся тем, что, с целью обеспечения перемещения груза по заданному ра5диусу окружности и одновременного его подъема или опускания на заданный уровень, фш сирующее устройство снабжено держателем груза, закрепленным на выдвижной трубе, а на наружной трубе выполнены сквозВ ные продольные пазы под щпонку. расположенные с разными щагами, а между ними закреплены подпружиненные снизу кулачки со скощенной торцовой гранью, при этом начало скоса грани на каждом кулачке совпадает с торцовой поверхностью наружной
S трубы между пазами и на верхней части нарун ной трубы выполнена цилиндрическая выточка с установленными в ней цилиндрической и резьбовой втулкой. Источники информации, принятые во вни8 мание при экспертизе
1.Артоболевский И. И. Ме -анизмы в современной технике, том. 11, М., 1971, рис. 2279, с. 989.
2.Авторское свидетельство ССС. Р № 421618, кл. В 66 F /06, 1971. .т 1 J1- . f . J t 4 j ч 1 Tt „ , «


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для обработки заготовок изоляторов | 1988 |
|
SU1645155A1 |
| Устройство для перемещения диапроектора телевизионной испытательной установки | 1985 |
|
SU1385116A1 |
| ВИНТОВОЙ ДОМКРАТ С РУЧНЫМ ПРИВОДОМ | 1970 |
|
SU260143A1 |
| Консольный кран | 1977 |
|
SU737346A1 |
| Автомат для навивки капиллярных труб | 1989 |
|
SU1673241A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗ КОНСТАНТАНОВОЙ ПРОВОЛОКИ СКОБОК И ВСТАВКИ ИХ В АСБЕСТОВЫЕ КОРОБКИ ТЕРМОБЛОКОВ | 1956 |
|
SU108681A1 |
| Прецизионная регулируемая опора | 1991 |
|
SU1799906A1 |
| СТАНОК ДЛЯ ОБТОЧКИ КОЛЕСНЫХ ПАР БЕЗ ВЫКАТКИ ДЛЯ ВОССТАНОВЛЕНИЯ ПРОФИЛЯ БАНДАЖА ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕС | 1996 |
|
RU2107586C1 |
| ПОДЪЕМНИК | 1985 |
|
SU1354595A1 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД ПЛАШЕЧНОГО ПРЕВЕНТОРА-2 | 1993 |
|
RU2097527C1 |