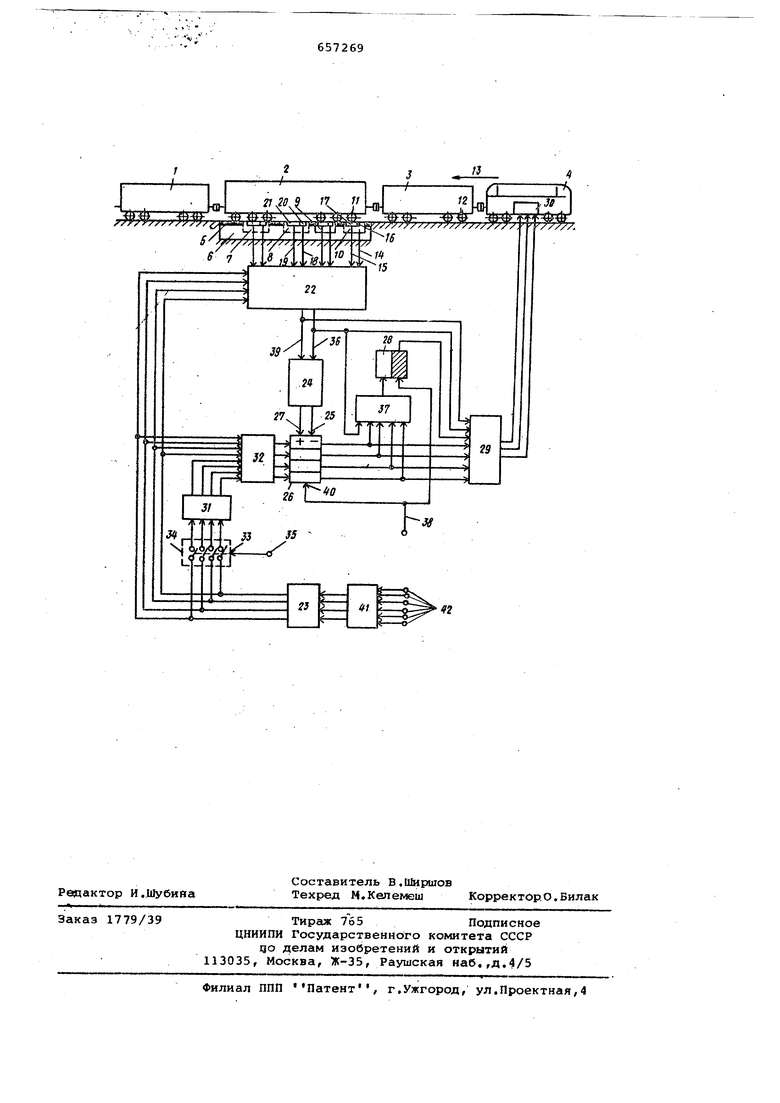
Изобретение относится к обласЭи весоизмерительной техники. Известны устройства для определения положения вагона на платформе весов, содержащие датчики положения осей вагона и логическую схему сигнализации , Ближайшим по своей технической сущности к предлагаемому изобретению является устройство, содержащее датчики положения осей вагона, регистры типа вагонов и привод маневрового ме ханизма 3 . Однако такое устро ство отличается недостаточными эксплуатационной надежностью и стабильностью в работе проявляющимися в том, что как при случайной остановке вагона в процессе подачи на платформу весов, так и при переезде вагоном требуемой зоны установки устройство теряет функции автоматического управления и для око чательной установки вагона требуется визуальная оценка его положения и ручное управление маневровым устройством, в связи с чем увеличивается время простоя вагонов на взвешивающи пунктах. Цель изобретения - повышение наде ности устройства. Цель достигается тем, что предлагаемое устройство снабжено блоком определения положения вагона относительно зоны установки, входы которого подключены к датчикам положения осей вагона и регистрам типа вагонов, а выход соединен с приводом маневрового устройства. На чертеже дана блок-схема предлагаемого устройства. Группа сцепленных железнодорожных вагонов 1-3, соединенная с маневровым механизмом 4, показана в момент окончания установки вагона 2 на платформе 5 весов 6. Железнодорожный путь вдоль длины платформы 5 снабжен группами датчиков 7-10 положения осей, размещенных в требуемых зонах установки вагонов различных типов в соответствии с условиями взвешивания. Например, группа датчиков 10 установлена в требуемой зоне установки оси 11 вагона 2, группа датчиков 8 оси 12 вагона 3 и т.д. вдоль направления 13. Каждая группа датчиков 7-10 снабдсена выходом 14 предварительной и выходом 15 точной установки, соответствующими однозначно расположенным относительно направления 13 передвижки зонам предварительной и точной установки, причем последняя совмещена с требуемой зоной установки, например, в группе датчиков 10 - соответственно выходы зоны 16 предварительной установки и зоны 17 точной установки. Аналогично для группы датчиков 8 - соответственно выходы 18,19 зоны 20предварительной установки и зоны 21точной уста Говки. Выходы каждой группы датчиков 7 - 10 подключены ко входам коммутатора 22. Управляющие входы коммутатора 22 подключены к выходам разрядов регист ра 23 трпа последующего вагона, а вы ходы коммутатора 22 ко входам опреде лителя 24 Направления передвижки, вы ход которбго, соответствующий переме щению оси вагона в направлении 13, подключен, например, к вычитающему входу 25 реверсивного счетчика 26, а выход, соответствующий направлению передвижки, противоположному направлению 13 - к суммирующему входу 27. Выходы разрядов реверсивного счет чика 26 совместно с выходами коммутатора 22 и триггера 28 этапов передвижки подключены ко входным шинам дешифратора 29 команд, выход которого соединен с приводом 30 маневрового механизма 4. Входы записи начального кода счет чика 26 соединены с выходами разрядо регистра 23 типа последующего вагона и регистра 31 типа установленного ва гона через преобразователь 32 кода. Управляющий вход 33 перезаписи типа вагона переключателя 34, связывающего выходы регистра 23 со входами регистра 31, соединен с цепью 35 готовности к очередной передвижке. Одновременно выходы разрядов реве сивного счетчика 26 совместно с выходом 36 коммутатора 22, соответству щим выходу предварительной установки одной из подключенной коммутаторо групп