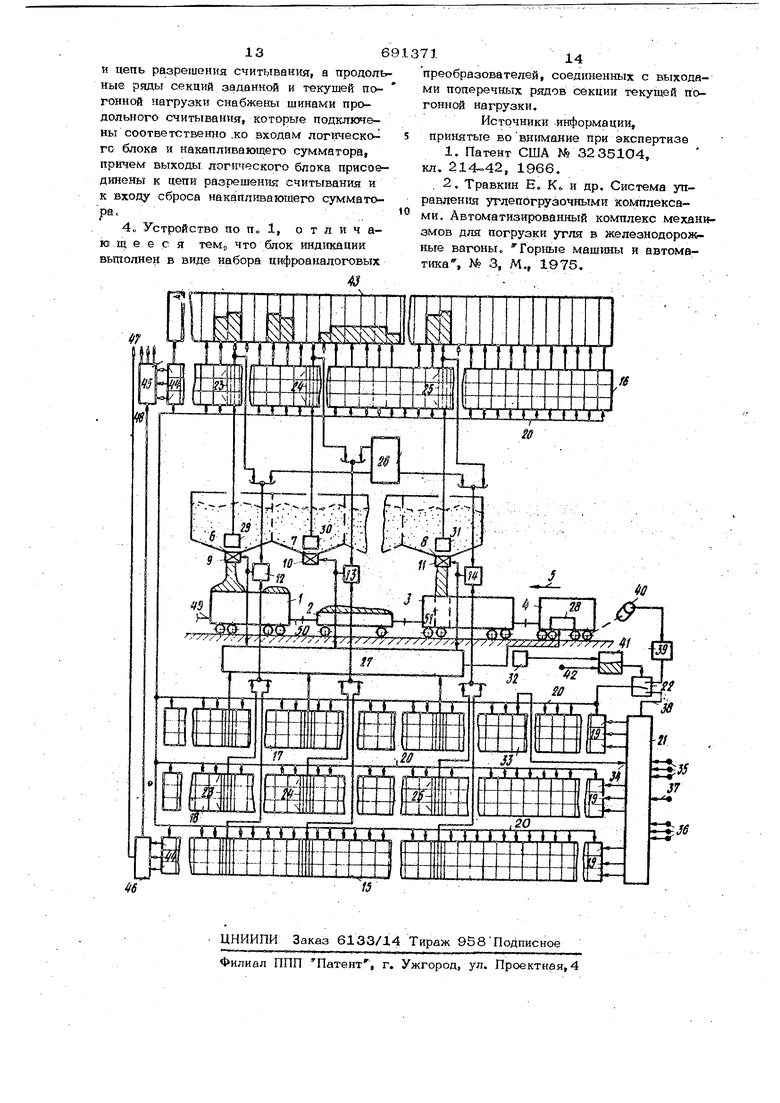
6 И ссхзтояшей из секций заданных погонных нагрузок, фракций и типов вагонов, снабженных шинами последовательного ввода информации, а также секции текущих поэгонных нагрузок, поперечные ряды элементов памяти соединёнь по схеме накопления импульсов, импуяьсньтми датчиками производительности вьтуск ных отверстий бункеров, блоком констант бункеров, триггером, установочнь1е входы которого подклинены к цепи запуска 1нда чику положения вагонов, переключателем, цепь управления которого подклк чена к вьтходу триггер1з, датчиком переме щения состава и с&язанным с ним формирователем импульсов, цепями ввода фракций и установки исходного положения, подключенными ко входам блока йаданкя программ, причем датчик положе ния вагона установлен впереди выпускных отверстий по направлению подачи сос тава, блок задания программ связан непосредственно с шинами последовательного ввода информации и совместно с вьг ходом формирователя путевых импул1:«ов через переключатель - с шинами сдвига информации по продольным рядам элемен-тов памяти цифровой модели, а также с выходами поперечного ряда элементов памяти в секции типов вагонов, соответствующего месту установки датчика поло жения вагонов, выходы поперечных рядов элементов памяти, соответствующих расположению выпускных отверстий бункеров, в секциях фракций, заданной в текущей погонной нагрузки подключены сов местно с выходами &ока констант бункеров ко входам блоков управления приводами затворов вьшускных отверстий бункеров, в секции типа ваго.нов совмест но с выходами блоков управления привоЙамй 5atBopQ5 выпускных отверстий бункеров - ко входам задатчика скорости состава, а счетные входы поперечных рядов в секции текущих погонных нагруЭок прдклкэ ень к соответствующим ймпуйьйньЛм датчикам производительности в пуекнШ бтвёрс тий Кроме того, зад атчйк скорости состав может быть выполнен в виде селектора Мйнимйльного значения скорости из предел ьйо допустимых скоростей для загружаемых типов вагонов, и устройство может дополнительно содержать накапливающий сумматор, логический блок и цепь разрешения считывания, а продольные ряды секций заданной и текущей погонной нагрузки снабжены шинами продольного 14 считывания,-которые подключены соответственно ко входам логического блока и накапливающего сумматора, причем выходы логического блока присоединены к цепи разрешения считывания и .к входу сброса накапливающего сумматора, а блок индикации целесообразно выполнить в вн де набора цифроаналоговых преобразователей, соединенных с выходами поперечных р$щов секции текущей погонной нагрузки. Изобретение иллюстрируется чертежом, на котором представлена функциональная схема устройства.. Состав, состоящий из сцепленных вагонов 1, 2, 3 различных, TifflOB и маневрового механизма 4, изображен в момент его перемещения в направлении стрелки 5 подачи под бункера, хранящие сыпучий материал нескольких фракциЙ5 и одновременной за грузки вагонов 1 и 3. Выпускные отверстия 6, 7, 8 бункеров оборудованы приводами 9, 10 11 их затворов, которые соединены с выходами блоков 12, 13 и 14 управления приводами затворов, вьшолненных на элементах сравнения. ;;;.: . :... Перемещение состава относительно вьтускных отверстий бункеров имитиpyeт сяпри помощи цифровой динамической модели состава, состоящей из секции 15 заданной погонной нагрузки, сбкцик 1б текущей погонной нагрузки, секции 17 типов вагонов и секции 18 фракций их загрузки. . , Каждая секция иифровой модели представляет собой дв5 мерную матрицу из продольных и поперечных рядов одинак(вых ивзаимосвйзанных элементов памяти, например триггеров, феррит-транзисторных ячеек и т.