местами погрузкя, датчиками положения приводов управления грузопотоками, дополнительными определителями по- рядковых номеров загружаемых трансгюртных средств и дополнительными весоизмерительными блоками,а по числу транспортных средств в транспортной це пи дополнительными вычитающими блоками контроля степени загрузки и блоками индикации, цепями разрешения записи начального кода, группами цепей разрешения включения грузопотоков по числу мест погрузки в каждо группе и группами индикаторов грузопотоков по числу мест погрузки в каждой группе, причем однииз выходов датчиков положения загружаемых транспортных средств, выходы весоизмерительных блоков, определителей порядкового номера загружаемого транспортного средства и датчиков положения приводов управления грузопотоками соединены со входами коммутатора, который выполнен многоканальным другие выходы датчиков положения загружаемых транспортных средств соединены со входами соответствующих определителей порядкового номера транспортных средств, выходаи многоканального коммутатора соединены с цепями разрешения включения, грузопотоков, со входами индикаторов грузоцотоков и через соответствующие сумматоры - с одними из входов вычитающих блоков контроля степени загрузки, к другим входам которых подключены цепи разрешения записи начального кода.
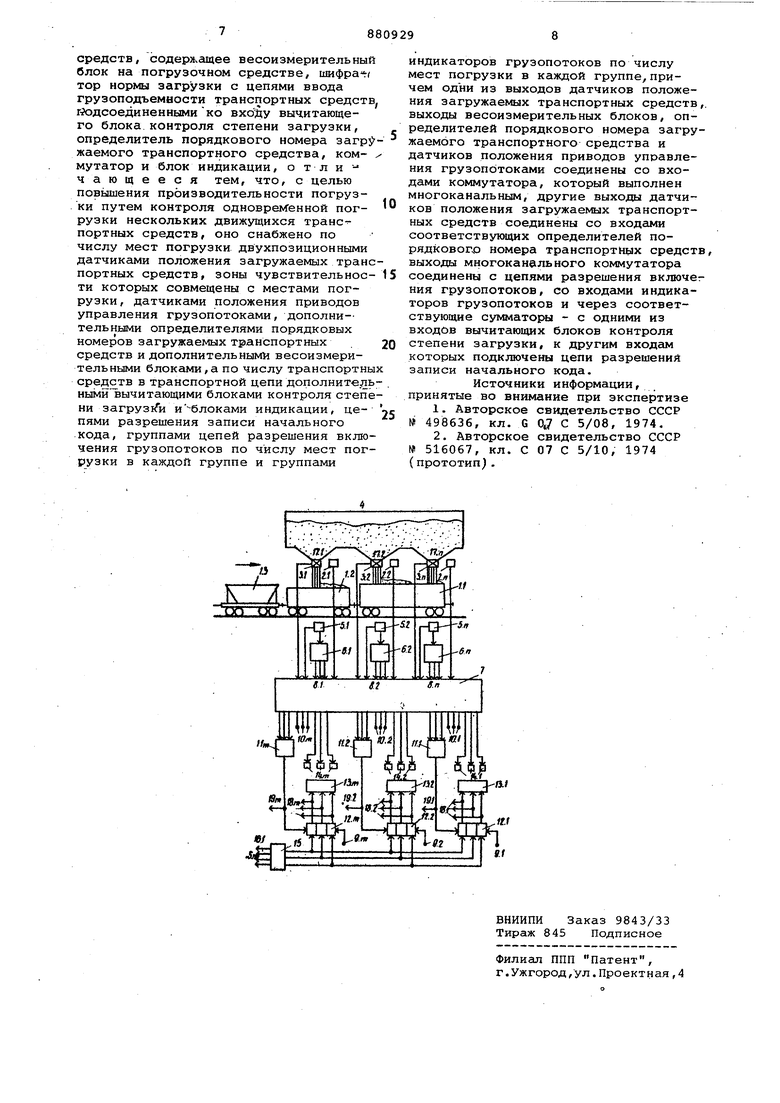
На чертеже изображена функциональная схема устройства.