датчиков 7-10, соединены со Входами логической схемы 37 совпадения, выход которой совместно с цепью 38пуска передвижЙ подключен к установочным входам триггера 28 (выход 39коммутатора 22 соответствует точной установке подключенной группы датчиков). Цепь 38 связана также с входом 40 разрешения записи начального кода в счетчик 26. Кроме того, входы разрядов регист ра 23 типа последующего вагона подкл чены через ишфратор 41 к цепям 42 вв да типа вагона. Коммутатор 22, определитель 24, реверсивный счетчик 26, регистр 31, Преобразователь 32, триг гер 28, схема 37 и дешифратор 29 образуют блок определения положения ва гона относительно зоны установки. Устройство работает следующим образом. После окончания операций с установленным в требуемой зоне на платформе 5 весов 6 вагоном 2 на управляющий вход 33 перезаписи типа вагона переключателя 34 по цепи 35 готовности к очередной передвижке подается команда, благодаря чему код вагона 2, хранящийся в регистре 23, перезаписывается в регистр 31 типа установленного вагона (команда в цепи 35 может быть синхронизирована, например, с моментом окончания взвешивания установленного на весах вагона или же с окончанием регистрации весовой информации) . Далее с помощью оператора или автоматически производится ввод по одной из ветвей цепи 42 типа последующего вагона 3,. предназначенного к установке на платформе 5 весов. При этом шифратор 41 формирует код, соответствующий типу вагона 3, который записывается в регистре 23 типа последующего вагона. Указанньтй код, воздействуя на управляющие входы коммутатора 22, подключает к выходу коммутатора выходы группы датчиков 7-10, соответствующей требуемой зоне уста- новки оси 12 вагона 3, например,группу датчиков 8. Код типа последующего вагона 3, записанный в регистре 23, и код типа установленного вагона 2, хранящийся в регистре 31, преобразуются преобразователем 32 в код, соответствующий числу осей вагонов между зоной 21 точной установки вагона 3 и осью 12 установки вагона 3 в зону 21. При подаче по цепи 38 команды на пуск- передвижки, которая воздействует на вход 40 разрешения записи реверсивного счетчика 26, сформированный преобразователем 32 код числа осей передвижки (в рассматриваемом случае это код десятичного числа записывается в разряды счетчиков 26, Одновременно триггер 28 этапов передвижки цепьй 38 устанавливается в положение, соответствующее первому этапу установки вагона 3. При этом дешифратор 29 команд под воздействием выходов счетчика 26, коммутатора 22 и триггера 28 вйрабатывает команду Вперед первого этапа установки (например, Быстрая подача вперед ). Воздействие управляющей команды Вперед на привод 30 маневрового механизма 4 приводит к передвижению вагона 3 в направлении 13 и пйследовательному пересечению осями вагона 2, а затем и вагона 3 зоны 21 точной установки группы датчиков 8, подключенной коммутатором 22. Подключенный к выходу коммутатора 22 определитель 24 направления передвижки при каждом пересечении осями вагонов зоны 21 формирует счетный импульс, поступающий на вычитающий вход о 25счетчика 25, в результате чего по мере перемещения вагона 3 в направле нии платформы 5 весов б уменьшается содержимое счетчика 26. При достижении содержимым счетчик 26нулевого значения, что соответств ет переезду через зону 21 точной установки шести осей вагонов с начал а пуска передвижки, и входу оси 12 установки вагона 3 в зону 20 предварительной установки, логическая схема 37 под воздействием кода, записанного в счетчике 26 (код десятичного числа О) и наличия сигнала на вы ходе 36 коммутатора 22, переводит триггер во второе устойчивое состояние, соответствующее