н. Продольные рядь элементов памяти секций цифровой модели образуют регистры сдвига, У которых Щины 19 последовательноговйода информации и шины 20 сдвига информации подключены соответственно к выходам блока 21 задания программ и выходу переключателя 22, причем у секции 1Q текущих погонных нагрузок шины последовательного ввода информации отсутствуют, а взаимосвязь элементов памяти каждого поперечного ряда образует схему накопления импульсов, например суммирующего счетчика. На чертеже заштрихованы поперечные ряды 23, 2 4 и 25 элементов памяти, отображающие на цифровой модели состава расположение вьгаускных отверстий 6, 569 7, 8 бункеров (например, поперечный ряд 24 соответствует выпускному отверстию 7 и т. п.), причем входы сравнения каЖгдого блока 12, 13 и 14 управления приводом затвора выпускного отверстия бункера подключены с одной стороны к выходам соответствзгюыего ему поперечного ряда у секций 15 и 18 заданных погонных нагрузок и фракций, а с другой ст« pof&i - к выходам элементов памяти аналогичного поперечного ряда cjeKO 16 текущей погонной нагрузки и вь1ходу блока 26 констант бункеров (последний пред назначен для хранения кодов фражи.йй cbtпучегр материала по вьщускнык отверсти ям бункеров).. ; Выходы же каждогр блока утп равдеН1ая приводом затвора совместно с pbixbaiaxiij элементов памяти указашфгх nonepe4i jx ряиоэ 23, 24, 25 секции J7 типбэ вагонов Пбдкя1рчеиы ко входам зада чизса 27 скорости состава, СЕ1Язанный с приг йодом 28 маневрового механизма 4- . , Кроме того, счетные вхЬдь тех же . поперёчньлх рядов 23, 24 и 25 у секций 16 текущих nproHHbik нагруфок еоедйнещл с выходами имт1удьЬ1а 1хда т 29, 30 31 дроизводительностй соответствукййх вьгаускньгх отверстий 6, 1 ив ёункероё (датчики быть вьтолнены на основе измерителей объемной Щй весовой производительности). . : Датчик 32 положения вагонов состава установлен впереди вьтускных отверстий бункеров по направлению стрелки 5 подачи состава в непосредственной близости о от них, а выход элементов памяти поперечного ряда 33, отображающего на цифровой модели место установки датчика 32, у секции 17 типов вагонов присоедийен к блокировочному входу 34 блока 21 задания программ. Последний соединен с цепями 35 ввода последовательных ТШ1ОВ вагонов в составе, цепями 36 ввода фракций их загруйки, цепью 37 установки исходного положения, а также сШб жен частотным выходом 38, соединенным с одним из коммутируемых входов переключателя 22. Второй коммутируемьй вход переключателя 22 подключен через формирователь 39 путевых импульсов к датчику 40 перемещения состава. Управляющий вход переключателя 22 подключен к выходу триггера 41, уставоч ные входы которого соединень с выщбдом датчика 32 положения вагонов и цепью 42 запуска. 1 Блок 43 индикации выполнен в виде набора аифроаналоговых преобразователей, например, На основе линейных индикаторов напряжения, каждый из которых с выходами элементов памйти поперечных секции 16 текущей погонной нагрузки.. .- .. ..; Секции 15 и 16 заданной и текущей погонной нагрузки снабжены шинами 44 продольного считывания, которые подключены ко входам накапливающего сумматора 45 и логического блока 46, выходы которого подключены к цепй 47 разрещения счйтБшания повагонного веса и к входу 48 сфоса накапливающего сумматора 45. . : Кроме этого, на чертеже цифрами 49 и 50 обозначены продольные промежутки Вагона 1, соответствующие незагружаемым участкам Вагонов между автосцепкой и 1 зовом, и цифра 51 обозначает элементарнуюпр(эд0льную зону вагона 3, нахО дящуюся йод выпускным отверстием 8. ...:.,, ..: .-. /;-;: Устройство работает следующим обра0оМ. / ..: .. . . ,: ..... При подаче состаба под загрузку оператор, вбздёй с на цепь 42 запуска, устанавййвает триггер 41 в одно из устойчивых состоаний и тем самьиц подключает частотой выхЬд 38 ёлока 21 задания программ (череэ переключатель 2l2) к шинам 26 сдвига информации цифровой модели состава и затем вводит в блок 21 задания программ по цепям 35 и 36 последовательность типов вагонов 1, 2, 3 в составе и фракций их загрузки сыпучим м61«рйалом, хранящкмся в бункерах. В блоке 21 задания программ введенная оператором информация о параметрах йоданного под аагру;эку состава щифруется и преобразуется в последовательность серий цифровых кодов и продвигающих иипульсов. Каждая серия цифровых кодов, отражающая характеристики определенного вагона состава, представляется в виде набора кодов: максимально допустимой скорости передвижки, заданных погонных нагрузок по длине вагона и заданной фракции загрузки, которые одновременно поступают соответственно на шины 19 последавательного ввода информации секций 17, 15, 18 цифровой модели и последовательно продвигаются по элементам памяти продольных piamoB В направлении стрелки 5 подачи состава при помощи серии продвнгающ ос импульсов, возлей с твуюиагх на шшгы 2О сдвига информации продоль1гых рядов, при этом количество цифровых кодов в наборе равно количеству продвигаюших импульсов и пропорционально длине-вагона по автосцепкам. После подачи на шины 20 цифровой модели полной серии продв11гающих импул сов, характерных, например, для вагона 1, соответствующий ему набор цифровых кодов запишется в ячейках памяти поперечнда рядов секций 17, 15, 18, причем общее количество поперечных рядов с информацией о вагоне 1 будет отражать его длшу по автрсцепкам, т. е. каждый элемент памяти продольного ряда цифровой модели моделирует условную единицу; длины (элементарную прЬдольную аону вагонов), а каждый попёреч;ный ряд - заданные (или текущие) значения параметров элемёнтврнЬ й продольной зоны вагона, например, погонную нагрузку, скорость пе редвижкии т.д.-- .;, ;..- :/... rijpiti поступлении от блока 21 задания программ последующей серии кодов , .и ИмтгулШов, сопровождающей вагон 2 cocfaBa, ранее записанная в секциях цифровой модели информация о вагоне 1 сДвигйется в направлении стрелки 5 пода чИ на число поперечньгх рядов, соответ ствующих длине вагону 2 по автосцепкам И одйовреМеннр в освободившихся ячейк;ах na jjfiH бёйцйй З апись1ваются цифровые коды, бтраткающие, параметры вагона 2, и т. д. ;.--; ч;-,; ,- ;: . - : Таким o6pa3Oivt дчевидно, что после подач и всех серки цифровых кодов и продвигйющйх импульсов, соответбтвуюших набраннрй опёраторЬм п ослёдовйгёлькости тИпЬр вагонов 1, 2, 3 состава и фракций Hk загрузки сыпучим материалом, параме ры всех вагонов состава, необходимые при ИХ последующей загрузке, будут проМОДёлироЬанЬ последовательностью цифровых кодов, записаннь1х в ячейках памяти секиий цифровой модели, Г . . . . . . .-.-. - - Затем ртгератор воздействует на nenfe 37 устанрвки исходного положения, при помощи которой в блоке 21 задания программ запускается (на частотном выходе 38) дополнительная серия продвигающих импульсов, перемещающая указанную последовательность цифровых кодов в исходное положение, когда ее первый (навстре чу направлению стрелки 5 подачи) цифровой код, имитирующий на цифровой модели автосцепку вагона 1, запищется в элементах памяти поперечного ряда 33, соответствующего на секции 17 расположению датчика 32 положения вагонов, причем выход указанного ряда воздействует на блокировочный вход 34 блока 21 задания программ и отключает подачу. дополнительных продвигающих импульсов. Наэтом процесс ввода информации о параметрах состава в цифровую модель и ее продвижения до исходного COCTOSIния оканчивается. При последующем достижении первой автосцепкой вагона 1 состава датчика 32 полржения. вагонов (при дваженпи срстава в направлении стрелки 5 подачи) триггер 41 переводится во второе устойч1гоое состояние, пр|И котором датчик 40 полржения состава через формирователь 39 путевых импульсов и переключатель 22 подключается к щинам 20 сдвига секций цифрово 5 модели, причем длина пути, проходимого составом на один путевой импульс датчика 40 положения состава срртветствует ранее выбранной Длине элементарной.пррдольной зрны вагона. При этом очевидно, что последующее перемещение состава в направлении стрелн ки 5 подачи и положение продольных 3ipH вагрнрв отНосительнр вьшускных отверстий отображается на секциях 17, 18, 15 цифровой модели соответствующим сдвигом записанной в них последовательности цифровых кодов и положением цифровыхкодов, мрделирующих параметры пррдрльных зон вагонов, огносительнр поперечных рядов 23, 24, 25 секций, имитирующих расположение Вьшускных от верстИй 6, 7, 8 бункеров. Впроцессе перемещения вагонов 1, 2, 3 состава, под бункерами с сыпучим грузом длякаждой продольной зоны вагот на, достигшей Или находящейся под выпускйым отверстием бункера, определяется погрузочная ситуация. С этой целью В блоках 12, 13, 14 управления приводами затворов сравниваются достигшие по- перечных рядов 23, 24, 25 секций 17, 18., 15 коды заданных значений параметров указанных продольных зон с кодами текущих значений тех же параметров на выходах поперечных рядов 23, 24, 25 секций. 16 цифровой модели и блока 26 констант бункеров. Если, например, продольная зона 51 вагона 3 не загружена заданным количеством сыпучего материала, а фракция сыпучего материала в находяпХемся над ней выпускным отверстием 96 8 соответствует заданной, то блок Д.4 управления приводом 11 затвора по результату сравнения кодов заданных и текущих параметров выработает команду управления, воздействие которой на привод 11 затвора приведет к его открытию и загрузке продольной зоны 51 струей сыпучего материала при ее перемещении под вьшускным отверстием 8. При загрузке продольной зоны 51 датчик 31 производительности выпускного отверстия В формирует импульсы, число которых пропорционально весовому или объемному количеству материала, про шедшего через BbiftycKHoe Отверстие бункера. Эти импульсы поступают на счетньй вход поперечного ряда 25 секции 16 текущей погонной нагрузки и накапливают ся в разрядах его пересчетной схемы. Очевидно, что состояние элементов памяти поперечного рада 25 отражает в соответствии с применяемым .кодом количество сыпучего материала, погруженного в продольную зону 51 вагона 3. Если в процессе перемещения и «загрузки продольной зоны 51 под вьшускным отверстием .8 количество сьшучего материала, погруженного в нее, достигй- ет заданного з1й ачёни:я, то благодаря воздействию вьгхода блока 14 управления приводом 11 затвора прекращается посту пление сыпучего Материала из вьптускйого отверстия 8, а в поперечном ряду 25 секции 16 будет зафиксирован код количества фактически погруженного в ttpOrдольную зону 51 сыпучего материала. Так как в блоках 12, 13, 14 ynpiaBления приводами затворов погрузочная ситуация определяется «одновременно шш всех продольных зон вагонов, достигшгос BbmycKHbix отверстий бункеров, то очевидно, что в составе может загружаться одновременно Несколько вагонов различными фракциями сыпучего материадау при этом цифровые коды, накапливйек(Ь1е в по перечных рядах секции 16 цифровой моде ли по мере последовательной загрузки пр дольных зон вагонов состава, продвигаются по направлению 5 подачи синхронно с перемещением состава теми же путевьь ми импульсами, что и коды поперечных . рядов секций 18, 17, 15, т. е. секция 16 моделирует динамику продвижения и действительной загрузки продольных зон вагонов состава. В связи с тем, что