Изобретение относится к грузоподъемным машинам к прежде всего к строител ным подъемникам. Наиболее близким техническим решени является ловитель грузонесушего органа подъемника, содержащий амортизирующие элементы и захват, взаимодействующий с направляющей и установленный в корпусе, подвижном в плоскости рамы грузо несущего органа Fll. Недостатком устройства является сра& нительно невысокая надежность, обуслов ленная возможностью перекоса корпуса . ловителя при срабатывании последнего. Цель изобретения - пЬвыщение надежности путем устранения перекоса корпуса при срабатывании ловителя. Указания цель достигается тем, что в корпусе установлены эксцентрик, опорный ролик, взаимодействующий с направляющей, и демпфирующий механизм, содержащий закрепленную на каретке вертикальную стойку, прямоугольногчэ сечения и корпус со щеками, между которыми
l J «2 5i;efe i.2i-fti iU :i
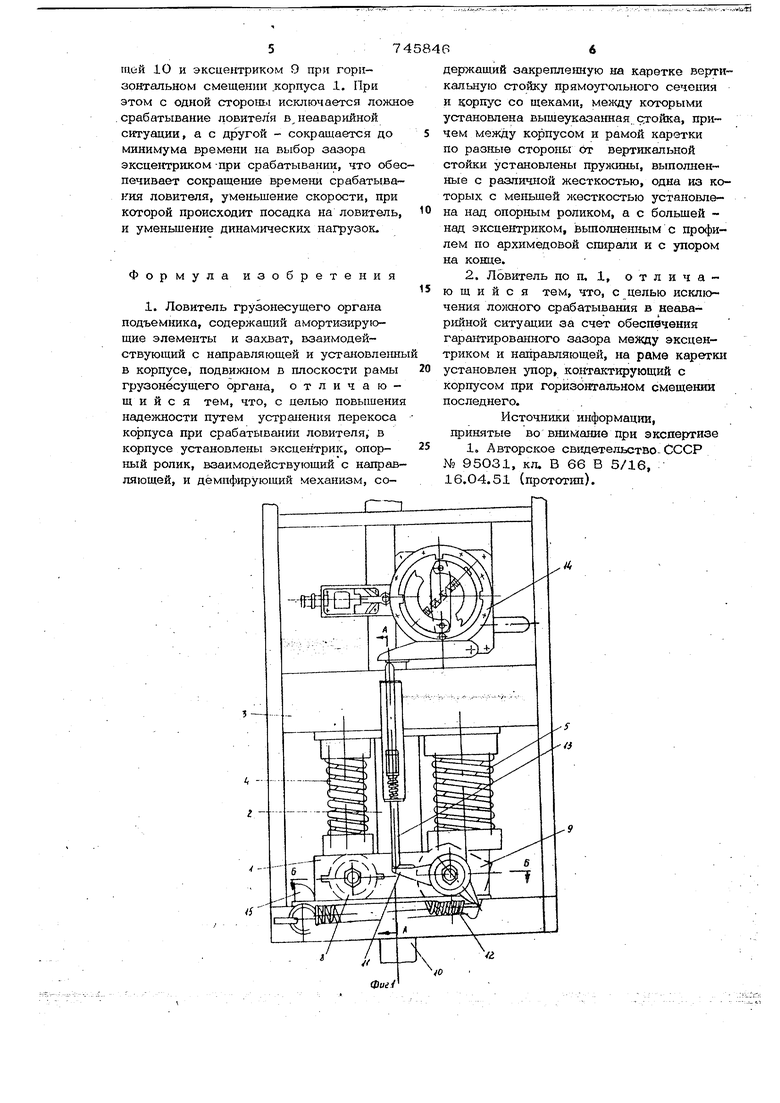
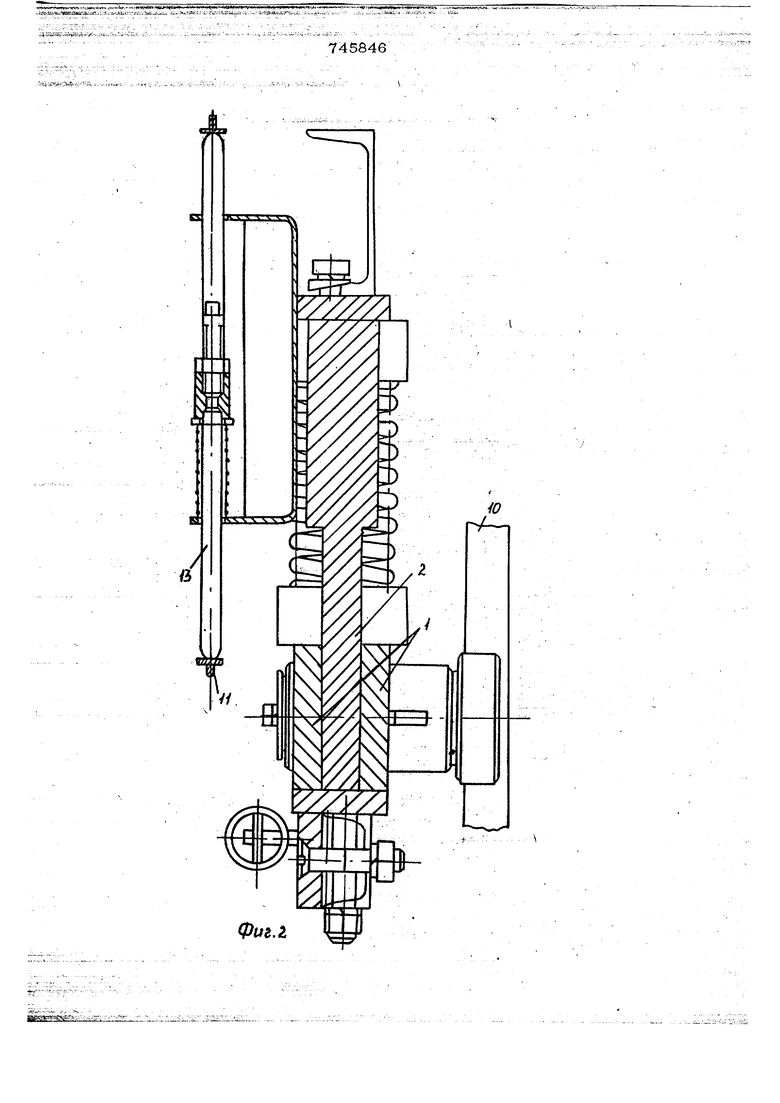
::- V.v:.. 1Рй: установлена вышеуказанная - стойка, причем между корпусом и рамой каретки по разные стороны от вертикальной стойки установлены пружины, выполненные с различной жесткостью, одна из которых с меньшей жесткостью установлена над опорным роликом, а с большей - над эксцентриком, выполненным с профилем по архимедовой спирали и с упором на конце. Кроме того, с целью исключения ложного срабатывания в неаварийной ситуации за счет обеспечения гарант1фованного зазора между эксцёкгриксм и нап-равляющей, на раме каретки установлен упор, контактирующий с корпусом, при горизонтальном смещении последнего. I На фиг. 1 изображен ловитель, общий вид; на фиг. 2 - разрез А-А на фиг. 1} на фиг. 3 - разрез Б-Б на фиг. 1 на фиг. 4 - эксцентрик ловителя. Устройство включает демпфер, вьшолненный в виде подвижного корпуса 1, установленного подвижно на стойке 2 прямоугчотьного сечения, которая по ксацам закреплена на раме 3 кйретки гру аонесущего органа. Между корпусом и рамой 3 каретки в станках уст;ановлен буфер, выпошенный в виде пружин 4 и 5 различной жесткости. В корпусе 1 установлены на осях 6 и 7 опорный ролик 8 и поворотный йксцентрик 9, меж ду которыми размещена направляющая 1О мачты. К оси 6 жестко прикреплена тяга II, одним kbJauoM соединёшаая через пружины 12 с рамой 3 каретки, а другой конец которой упирается в стер жень 13. Последний подпружинен и взаим действует с ограничителем скорости 14, чувствительный элемент которого кинематически связад с мачтой посредством специальной зубчатой передачи (для подъемников с бесканатным реечным механизмом подъема) или бесконечного каната (для подъемников с канатными механизмами подъема). На раме каретки установлей со стороны опорного ролика 8 упор 15. Пружина 4 имеет меньшую жёс кость и установпена над опорным ролшсом 8, а хфужина 5 Имеет большую зкесткост й установлена над эксцентриком 9. Профиль эксцентрика 9 (фиг. 4) на участке В-В выпо нен по архимедовой спирали с зубьями на рабочей поверхности .