Устройство для автоматического контроля погрузки транспортных средств 1.1... 1.П содержит весоизмерительные блоки 2.1...2.П, установленные на каждом месте погрузки у выпускных отверстий 3 .1...3.п бункера 4,.акустические, фотоэлектронные или другие датчики 5 .1. .. 5 . п положения транспортных средств,зоны чувствительности которых совмещены с г естами погрузки,определители 6.1. .. 6 Порядкового номера загружаемого транспортного средства (вагона под соответствующим отверстием, многоканальный коммутатор 7 с управляющим входами 8.1...8.п, цепи 9.1...9.m разрешения записи начального кода, группы цепей 10.1...10.т разрешения включения грузопотоков по числу мест погрузки в каждой группе, сумматоры 11.1.. . 11.m, вычитающие блоки 12.1...12.т контроля степени загрузки с блоками 13.1...13.т визуальной индикации, группы индикаторов 14.1...14.т по числу мест погрузки в каждой группе, ишфратор 15 нормы загрузки с цепями 16.1...16.т ввода грузоподъемности транспортных средст 1.1...1.П и датчики 17.1...17.П положения приводов управления грузопотоками. При этом количество весоизмерительных блоков 2.1...2.П, датчиков 5.1...5.П и 17.1...17.П, а также определителей б. 1.. . 6 . п порядкового номера транспортного средства, находящегося под погрузкой, соответствует коли.честву мест погрузки, а количество сумматоров 11.1,..11.т, вычитающих блоков 12.1...12.т контроля степени загрузки с блоками индикации 13.1...13.т, индика;торов 14.1...14.т грузопотоков, цепей 10.1...10.т и 9.1...9.т соответствует максимально возможному количеству транспортных средств в транспортной.цепи. Датчики 17.1...17.П положения приводов управления грузопотоками представляют собой, в частности, двухпозиционные релейные датчики , характеризующие состояние затворов выпускных отверстий (Открыто Закрыто } , и связаны со входами многоканального коммутатора 7, с другими входами которого связаны выходы импульсных весоизмерительных блоков 2.1...2.П, выходы датчиков. 5.1...5.П положения загружаемых транспортных средств и выходы определителей б.1... б. п порядковых номеров загружаемых транспортных средств, которые могут быть выполнены на основе реверсивных счетчиков импульсов , счётные входы которых подк;почены ко вторым выходам датчиков 5.1. ..5 . п . Выходы многоканального коммутатора образуют ряд групп по масимально возможному числу транспортных средств в транспортной цепи. Группы выходов соединены со входами вычитающих 12....2.m блоков контроля степени за.грузки через соответствующие сумматоры 11.1. . .11.т, со входами индикаторов 14.1...14.т грузопотоков и подключены к цепям 10 .1. .. 10 . m разр.ешения включения грузопотоков. Ко входам вычитающих блоков12.1...12.т подключены цепи ,9.1.. .9.m разрешения записи начального кода И шифратор 15 загрузки, к которому в свою очередь подключены цепи 1б.1...1б.т ввода грузоподъемности транспортных средств. Для автоматизации дозированной пйгруки вагонов устройство может быть снажено цепями 18.1...18.т контроля недогруза, которые подключены к выходам вычитающих блоков 12.1...12.т, и цепями 19.1...19.т контроля производительности загрузки, которые подключены к выходам сумматоров 11.1.;. 11.т.
Устройство работает следующим образом.
Перед подачей транспортных средст (вагонов) 1.1... 1.П состава непосредственно на погрузку под погрузочный бункер 4 с выпускными отверстиями 3.1...3. п с помощью оператора или
автоматически производится ввод величины грузоподъемности транспортных средств по цепям 16.1...16.m и выдача разрешения записи этих величин в вычитающие блоки (счетчики 12.1...12.П1 в соответствии с порядKOBtJMH номерами транспортных средств в транспортной цепи по цепям 9.1... 9.т. При этом шифратор 15 запишет в .вычитающие блоки (счетчики) 12.1... 12.m коды технических норм загрузок транспортных средств так,что в вычитающем блоке 12.1 отражается норма загрузки первого транспортного средства 1.1 (считая против направления подачи состава), в блоке 12.2 - второго транспортного средства 1.2 и т.д. В процессе подачи состава на пункты погрузки при достижении каждым вагоном зоны чувствительности датчиков 5.1. .. 5. п последние формируют импульсы, которые поступают в соответСтвующие определители б . 1. ..6.п порядковых номеров загружаемых транспортных средств, причем каждый из них сформирует выходной код, соответствующий порядковому номеру вагона в составе, находящегося в данный момент под соответствующим выпускным отверстием. Например, если первый вагон состава находится под выпускны отверстием 3.1, то блок 6.1 сформиру ет код, соответствующий первому по-, рядковому номеру вагона состава. Воздействие указанного кода на управляющий вход 8.1 коммутатора 7 приводит к тому,что потенциал с выхода датчи ка 5.1 поступает на одну из цепей 10.1, т.е. в данной цепи сформируется разрешение на открытие затвора выпускного отверстия 3.1. При открытии затвора выпускного отверстия 3.1 сыпучий груз поступает в первый вагон, причем выход импульсного весоизмерительного блока 2.1 через коммутатор 7 подключается к одному из входов сумматора 11.1. Одновременно аналогичным образом выход датчика 17.1 положения привода выпускного отверстия 3 .1 возбуждает один из группы индикаторов 14.1,представляя оператору информацию о том, что груз поступает из выпускного отверстия 3.1 в первый вагон состава. Через сумматор 11.1 весовые импульсы, число которых отражает количество груза, прошедшего через выпускное отверстие 3.1 в первый вагон, поступают на вычитающий вход блока 12.1, соответст вующего первому вагону состава. Таким образом, по мере загрузки первого вагона величина блока 12.1, соответствующая грузоподъемности этого вагона, уменьшается и соответствует величине его недогруза до его технической нормы. Величина недогруза вагона поступает одновременно на вход блока 13.1 цифровой индикации, .а также к цепям 18.1 контроля недогруза, которые могут быть использованы для автоматизации дозированной погрузки. Если в процессе дальнейшего движения вагон поступает под выпускное отверстие 3.2, то датчик 5.2 и определитель 6.2 на управляющий вход 8.2 коммутатора 7 выдают соответствующий первому вагону состава. Аналогичным образом в другой цепи из группы 10.1 появляется разрешение на открытие затвора выпускного отверстия 3.2, и сыпучий груз поступает в первый вагон через выпускное отверстие 3.2. При этом весоизмерительный блок 2.2 подключается через коммутатор 7 к одному из входов сумматора 11.1. При одновременной загрузке первого вагона из выпускных отверстий 3.1 и 3.2 частотный сумматор 11.1 суммирует импульсы поступающие с измерительных блоков 2,2 и 2,1 так, что в цепи 19.1 контроля текущей производительности загрузки может быть измерена сутимарная производительность загрузки первого вагона, а в вычитающем блоке 12.1 по прежнему отражается уменьшающийся недогруз этого вагона. Кроме того, при включении привода затвора выпускного отверстия 3.2 поступает сигнал на один из группы индикаторов 14.1. Если первый вагон выходит из под выпускного отверстия 3.1, то выход датчика 5.1 сформирует потенциал, который запрещает включение привода затвра выпускного отверстия 3.1 (запрещение подается в соответствующую цепь из группы 10.1) . Аналогично при достижении задней кромки вагона зоны чувствительности датчика 5.2 в цепи 10.1 появляется запрещение включения привода затвора выпускного отверстия 3.2. Если в процессе дальнейшего движения состава под выпускное отверстие 3.1 попадает второй вагон состава, то определитель 6.1 сформирует код, соответствующий порядковому номеру этого вагона в сос.таве. При этом в одной из цепей 10,2 появляется разрешение на открытие затвора выпускного отверстия 3.1, и при загрузке второго вагона в вычитающем блоке 12.2 фиксируется текущее значение недогруза этого вагона, которое визуально на индикаторе 13.2. В дальнейшем процесс контроля происходит точно так же,как это указано для первого вагона.
Таким образом, предложенное устройство по сравнению с известными позволяет осуществлять контроль одновременной погрузки нескольких транспортных средств без остановки на время погрузки состава, и тем самым значительно повышается производительность погрузки.
Формула изобретения
Устройство для автоматического контроля погрузки транспортных средств, содержащее весоизмерительный блок на погрузочном средстве, шифра тор нормы загрузки с цепями ввода грузоподъемности транспортных средств йодсоединеннымико вычитающего блока контроля степени загрузки, определитель порядкового номера загр жаемого транспортного средства, коммутатор и блок индикации, о тли - чающееся тем, что, с целью повышения производительности погрузки путем контроля одноврег енной погрузки нескольких движущихся транс портных средств, оно снабжено по числу мест погрузки двухпозиционными датчиками положения загружаемых тран портных средств, зоны чувствительное ти которых совмещены с местами погрузки, датчиками положения приводов управления грузопотоками, дополни-тельными определителями порядковых номеров загружаемых транспортных средств и дополнительными весоизмерительными блоками,а по числу транспортны средств в транспортной цепи дополните.ль нымйЪычитающими блоками контроля степ ни загрузЛ и блоками индикации, цепями разрешения записи начального кода, группами цепей разрешения вклю чения грузопотоков по числу мест пог рузки в каждой группе и группами индикаторов грузопотоков по числу мест погрузки в каждой группе, причем одни из выходов датчиков положения загружаемых транспортных средств,, выходы весоизмерительных блоков, определителей порядкового номера загружаемого транспортного средства и датчиков положения приводов управления грузопотоками соединены со входами коммутатора, который выполнен многоканальным, другие выходы датчиков положения загружаемых транспортных средств соединены со входами соответствующих определителей порядкового номера транспортнух средств, выходы многоканального коммутатора соединены с цепями разрешения включения грузопотоков, со входами индикаторов грузопотоков и через соответствующие сумматоры - с одними из входов вычитающих блоков контроля степени загрузки, к другим входам которых подключены цепи разрешений записи начального кода. Источники информации, принятые во внимание при экспе этизе 1.Авторское свидетельство СССР № 498636, кл. G 0,7 С 5/08, 1974, 2.Авторское свидетельство СССР № 516067, кл. С 07 С 5/10, 1974 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство весового контроля движущегося состава | 1979 |
|
SU879318A1 |
| Устройство для автоматическойпОгРузКи СыпучиХ гРузОВ ВдВижущиЕСя ТРАНСпОРТНыЕ СРЕдСТВА | 1978 |
|
SU806579A1 |
| Устройство для определения положения вагона на платформе весов и управления маневровым механизмом | 1976 |
|
SU657269A1 |
| Способ управления конвейерной линией | 1982 |
|
SU1500583A1 |
| Способ дозированной загрузки транспортных средств одноковшовым экскаватором и устройство для его осуществления | 1983 |
|
SU1193465A1 |
| Устройство для управления погрузкой сыпучих материалов из бункеров в движущийся состав | 1977 |
|
SU691371A1 |
| Устройство для дозированной загрузки по массе вагонов сыпучим грузом | 1983 |
|
SU1137326A1 |
| Устройство для контроля погрузки транспортных средств | 1974 |
|
SU516077A1 |
| Способ автоматической дозированной погрузки сыпучих материалов в движущиеся железнодорожные вагоны | 1985 |
|
SU1291517A1 |
| НАЗЕМНЫЙ ДИАГНОСТИЧЕСКИЙ КОНТРОЛЬНО-ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС | 1997 |
|
RU2120876C1 |