при одновременной загрузке нескольких вагонов задаваемые 71 секцией 15 цифровой модели нормы загрузки продольных зон вагонов могут быть различными (в соответствии с их типами), состав перемещается маневровым механизмом 4 с оптимальной скоростью, определяемой комбинацией типов загружаемых вагонов и обеспечивающей максимальную производительность при поГруэке вагонов различных типов. Это достигается тем, что из цифровых кодов, поступающих с поперечных рядов 23, 24, 25 секции 17 цифровой модели и отражающих макси 1альнодопустимые скбро ги пере . движки вагоНо достигших выпускных отверстий 6, 7, 8, задатчик 2 7 скорости состава избирает тог цифровой код, который соответствует минимальному значению вел ич ин утсазанных скороетей для загружаемых в данный момент времени вагонов.: С этой целью чзадатчшс 27 скорости выполнен в виде селектбра цифровых кодов, а его управляющие входы ооеД1йены с выходами блоков 12, 13, 14 управления приводами вьшускНызс отверстий. Для визуального контроля хода процесса погрузки всего состава в целом, выходы элементов памяти каждого поперечного ряда секции 16 текущей погонной нагрузки соединены со входами цифроаналоговых преобразователей, составляющих блок 43 цндикацйи, ; Если каждьй цифроаналоговый преобразователь вьтолнить на основе, например, газоразрядного линейного индикатора напряжения, то текущее значение ма- , терйала в каждой продольной зоне вагона будет отражаться высотой светящегося газа, а набор всех индикаторов будет отображать динамику перемещения и загрузки вагонов состава. ..... - . Если вагон 1 составу перемещается за пределы бункеров в направлении стрелки 5 подачи, то моделирующая его последовательное .ть цифровых кодов в секциях 15 и 16 текущей и заданной погонной нагрузки подается на входы накапливак щего сумматора 45 и логического блока 46 через Ш1шы 44 продольного считьгвания инфории-ации в указанных секциях цифровой модели. При этом логический блок 46 под воздействием цифровых кодов, соответствующих первому промеяд тку 49 вагона 1, вырабатывает вьЬсодной сигнал, поступающий на вход 48 сброса накаш111вающего сумматора 45, и устанавливает его в нулевое состояние. При посгуплснни всех цифровых кодов, несущих информацт ю о загрузке продольных зри кузова вагона 1, сигналы на выходах логического блока 46 отсутствуют, а в накапливающем сумматоре 45 отража ется результат суммирования показателей по каждой продольной зоне, т. е.количес во материала, погруженное в вагон 1. Разрешение на считывание накопленной в сумматоре 45 информации о количест ве материала в вагоне 1 поступает в цепи 47 разрешения считывания с вьтхода логической схемы 46 при последующей по даче на ее аход цифровых кодов, отражающ второй промежуток 50 вагона 1. Перемещение вагона 2 за пределы выпускных отверстий бункеров также сопровождается описанным выше процессом определения количества сыпучего материала, погруженного в вагон и т. д.Таким образом, устройство бла1 одаря применению цифровой динамической модели движущегося состава в сочетании суже известными и вновь вводимыми элементами позволяет расширить функциональные И эксплуатационные показатели подобных известных решений, а именно: организовать нормированную загрузку на ходу состава из разнотипных вагонов несколькими фракциями сыпучего матерттала, повысить производительность процесса погрузки и, кроме того, визуально контролировать ход процесса погрузки состава и фиксировать количество сьшучего материала, погруженного в каждый вагон. Формула изобретения 1. Устр 5Йство для управления погрузкой сыпучих материалов из бункеров в движущийся состав, содержащее блок зада нии программ, подключенный к цепям вво да тИйа вагонов, зйдйтчйк скороетИ соста