второму этапу установки. При этом дешифратор-29 вырабатыва ет команду Вперед второго этапа установки (например, Медленная подача вперед ). При последующем вхождении оси 12 вагона 3 в требуемую зону 21 установ ки появляется сигнал на выходе 39 коммутатора 22, что приводит к появлению на выходе деглифратора 29 коман ды Стоп, при этом группа сцеплен ньих вагонов тормозится, Если в процессе торможения ось12 установки вагона 3 останавливается в пределах требуемой зоны 21, процес установки вагона 3 на этом заканчивается и затем производятся необходи мые технологические операции (например, взвешивание, догрузка и т.д.). Если в процессе торможения ось 12 выходит из зоны 21, то благодаря пос туплению от определителя 24 вычитающего импульса содержимое счетчика 26 изменяется и соответствует десятичному числу , при этом дешифратор 29 вырабатывает команду Назад а маневровый механизм 4 начинает перемещать группу вагонов в направлени противоположном направлению 13 передвижки. При повторном вхождении оси 12 в .зону 21 определитель 24 выработает импульс, который, поступая на суммирующий вход 27 счетчика 26, снова делает содержимое счетчика, равным нулевому значению, что приводит к 69 подаче на привод 30 команды Стоп т.д. В результате произведенных маневров вагон 3 осью 12 устанавливается в требуемой зоне 21 на платформе весов . При окончании операций с вагоном 3 при поступлении по цепи 35 команды о готовности к очередной передвижке код вагона 3, хранящийся в регистре 23, переносится в регистр 31, и устройство готово к автоматизированной установке очередного вагона. Таким образом, в предложенном устройстве текущее положение устанавливаемого вагона чотносительно требуемой зоны установки постоянно фиксируется в виде сочетания вьгходного кода реверсивного счетчика с состоянием выходов подключенной группы датчиков, благодаря чему функционирова-, ние устройства не нарушается при различных эксплуатационных возмещениях, как то: изменение скорости подачи вагонов , включая останов; увеличение тормозного пути и т.д.. Тем самым повышается эксплуатационная надежность устройства и стабильность работы. Формула изобретения Устройство для определения положения вагона на платформе весов и управления маневровым механизмом, содержсоцее датчики положения осей вагона, регистры типа вагонов и привод маневрового механизма, отличающееся тем, что, с целью повышения надежности устройства, оно снабжено блоком определения положения вагона относительно зоны установки, входы которого подключены к датчикам положения осей вагона и регистрам типа вагонов, а выход соединен с приводом маневрового механизма. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство i 59839,. кл.С 01 G 19/04, 1938. 2.Авторское свидетельство №106174, кл.С 01 G 19/04, 1956. 3.Патент США W3512004, кл.250-223, 1970.
«
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| Устройство весового контроля движущегося состава | 1979 |
|
SU879318A1 |
| Устройство для управления погрузкой сыпучих материалов из бункеров в движущийся состав | 1977 |
|
SU691371A1 |
| Устройство для автоматического контроля погрузки транспортных средств | 1978 |
|
SU880929A1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ ДЛЯ ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 2009 |
|
RU2417914C1 |
| Устройство для коммутации сообщений | 1984 |
|
SU1247879A1 |
| Устройство для испытаний датчиков давления | 1983 |
|
SU1129624A1 |
| Устройство для динамического взвешивания | 1983 |
|
SU1137330A1 |
| Устройство для моделирования случайных процессов | 1984 |
|
SU1223227A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |