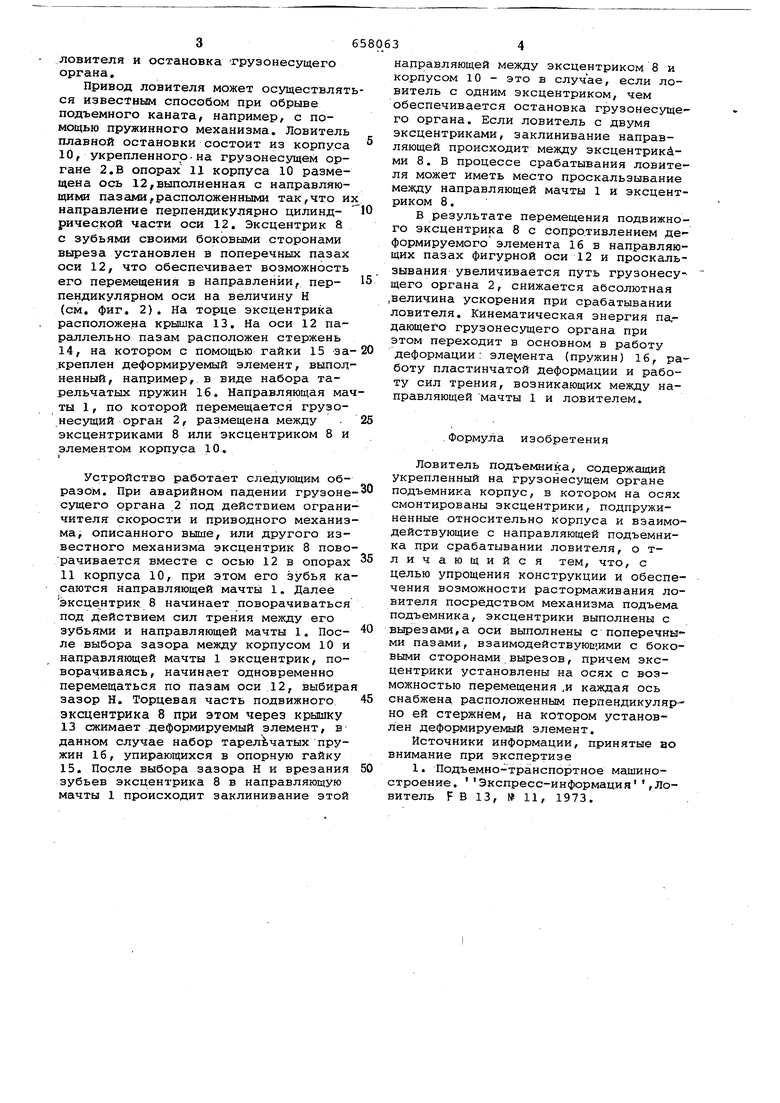
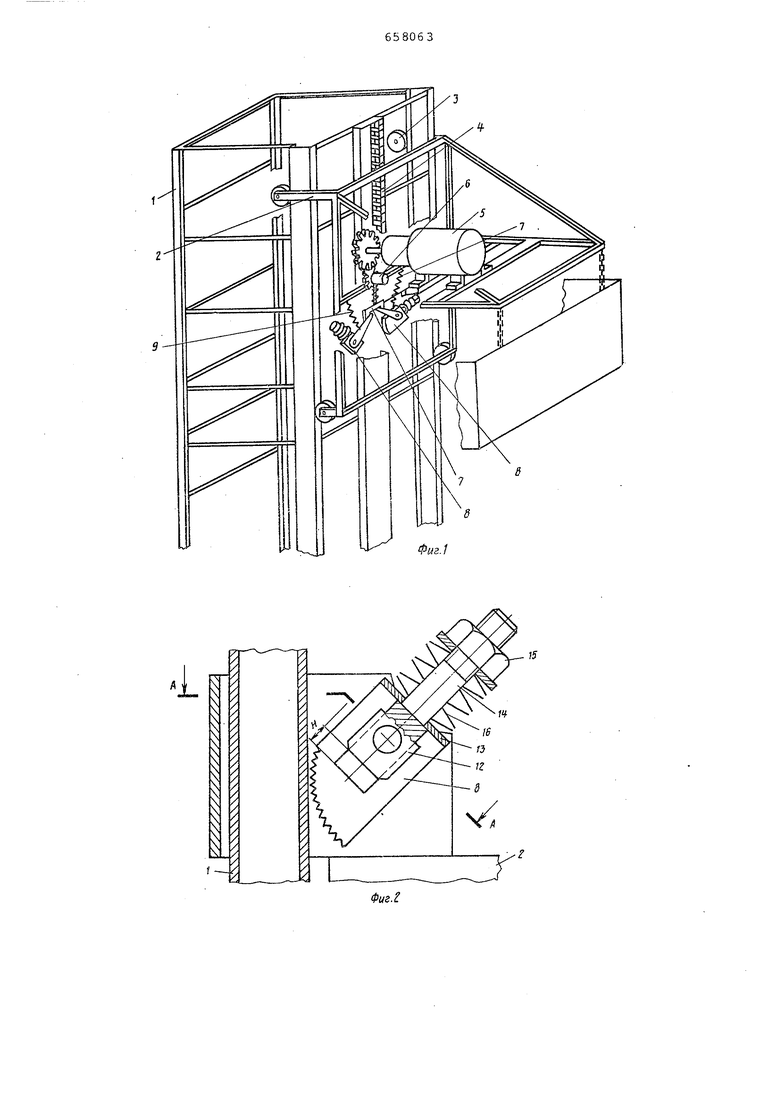
Изобретение относится к подъемнотранспортным устройствам и может быть использовано для улавливания грузонесущего органа на подъемниках с жесткими направляющими. Наиболее близким из известных технических решений к изобретению является ловитель подъемника, содержащий укрепленный на грузонёсущем органе подъемника корпус, в котором на осях смонтированы эксцентрики, подпружиненные относительно корпуса и взаимодействующие с направляющей подъемника при срабатывании ловителя ij . Недостатками такого устройства являются сложность конструкции и необходимость использования верхолазных работ при растормаживании сработавше го ловителя. Цель изобретения - упрощение конструкции и обеспечение возможности . растормаживания ловителя посредством механизма подъема подъемника. Это достигается тем, что эксцентрики выполнены с вырезами, а оси выполнены с поперечными пазами, взаимо действующими с боковыми сторонами вы резов, причем эксцентрики установлены на осях с возможностью перемещени и каждая ось снабжена расположенным перпендикулярно ей стержнем, на котором установлен деформируемый элемент, На фиг. 1 изображен подъемник с установленным на нем ловителем с двумя эксцентриками; общий вид; на; фиг. 2 - ловитель с одним эксцентриком, общий вид; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3; на фиг. 5 - ловитель с двумя эксцентриками, общий вид; на .фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - ловитель с одним зксцентриком в заклиненном состоянии. На мачте 1 подъемника установлен грузонесущий орган 2, перемещающийся по направляющим мачты на роликах 3. Вдоль мачты установлена зубчатая рейка 4, с которой сцепляется ведущая звездочка привода 5. С зубчатой.рейкой 4 также сцепляется зйездочка ограничителя скорости 6, который кинематически связан с подвижным подпружиненным стержнем 7. В траверсу этого стержня упираются рычаги эксцентриков 8, которые стремятся повернуться под действием пружин 9 после подъема стержня 7 при срабатывании ограничителя скорости 6. При повороте эксцентриков происходит срабатывание ловителя и остановка трузонесущего органа. Привод ловителя может осуществлять ся известным способом при обрыве подъемного каната, например, с помощью пружинного механизма. Ловитель плавной остановки состоит из корпуса 10, укрепленного.на грузонесущем органе 2.В опорах 11 корпуса 10 размещена ось 12,выполненная с направляющими пазами,расположенными так,что их направление перпендикулярно цилиндрическрй части оси 12. Эксцентрик & с зубьями своими боковыми сторонами выреза установлен в поперечных пазах оси 12, что обеспечивает возможность его перемещения в направлении, перпендикулярном оси на величину Н (см. фиг. 2). На торце эксцентрика расположена крышка 13. На оси 12 параллельно пазам расположен стержень 14, на котором с помощью гайки 15 закреплен деформируемый элемент, выподненный, например, в виде набора тарельчатых пружин 16. Направляющая мач ты 1 , по которой перемещается грузонесущий орган 2, размещена между . эксцентриками 8 или эксцентриком 8 и элементом корпуса 10. Устройство работает следующим образом. При аварийном падении грузоне сущего органа 2 под действием ограни чителя скорости и приводного механиз ма, описанного выше, или другого известного механизма эксцентрик 8 пово рачивается вместе с осью 12 в опорах 11 корпуса 10, при этом его зубья ка саются направляющей мачты 1. Далее эксцентрик 8 начинает поворачиваться под действием сил трения между его зубьями и направляющей мачты 1. После выбора зазора между корпусом 10 и направляющей мачты 1 эксцентрик, поворачиваясь, начинает одновременно перемещаться по пазам оси 12, выбира зазор Н. Торцевая часть подвижного эксцентрика 8 при этом через крышку 13 сжимает деформируемый элемент, вданном случае набор тарельчатых пружин 16, упирающихся в опорную гайку 15. После выбора зазора Н и врезания зубьев эксцентрика 8 в направляющую мачты 1 происходит заклинивание этой направляющей между эксцентриком 8 и корпусом 10 - это в случае, если ловитель с одним эксцентриком, чем обеспечивается остановка грузонесущего органа. Если ловитель с двумя эксцентриками, заклинивание направляющей происходит между эксцентрик ми 8. В процессе срабатывания ловителя