и с упором jaa конце --(участок ВГ).: :. V . Устройство работает следующим образом, -.. /г- .;;-; . При срабатывании ох аничителя скоро ти 14 освобождается подпружиненный стержень .13 и под -действием пружицы . 12 поворачивается тяга 11 о эксцеетриком 9, когррцй:j p№ направл51ющ©й -Ip. i ai4Tbii Псспедйяя зажи мается Mekjjy fikcateH-tpiaifcow 9 -и опор. кьшрощкЬм.. шщает тормЬз1яое :уЬио1йё:и.сзрпус -1.с эксцентриком и ррпйкдм затЪрмажиозаетсд а рама 3 каретки скабиной прбдолжает падать. В связи с тем, что ррлик 8 к . эксцентрик 9 посажён крнсольйо на осях 6 и 7, то на корпус 1 будет действовать момент от тормозных сил, который стремится повернуть корпус плоскости рамь 3 каретки. Поскольку каёина лродолжает падать, то при этом корпус 1, заторможешйгй Относительно нГалралля ющей 10, будет перемешаться относительно стойки 2, сжимая приэтом пружи ны 4 и 5. За c4iBT вьшолнения стойки 2 в ввде Жоскогчэ стер:жн прш юу сечения обеспечивается движение корпуса 1 в плоскости рамы 3. При движении корпуса возникает значительное трение меходу его щеками и проходящей между
KLa5Ei:: 2:;;.i.3i;..:.;i;;u 7 6 ними стойкой. Это происходит в результате поворота корпуса от действия момента от тормозных сил и обеспечивает рассеивание некоторой части кинематической энергии, т.е. работает как демпфер, сухого трения. Другая часть энергии переходит в потенциальную энергию сжатия пружин 4 и 5. При сжатии пружин увеличивается тормозной путь кабины и уменьща;{отся динамические нагрузки и ускорения при торможении. В результате того, что эксцентрик создает большое тормозное усилие, а ролшс-меньшее то над экcцeнтpJ IKOм установлена пружина большей жесткости, а над роликом - меньшей. Это обеспечивает перемещение корпуса 1 в горизонтальном положении без перекоса в плоскости рамы 3 и создает нормальные условия работы ловителя. После полной деформации пружин 4 и 5 устройство начинает работать, как ловительразного торможения, т.е. происходит дальнейший поворот эксцентрика 9 и ролика 8 Р движении кабины вниз и полное заклиниванйе этих элементов на направляющей 10. При этом оставшаяся часть кинематической энергии переходит в работу по пластической деформации направляющей. Профиль эксцентрика 9 выполнен по архимедовой .спирали, у которой угол зацепле-J .ния. близок зацепления логарифмической, спирали, У последней он стабилен. ОйнакО; технологически изготовление эксцёнт зика по логарифмической спирали очень слгожнО, так кик требует применения специальньис копиров или шаблонов. Профиль. пО .архимедовой спирали изго.то ляется. проще.. Он может быть получен без -каких-либо приспос.облений, а только за .счёт использования обычных рабогчих операций станка без дополнительной рснасткй. В тоже время угол зацепления архимедовой спирали .изменяется незнаЧитёльЗао. и Нйходится .в пределах, обесп чйва1оцшх-условия заклинивания эксцентрика. Наличие упора в конце рабочего профиля йСкЯйчает запрокидывания эксцентрика, ограничивая угол поворота. Посколлэку при этом коэффициент трения akж:e изиеняется незначительно, то это гарантирует надежность торможения. При выполнении эксцентрика с другим профилем, например, по окружности,условия самоЗаклинивания нарушаются, что может привести к аварийной ситуации. На раме 3 каретки установлен упор 15, предназначенный для обеспечения минимального зазора между направляю юй 10 И эксцентриком 9 при горизонтальном смещении корпуса 1. При этом с одной сторош, исю1ючается лож -срабатывание ловителя в неаварийной ситуации, а с другой - сокращается до минимума времени на выбор зазора эксцентриком -при срабатывании, что об печивает сокращение времени срабатыва ния ловителя, уменьшение скорости, при которой происходит посадка на ловитель и уменьшение динамических нагрузок. ормула из обретен и 1. Ловитель груаонесущего органа подъемника, содержащий амортиаиру,ощие элементы и захват, взаимодействующий с направляющей и установлеш в корпусе, подвижном в плоскости рамы грузонесущего органа, отличающийся тем. что. с целью повышени надежности путем устранения перекоса корпуса при срабатывании ловителя, в корпусе установлены эксцентрик, опорный ролик, взаимодействующийс направляющей, и демпфирующий механизм, со40держащий закреплешую на каретке вертикальную стойку прямоугольного сечения и корпус со щеками, меиоду к люрыми установлена вышеуказанная, стойка, причем между корпусом и рамой каретки по разные стороны от вертикальной стоики установлены прумшны, выполнен le с различной жесткостью, одна из ко1° Г жесткостью установлена над опорным роликом, а с большей над эксцевдршадм, выполненным с проДинГко вде ° ° ° 2. Лбвитель по п, 1, о т л и ч а 1Ги . с целью искл,очения лолшого срабатывания в неаваринной ситуации за счет обеспечения гарантированного зазора между эксцентриком н направляющей, на Se установлен упор, контактирующий с -Ризо альном смещении . Источники информации принятые во внимание при экспертизе , а;п Т °в ° СССР 95031, кл. В 66 В 5/16 6.04.51 (прототип).
745846

| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель грузонесущего органа подъемника | 1982 |
|
SU1076392A2 |
| ЛЕСТНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2703812C1 |
| Ловитель клети подъемника | 1981 |
|
SU1006360A1 |
| Самоходный подъемник для восстающих выработок | 1980 |
|
SU972101A1 |
| ЛОВИТЕЛЬ ДЛЯ ГРУЗОВОГО ПОДЪЕМНИКА | 2013 |
|
RU2526315C1 |
| Автоматическая каретка подвесной канатной установки | 1973 |
|
SU495223A1 |
| ЛИФТ И УСТРОЙСТВО ВКЛЮЧЕНИЯ ЛОВИТЕЛЕЙ КАБИНЫ ЛИФТА С ПОДВЕШЕННЫМ НА ТРАВЕРСЕ КУПЕ | 2003 |
|
RU2253604C2 |
| Тяговое устройство | 1978 |
|
SU727860A1 |
| Устройство для подачи полосового и ленточного материала в рабочую зону пресса | 1983 |
|
SU1134264A1 |
| Устройство для аварийной остановки грузонесущего органа подъемника | 1981 |
|
SU1014796A1 |
97/7/y
Фиг.г.