на, связанный ,с приводом маневробогЬ механизма, блоки управления приводами затворов вьшускных отверстий бункеров, блок индикации, датчик положения вахюнов и цепь запус1са, отличающеес тем, что, с целью повышения производительности при загрузке разнотипных ваго нов различными фракциями сыпучего материала, оно снабжено цифровой динами, ческой моделью состава, образованной прОДблЬными и поперечными рядами взаимоСвязанных элементовпамяти с щинаМИ сдвига информации по продольным рядам и состоящей из секций заданных погонтсых нагрузок, фракций и типов вагонов, снабжённых шинами последовательного ввода информации, а также секции текущих погонных нагрузок, поперечные ряды элементов памяти кртчэрой соедине- ны по схеме накопления импульсов, импульсными датчиками производительности выпускных отверстий бункеров, блоком констант бункеров, триггером, установочные входы которого подключены к цепи запускй и датчику положения вагонов, переключателем, иепь управления которого подключена к выходу триггера, датчиком перемещения состава и связанным с ним формирователем путевых импульсов, цепями ввода фракций и установки исходного положения, подключенными ко входам блока задания программ, причем датчик положения вагона установлен впереди ьыпускных отверстий по направлению подачи состава, блок оадайия программ связан непосредственно с шинами йоследовательного ввода информации и совместно с вь ходом формирователя путевых импульсов через переключатель с шинами сдвига информации по продольным радам элементов памяти цифровой модели, а также с выходами поперечного ряда элементов памяти тг секции типов вагонов, соответ- . ствующего месту установки датчика положения вагонов, выходы поперечных рядов элементов памяти, соответствующих располОжению выпускных отверстий бункеров, в секци51х фракций, заданной и текущей погонной нагрузки подключены совместно с выходами блока констант бункеров ко входам бло1сов управления приводами затворов выпускных отверстий бункеров, в секции типа ватч)нов совместно с вьпсодами блоков управления приводами затворов BbmycKHbix ofвepcтий бункеров - ко входам задатчика скорости состава, а счетные входы поперечных рядов в секции текущих погонных нагрузок подключены к соответствующим импульсным датчикам производительностивыпускных отверстий. 2, Устройство по п. 1, о т л и ч аю щ е е с и тем, что задатчик скорости состава вьтолнеи б виде селектора минимального значения скорости из предельно допустимых скоростей для загружаемых типов вагонов. 3. Устройство по п . 1, о т л и ч аЮ щ е е с я тем, чт;о оно содержит накапливающий .сумматор, логический блок
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля погрузки транспортных средств | 1978 |
|
SU880929A1 |
| Микропроцессорное устройство управления горизонтальным затвором с электромеханическим приводом для загрузки железнодорожных вагонов | 1991 |
|
SU1837042A1 |
| Устройство для управления загрузкой сыпучего материала в железнодорожные полувагоны | 1976 |
|
SU673570A1 |
| Способ автоматической дозированной погрузки сыпучих материалов в движущиеся железнодорожные вагоны | 1985 |
|
SU1291517A1 |
| Устройство управления вибрационным питателем для загрузки железнодорожных вагонов | 1989 |
|
SU1791288A1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УБОРКИ ЗЕРНА КОМБАЙНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462019C1 |
| Устройство автоматического управления установкой для загрузки дозированными порциями сыпучего груза в транспортные средства | 1989 |
|
SU1765089A1 |
| Устройство для дифференцированного учета материала,перемещаемого конвейерной линией | 1971 |
|
SU450208A1 |
| Цифровое устройство управления весовым дозированием | 1983 |
|
SU1177680A1 |