может иметь место проскальзывание между направляющей мачты 1 и эксцентриком 8. В результате перемещения подвижного эксцентрика 8 с сопротивлением деформируемого элемента 16 в направляющих пазах фигурной оси 12 и проскальзывания увеличивается путь грузонесущего органа 2, снижается абсолютная величина ускорения при срабатывании ловителя. Кинематическая энергия па,дающего грузонесущего органа при этом переходит в основном в работу деформации: (пружин) 16, работу пластинчатой деформации и работу сил трения, возникающих между направляющей мачты 1 и ловителем. Формула изобретения Ловитель подъемника, содержащий укрепленный на грузонесущем органе подъемника корпус, в котором на осях смонтированы эксцентрики, подпружиненные относительно корпуса и взаимодействующие с направляющей подъемника при срабатывании ловителя, о тличающийся тем, что, с целью упрощения конструкции и обеспечения возможности растормаживания ловителя посредством механизма подъема подъемника, эксцентрики выполнены с вырезами,а оси выполнены с поперечными пазами, взаимодействующими с боковыми сторонами вырезов, причем эксцентрики установлены на осях с возможностью перемещения ,к каждая ось снабжена расположенным перпендикулярно ей стержнем, на котором установлен деформируемый элемент. Источники информации, принятые во внимание при экспертизе 1. Подъемно-транспортное машиностроение. Экспресс-информация,Ловитель F В 13, 11, 1973.
ФигЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель грузонесущего органа подъемника | 1982 |
|
SU1076392A2 |
| Ловитель клети подъемника | 1981 |
|
SU1006360A1 |
| Ловитель грузонесущего органа подъемника | 1986 |
|
SU1357331A1 |
| Ловитель грузонесущего органа подъемника | 1978 |
|
SU745846A1 |
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| ЭКСЦЕНТРИКОВЫЙ ЛОВИТЕЛЬ ДЛЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2329940C2 |
| Ловитель подъемника | 1989 |
|
SU1728109A1 |
| Устройство для аварийной остановки грузонесущего органа подъемника | 1977 |
|
SU650934A1 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| УСТРОЙСТВО АВАРИЙНОГО ТОРМОЖЕНИЯ | 2013 |
|
RU2527626C1 |
А-Д
б- б
